路径规划方法及自走机器人与流程
- 国知局
- 2024-07-30 09:24:32
本发明是有关于一种自动控制技术,且特别是有关于一种路径规划方法及自走机器人。
背景技术:
1、现今自走车系统可使用同步定位与映射(simultaneous localization andmapping,slam)或轨道系统,以达成自主行走。现有已有多种应用利用自走车系统。例如,紫外线杀菌(ultraviolet-c,uvc)机器人。不同应用可能面临到不同困难。例如,由于uvc机器人的机构设计限制,紫外线灯管只能朝固定方向照射,因此机器人运行时必须让紫外灯照射的那面朝向消毒目标。当uvc机器人运行的同时,若与消毒目标的距离太远,会导致消毒效率变差。然而,若与消毒目标的距离太近,则容易造成机器人与消毒目标碰撞。
技术实现思路
1、有鉴于此,本发明实施例提供一种路径规划方法及自走机器人,可规划合适的路线,以提升机器人的运行效率。
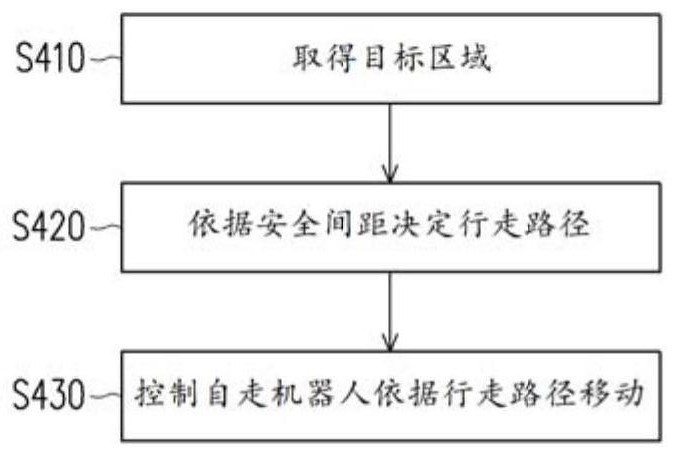
2、本发明实施例的路径规划方法包括(但不仅限于)下列步骤:取得目标区域。依据安全间距决定行走路径。行走路径与目标区域的边界之间至少相距安全间距。控制自走机器人依据行走路径移动。
3、本发明实施例的自走机器人包括(但不仅限于)移动机构、存储器及处理器。存储器用以存储程序代码。处理器耦接移动机构及存储器。处理器用以载入程序代码以执行:取得目标区域,依据安全间距决定行走路径,并控制移动机构依据行走路径移动。行走路径与目标区域的边界之间至少相距安全间距。
4、基于上述,依据本发明实施例的路径规划方法及自走机器人,可设定与目标区域的边界相距特定安全间距的行走路径。借此,可提升运行效率,并节省资源浪费。针对例如是uvc机器人的应用,不仅可避免或减少碰撞,还可维持消毒效率。
5、为让本发明的上述特征和优点能更明显易懂,下文特举实施例,并配合所附附图作详细说明如下。
技术特征:1.一种路径规划方法,包括:
2.根据权利要求1所述的路径规划方法,其中依据该安全间距决定该行走路径的步骤包括:
3.根据权利要求2所述的路径规划方法,其中该安全间距是该目标节点至该行走路径的最短距离,该目标区域包括第一边及第二边,该目标节点位于该第一边及该第二边的交界处,且由该目标节点向外延伸该安全间距的步骤包括:
4.根据权利要求3所述的路径规划方法,还包括:
5.根据权利要求4所述的路径规划方法,其中决定该第三夹角是否为该凹角包括:
6.根据权利要求3所述的路径规划方法,其中定义该行走路径中的该第二路径节点的步骤包括:
7.根据权利要求1所述的路径规划方法,其中该自走机器人设有消毒器,该行走路径上有多个路径节点,且该路径规划方向还包括:
8.根据权利要求1所述的路径规划方法,其中该自走机器人设有消毒器,且该路径规划方向还包括:
9.根据权利要求1所述的路径规划方法,其中决定该目标区域的步骤包括:
10.根据权利要求1所述的路径规划方法,其中决定该目标区域的步骤包括:
11.一种自走机器人,包括:
12.根据权利要求11所述的自走机器人,其中该处理器还执行:
13.根据权利要求12所述的自走机器人,其中该安全间距是该目标节点至该行走路径的最短距离,该目标区域包括第一边及第二边,该目标节点位于该第一边及该第二边的交界处,且该处理器还执行:
14.根据权利要求13所述的自走机器人,其中该处理器还执行:
15.根据权利要求14所述的自走机器人,其中该处理器还执行:
16.根据权利要求13所述的自走机器人,其中该处理器还执行:
17.根据权利要求11所述的自走机器人,还包括:
18.根据权利要求11所述的自走机器人,还包括:
19.根据权利要求11所述的自走机器人,其中该处理器还执行:
20.根据权利要求11所述的自走机器人,其中该处理器还执行:
技术总结本发明提出一种路径规划方法及自走机器人。在方法中,取得目标区域。依据安全间距决定行走路径。行走路径与目标区域的边界之间至少相距安全间距。控制自走机器人依据行走路径移动。借此,可改善操作效率。技术研发人员:苏鼎杰,郑先淳,杨震伟,郭尊贤受保护的技术使用者:纬创资通股份有限公司技术研发日:技术公布日:2024/7/23本文地址:https://www.jishuxx.com/zhuanli/20240730/149385.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表