测控系统及其同步方法、计算装置与流程
- 国知局
- 2024-07-30 09:25:37
本发明属于量子信息,具体地讲,涉及一种测控系统及其同步方法、计算装置。
背景技术:
1、在多量子比特的量子计算中,被操作对象是含有多个量子比特的量子芯片。具体地,通过量子测控系统对量子芯片上制备的多个量子比特进行操控,实现某种量子算法,并通过量子测控系统读取多个量子比特的测量输出而获得计算的结果。
2、每个量子比特都是具有生命时间的。量子比特的寿命(即量子退相干时间)非常短,其一般不超过500微秒。一个量子比特保持信息不丢失的时间为它的“寿命”。由于噪声以及量子过程内在的随机性,这个所谓“寿命”实际上是一个统计上的特征时间,物理上我们称为“退相干时间”。所有量子计算的操控动作,原则上应该在远小于这个时间内完成,以避免错误的发生,并且一般在量子比特的寿命中,操作人员期望对其进行尽可能多的操作次数以便来增加量子计算的步骤数。一次量子门操作时间大约在10-100纳秒量级,这些操作都是基于多个量子比特被同步驱动,因而减少多个驱动的不同步性,降低多个驱动波形信号的输出偏差到纳秒级别乃至以下,显得非常重要。
3、在多个量子比特被同步驱动中,需要使用多个驱动模块,其中,一个驱动模块对相应的一个量子比特进行驱动。常见的驱动模块(例如任意波形发生器awg)一般包括有三个端口:一个为触发端口,一个为驱动波形端口,一个为标志端口。该驱动模块的工作原理为:对于每个准备好发射波形的驱动模块,当触发端口从触摸模块接收到触发信号的上升沿后,在经过预定延时时长的触发延迟之后,驱动波形端口输出驱动波形信号,同时标志端口输出与驱动波形信号同步的标志波形信号。图1为现有的驱动模块的三个端口的信号时序关系图。其中,trig-1、drive-1和mark-1对应的是第一驱动模块的三个端口的信号,trig-2、drive-2和mark-2对应的是第二驱动模块的三个端口的信号。
4、在现有的触发模块中,由于触发信号被不停地反复生成,而多个驱动模块需要逐个配置,因此驱动模块配置完成的时间不同会导致各驱动模块输出的驱动波形信号无法对齐。
技术实现思路
1、为了解决上述现有技术存在的问题,本发明提供了一种测控系统及其同步方法、计算装置。
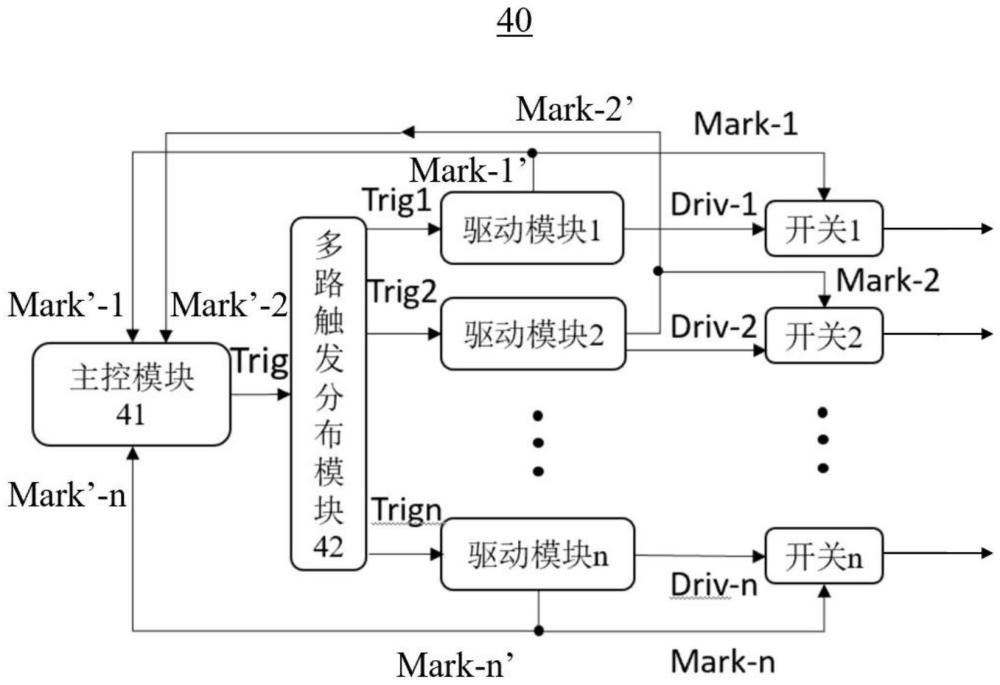
2、根据本发明的实施例的一方面提供的测控系统包括主控模块和多路测控通道,每路测控通道包括驱动模块和开关;所述主控模块用于向每路测控通道的驱动模块提供触发信号;每路所述测控通道的驱动模块用于响应其接收到的触发信号而生成驱动波形信号、标志波形信号以及反馈波形信号,且用于将生成的驱动波形信号和标志波形信号输出至相应的开关;每路所述测控通道的开关用于从相应的驱动模块接收驱动波形信号和标志波形信号,其中,该驱动波形信号经过响应了该标志波形信号的开关后形成的有效信号到达开关的输出端,从而被提供至被驱动器件;所述主控模块还用于接收各路测控通道的延时后的反馈波形信号,且用于根据各个延时后的反馈波形信号以及触发信号控制调整各路测控通道的通道响应时长相等。
3、在上述一方面提供的测控系统的一个示例中,所述测控系统还包括:多路触发分布模块,用于将所述主控模块生成的触发信号进行多路分路,以向每路测控通道提供相应的触发信号。
4、在上述一方面提供的测控系统的一个示例中,所述主控模块包括:触发信号生成单元,用于生成触发信号;延时计算单元,用于根据所述触发信号以及各路测控通道的延时后的反馈波形信号计算出各路测控通道的通道响应时长;延时信号生成单元,用于根据各路测控通道的通道响应时长确定需进行延时的测控通道,并生成对应于需进行延时的测控通道的延时信号;其中,需进行延时的测控通道的驱动模块用于根据延时信号来延时响应触发信号,从而各路测控通道的通道响应时长相等;其中,需进行延时的测控通道的通道响应时长小于最长通道响应时长。
5、在上述一方面提供的测控系统的一个示例中,所述通道响应时长包括:所述主控模块发出触发信号至所述驱动模块的固定响应时长、所述驱动模块响应所述触发信号的触发响应时长,以及所述驱动模块输出驱动波形信号和标志波形信号到所述开关且有效信号到达所述开关的输出端的传输响应时长;其中,各路测控通道的固定响应时长相同,且各路测控通道的传输响应时长相同。
6、在上述一方面提供的测控系统的一个示例中,各路测控通道的驱动模块输出反馈波形信号,直至所述主控模块接收到延时后的反馈波形信号所用的时长分别与相应的各路测控通道的传输响应时长相同。
7、在上述一方面提供的测控系统的一个示例中,所述触发信号包括起始位、停止位以及插入所述起始位和所述停止位之间的数据帧,所述数据帧包括实时时钟数据帧,或者所述数据帧包括实时时钟数据帧和命令数据帧。
8、根据本发明的实施例的另一方面提供的测控系统的同步方法,包括:所述主控模块向每路测控通道的驱动模块提供触发信号;每路所述测控通道的驱动模块响应其接收到的触发信号而生成驱动波形信号、标志波形信号以及反馈波形信号,且将生成的驱动波形信号和标志波形信号输出至相应的开关;每路所述测控通道的开关从相应的驱动模块接收驱动波形信号和标志波形信号,其中,该驱动波形信号经过响应了该标志波形信号的开关后形成的有效信号到达开关的输出端,从而被提供至被驱动器件;所述主控模块接收各路测控通道的延时后的反馈波形信号,且根据各个延时后的反馈波形信号和触发信号控制调整各路测控通道的通道响应时长相等。
9、在上述另一方面提供的测控系统的同步方法的一个示例中,所述主控模块根据各个延时后的反馈波形信号以及触发信号控制调整各路测控通道的通道响应时长相等的方法进一步包括:所述主控模块根据其生成的触发信号以及各个延时后的反馈波形信号计算出各路测控通道的通道响应时长;所述主控模块根据各路测控通道的通道响应时长确定需进行延时的测控通道,且生成并输出对应于需进行延时的测控通道的延时信号;需进行延时的测控通道的驱动模块用于根据其接收到的延时信号来延时响应触发信号,从而各路测控通道的通道响应时长相等;需进行延时的测控通道的通道响应时长小于最长通道响应时长。
10、在上述另一方面提供的测控系统的同步方法的一个示例中,所述通道响应时长包括:所述主控模块发出触发信号至所述驱动模块的固定响应时长、所述驱动模块响应所述触发信号的触发响应时长,以及所述驱动模块输出驱动波形信号和标志波形信号到所述开关且有效信号到达所述开关的输出端的传输响应时长;各路测控通道的固定响应时长相同,且各路测控通道的传输响应时长相同。
11、在上述另一方面提供的测控系统的同步方法的一个示例中,各路测控通道的驱动模块输出反馈波形信号,直至所述主控模块接收到延时后的反馈波形信号所用的时长分别与相应的各路测控通道的传输响应时长相同。
12、根据本发明的实施例的又一方面提供的计算装置包括测控系统和被驱动器件,所述测控系统用于与所述被驱动器件进行相互作用,以进行计算。
13、在上述又一方面提供的计算装置的一个示例中,所述被动器件为量子芯片,所述测控系统为量子测控系统。
14、有益效果:根据本发明的实施例的测控系统及其同步方法,通过使主控模块根据各路测控通道的反馈波形信号以及触发信号来控制调整各路测控通道的通道响应时长相等,从而可使各驱动模块输出的驱动波形信号完全对齐,实现1纳秒以内级别的高精度同步。
本文地址:https://www.jishuxx.com/zhuanli/20240730/149412.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表