自主移动装置的制作方法
- 国知局
- 2024-07-30 09:25:30
本发明涉及自主移动装置。
背景技术:
1、以往,已知有采用了slam(即时定位与地图构建(simultaneous localizationand mapping))的自主行驶车辆(参照专利文献1)。例如,通过在自主行驶车辆中并用摄像机、激光传感器等外部传感器、和编码器、陀螺仪这样的内部传感器,从而自主行驶车辆估计自身位置,并自动生成行驶路径,因此能够不束缚于固定路线而进行障碍物的自动规避。这些自主行驶车辆不需要在地面(日文:床)埋入电线、或者在地面进行标记这样的基础设施。有时将使用摄像机的slam称为视觉slam(visual slam),将使用激光传感器的slam称为激光雷达slam(lidar slam)。
2、此外,在使移动体自主行驶到目标地点为止的自主移动装置中,如下进行,即,由设置于移动体的前方的发送机发送声音信号,并由麦克风等接收机来接收被障碍物反射的声音信号,由此设定规避了与障碍物的接触的行驶路径来行驶(参照非专利文献1)。
3、现有技术文献
4、专利文献
5、专利文献1:日本特开2020-181485号公报
6、非专利文献
7、非专利文献1:avoidance of non-localizable obstacles in echolocatingbats:a robotic model.carl bou mansour,elijah koreman,jan steckel,herbertperemans,dieter vanderelst.
技术实现思路
1、发明要解决的课题
2、然而,依赖于从目标对象或者自主移动装置自身发出的电波进行自主移动的现有技术中,在存在大量类似电波等各种各样的干扰噪声的情况下,存在角度方位等的估计精度降低这样的课题。
3、另外,以往,还开发了从接收到的电波中去除干扰噪声的、卡尔曼滤波器等的噪声分离计算处理方法,但在该方法中,存在导致信息计算量增大,并需要大规模的计算机,而还导致功耗的增大这样的问题。
4、本公开是鉴于这样的现有技术所具有的课题而完成的,本公开提供即使在存在类似电波等各种各样的干扰噪声的情况下,也无需增大信息计算量,就能够防止自主移动控制的精度降低的自主移动装置。
5、用于解决课题的手段
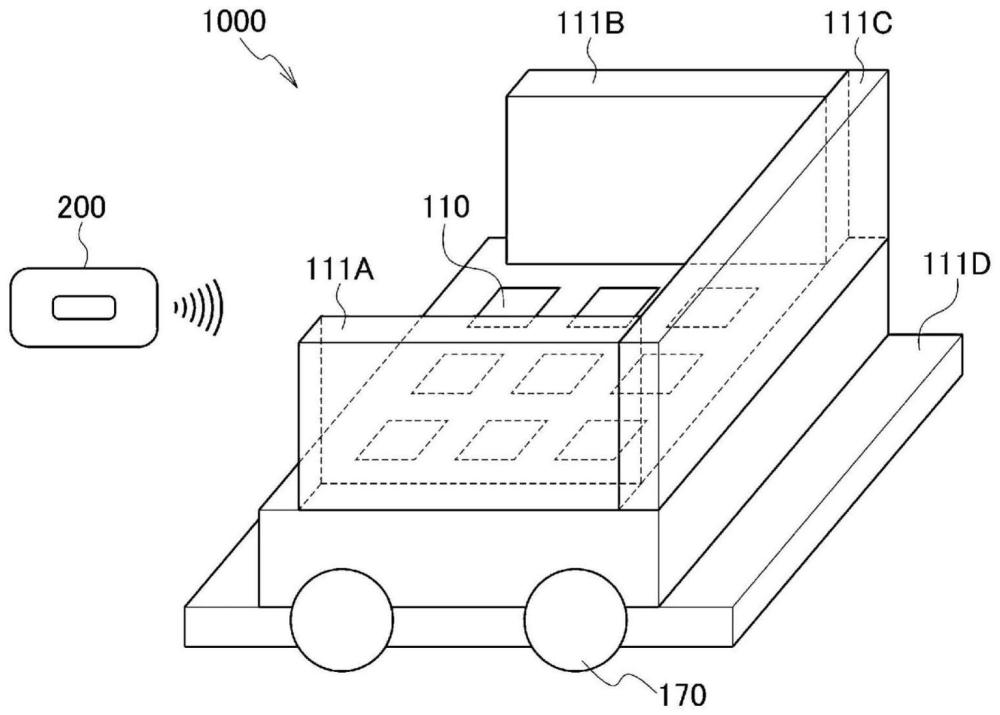
6、为了解决上述的课题,本公开的一方式所涉及的自主移动装置是朝向预先设定的目标对象自主地移动的自主移动装置,其具备:多个电波接收部,接收从该自主移动装置或外部发送的电波;电波防止部,阻断或吸收从所述电波接收部观察时来自规定的方向的电波;移动方向设定部,根据基于所述多个电波接收部的测定结果,设定该自主移动装置的移动方向;以及动作控制部,进行控制,以使该自主移动装置向由所述移动方向设定部设定的移动方向行驶。
7、发明效果
8、根据本公开,即使在存在类似电波等各种各样的干扰噪声的情况下,也不使信息计算量增大,而能够防止自主移动控制的精度降低。
技术特征:1.一种自主移动装置,朝向预先设定的目标对象自主地移动,所述自主移动装置具备:
2.如权利要求1所述的自主移动装置,其中,
3.如权利要求1或2所述的自主移动装置,其中,
4.如权利要求1至3中任一项所述的自主移动装置,其中,
5.如权利要求1至4中任一项所述的自主移动装置,其中,
6.如权利要求1至5中任一项所述的自主移动装置,其中,
技术总结自主移动装置(100)是朝向预先设定的目标对象自主地移动的装置,其具备:多个电波接收部(110),接收从该自主移动装置(100)或外部装置(200)发送的电波;电波防止部(111),阻断或吸收从电波接收部(110)观察时来自规定的方向的电波;移动方向设定部(134),根据基于多个电波接收部(110)的测定结果,设定该自主移动装置(100)的移动方向;以及动作控制部(135),进行控制,以使该自主移动装置(100)向由移动方向设定部(134)设定的移动方向行驶。技术研发人员:矢熊宏司,安田雅浩受保护的技术使用者:罗姆股份有限公司技术研发日:技术公布日:2024/7/23本文地址:https://www.jishuxx.com/zhuanli/20240730/149405.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表