基于目标识别的路况实时监测方法
- 国知局
- 2024-07-31 21:07:03
本发明涉及目标识别,具体涉及基于目标识别的路况实时监测方法。
背景技术:
1、道路在使用过程中受行车荷载和自然环境因素的作用,道路路面会逐渐产生磨损,为了保证车辆在道路行驶时的可以安全行驶,需要对道路路面进行目标识别。现有方法通常利用霍夫变换算法抽取道路路面中的车道线,然后根据车道线通过grabcut算法完成路况的实时监测。
2、除车道线以外,道路路面中的磨损裂纹、道路修补等区域都会在霍夫变换算法的霍夫空间中存在若干数据点,干扰车道线对应数据点的识别;而传统的霍夫变换算法仅通过单一的直线公式参数累加投票的阈值,无法有效识别车道线对应的数据点,导致路面的目标识别结果的准确性降低,降低路况的监测效率。
技术实现思路
1、本发明提供基于目标识别的路况实时监测方法,以解决现有的问题:传统的霍夫变换算法仅通过单一的直线公式参数累加投票的阈值,无法有效识别车道线在霍夫空间中对应的数据点,导致路面的目标识别结果的准确性降低。
2、本发明的基于目标识别的路况实时监测方法采用如下技术方案:
3、包括以下步骤:
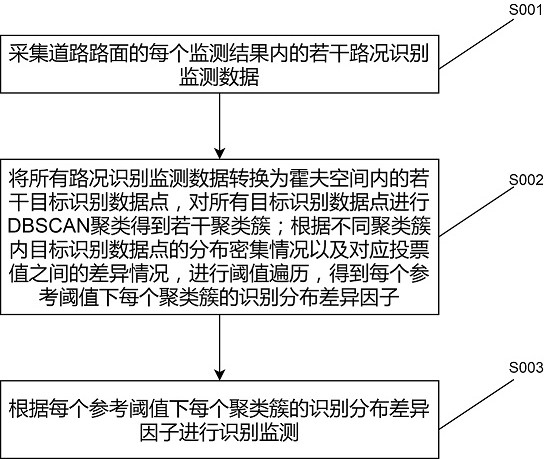
4、采集道路路面的每个监测结果内的若干路况识别监测数据;
5、利用霍夫变换算法将每个监测结果内所有路况识别监测数据转换为霍夫空间内的若干数据点,将每个数据点记为目标识别数据点,所述目标识别数据点对应一个投票值;对所有目标识别数据点进行dbscan聚类得到若干聚类簇;根据不同聚类簇内目标识别数据点的分布密集情况以及对应投票值之间的差异情况,进行阈值遍历,得到每个参考阈值下每个聚类簇的识别分布差异因子,所述识别分布差异因子用于反映参考阈值下各个聚类簇所区分出属于车道线的目标识别数据点的数量;
6、根据每个参考阈值下每个聚类簇的识别分布差异因子进行识别监测。
7、优选的,所述根据不同聚类簇内目标识别数据点的分布密集情况以及对应投票值之间的差异情况,进行阈值遍历,得到每个参考阈值下每个聚类簇的识别分布差异因子,包括的具体方法为:
8、对于任意一个聚类簇,根据聚类簇内目标识别数据点的分布密集情况以及目标识别类簇面积,得到聚类簇的直线段聚集度;
9、将聚类簇内的任意一个目标识别数据点记为特征目标识别数据点,根据特征目标识别数据点周围区域内目标识别数据点整体趋向中心的分布情况,以及聚类簇的直线段聚集度,得到特征目标识别数据点的分布影响程度;获取每个目标识别数据点的分布影响程度;
10、将所有聚类簇中所有目标识别数据点的最小投票值记为初始阈值,将所有聚类簇中所有目标识别数据点的最大投票值记为终止阈值;以初始阈值为起点,步长为1,依次遍历获取阈值,直至到终止阈值为止停止遍历,获取若干阈值;将每个阈值记为参考阈值;
11、对于任意一个参考阈值以及任意一个聚类簇,获取参考阈值下聚类簇的分布识别影响差异值;将所有参考阈值下聚类簇的分布识别影响差异值进行线性归一化,将归一化后的每个分布识别影响差异值记为识别分布差异因子。
12、优选的,所述根据聚类簇内目标识别数据点的分布密集情况以及目标识别类簇面积,得到聚类簇的直线段聚集度,包括的具体方法为:
13、获取聚类簇的目标识别类簇面积;
14、
15、式中,表示聚类簇的直线段聚集度;表示聚类簇内所有目标识别数据点的数量;表示聚类簇内第个目标识别数据点的投票值;表示聚类簇内所有目标识别数据点的投票值的均值;表示聚类簇的目标识别类簇面积;表示以自然常数为底的指数函数。
16、优选的,所述获取聚类簇的目标识别类簇面积,包括的具体方法为:
17、将聚类簇中所有目标识别数据点输入凸包检测算法得到凸包,将凸包的面积记为聚类簇的目标识别类簇面积。
18、优选的,所述根据特征目标识别数据点周围区域内目标识别数据点整体趋向中心的分布情况,以及聚类簇的直线段聚集度,得到特征目标识别数据点的分布影响程度,包括的具体方法为:
19、获取特征目标识别数据点的参考数据区域;
20、根据特征目标识别数据点的参考数据区域内特征目标识别数据点整体趋向中心的分布情况,以及聚类簇的直线段聚集度,得到特征目标识别数据点的分布影响因子;
21、获取所有目标识别数据点的分布影响因子,将所有的分布影响因子进行线性归一化,将归一化后的每个分布影响因子记为分布影响程度。
22、优选的,所述获取特征目标识别数据点的参考数据区域,包括的具体方法为:
23、预设一个窗口大小,将特征目标识别数据点为中心,窗口大小为的窗口区域记为特征目标识别数据点的参考数据区域。
24、优选的,所述根据特征目标识别数据点的参考数据区域内特征目标识别数据点整体趋向中心的分布情况,以及聚类簇的直线段聚集度,得到特征目标识别数据点的分布影响因子,包括的具体方法为:
25、
26、式中,表示特征目标识别数据点的分布影响因子;表示聚类簇中的质心与特征目标识别数据点的欧式距离;表示特征目标识别数据点的参考数据区域内所有目标识别数据点的数量;表示特征目标识别数据点的参考数据区域内第个目标识别数据点的投票值;表示特征目标识别数据点的投票值;表示聚类簇的直线段聚集度;表示取绝对值数。
27、优选的,所述获取参考阈值下聚类簇的分布识别影响差异值,包括的具体方法为:
28、将聚类簇中投票值大于参考阈值的目标识别数据点记为第一目标识别数据点,将聚类簇中投票值小于或等于参考阈值的目标识别数据点记为第二目标识别数据点;根据第一目标识别数据点以及第二目标识别数据点,得到参考阈值下聚类簇的分布识别影响差异值。
29、优选的,所述根据第一目标识别数据点以及第二目标识别数据点,得到参考阈值下聚类簇的分布识别影响差异值,包括的具体方法为:
30、将聚类簇中所有第一目标识别数据点的分布影响程度的累加和记为第一累加和;将聚类簇中所有第二目标识别数据点的分布影响程度的累加和记为第二累加和;将第一累加和与第二累加和的差值的绝对值,记为参考阈值下聚类簇的分布识别影响差异值。
31、优选的,所述根据每个参考阈值下每个聚类簇的识别分布差异因子进行识别监测,包括的具体方法为:
32、对于任意一个参考阈值,将参考阈值下所有聚类簇的识别分布差异因子的均值,记为参考阈值的车道线区分度;将车道线区分度最大的参考阈值记为最佳识别阈值;将最佳识别阈值作为直线公式参数累加投票的阈值,根据直线公式参数累加投票的阈值,通过霍夫变换算法对所有目标识别数据点进行捕获,得到霍夫直线检测结果;将霍夫直线检测结果中的所有直线表示在获取的路况识别监测数据对应的矩阵坐标位置上,并获取最小外接矩形;将最小外接矩形作为候选框输入grabcut算法得到识别结果。
33、本发明的技术方案的有益效果是:通过路况识别监测数据在霍夫空间下对应数据点的分布密集情况,得到识别分布差异因子,自适应调整阈值,完成识别监测;其中根据不同聚类簇内目标识别数据点的分布密集情况以及投票值之间的差异情况,进行阈值遍历,得到每个参考阈值下每个聚类簇的识别分布差异因子,其中识别分布差异因子用于表示参考阈值下各个聚类簇所区分出属于车道线的目标识别数据点的数量,抽取了霍夫空间下属于车道线分布情况的特征,捕获了更多属于车道线的目标识别数据点;本发明通过路况识别监测数据在霍夫空间下对应数据点的分布情况以及对应投票值的差异情况,得到识别分布差异因子,自适应调整阈值,提高了识别车道线的准确性,提高了路况的监测效率。
本文地址:https://www.jishuxx.com/zhuanli/20240731/188436.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表