停车辅助方法及停车辅助装置与流程
- 国知局
- 2024-07-31 21:11:38
本发明涉及一种停车辅助方法及停车辅助装置。
背景技术:
1、在下述专利文献1中,记载了如下的技术:识别并存储目标停车位置的周围的特征点,基于本车辆相对于所存储的特征点的相对位置来计算目标停车位置相对于本车辆的相对位置,基于计算出的相对位置使本车辆自动地移动到目标停车位置。
2、现有技术文献
3、专利文献
4、专利文献1:日本特开2017-138664号公报
5、本发明要解决的课题
6、然而,在目标停车位置与本车辆的相对位置的计算精度较低的情况下,当基于相对位置使本车辆移动时,则有可能给乘员带来不适感。
技术实现思路
1、本发明的目的在于,基于由搭载在本车辆上的传感器检测出的标志物体和目标停车位置与标志物体之间的已知的相对位置关系,在使本车辆移动到目标停车位置时,减轻给乘员带来的不适感。
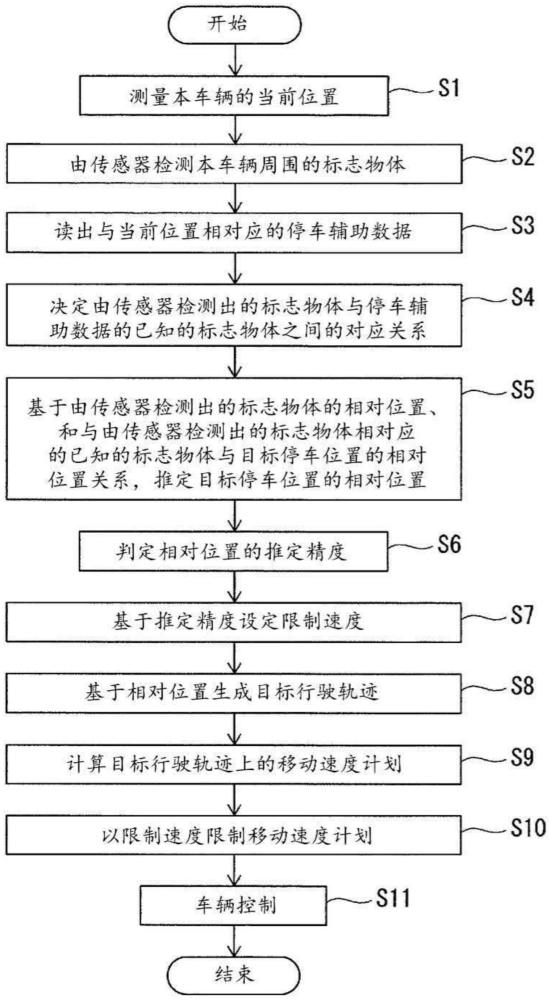
2、在本发明的一方式的停车辅助方法中,通过搭载在本车辆上的传感器检测本车辆周围的标志物体和标志物体相对于本车辆的相对位置即标志物体位置,从存储装置读出预先存储在规定的存储装置中的已知的标志物体和已知的标志物体与目标停车位置之间的相对位置关系,基于由传感器检测出的标志物体位置和已知的标志物体与目标停车位置之间的相对位置关系,推定目标停车位置相对于本车辆的当前位置的相对位置,基于推定出的相对位置,计算从本车辆的当前位置到目标停车位置的相对位置的目标行驶轨迹,判定推定出的相对位置的推定精度,在推定精度低的情况下,将本车辆沿着目标行驶轨迹行驶的移动速度的限制速度限制为比推定精度高的情况低的速度。
3、发明效果
4、根据本发明,在基于由搭载在本车辆上的传感器检测出的标志物体和目标停车位置与标志物体之间的已知的相对位置关系,使本车辆移动到目标停车位置时,能够减轻给乘员带来的不适感。
5、本发明的目的和优点通过使用权利请求的范围所展示的要素及其组合来具体化而实现。上述的一般性描述和以下详细描述都仅是示例和说明性的,并不应该解释为以权利请求的范围的方式限制本发明。
技术特征:1.一种停车辅助方法,其特征在于,
2.如权利要求1所述的停车辅助方法,其特征在于,
3.如权利要求1或2所述的停车辅助方法,其特征在于,
4.如权利要求1~3中任一项所述的停车辅助方法,其特征在于,
5.如权利要求1~4中任一项所述的停车辅助方法,其特征在于,
6.如权利要求1~5中任一项所述的停车辅助方法,其特征在于,
7.如权利要求1~5中任一项所述的停车辅助方法,其特征在于,
8.如权利要求1~7中任一项所述的停车辅助方法,其特征在于,
9.一种停车辅助装置,其特征在于,具备:
技术总结本发明的停车辅助方法中,检测本车辆周围的标志物体和标志物体相对于本车辆的相对位置即标志物体位置(S2),从存储装置读出预先存储在规定的存储装置中的已知的标志物体和已知的标志物体与目标停车位置之间的相对位置关系(S3),基于由传感器检出的标志物体位置和已知的标志物体与目标停车位置之间的相对位置关系,推定目标停车位置相对于本车辆的当前位置的相对位置(S5),基于推定出的相对位置,计算从本车辆的当前位置到目标停车位置的相对位置的目标行驶轨迹(S8),判定推定出的相对位置的推定精度(S6),在推定精度低的情况下,将本车辆沿着目标行驶轨迹行驶的移动速度的限制速度限制为比推定精度高的情况低的速度(S10)。技术研发人员:渡边武史,铃木康启,竹田椋受保护的技术使用者:日产自动车株式会社技术研发日:技术公布日:2024/7/9本文地址:https://www.jishuxx.com/zhuanli/20240731/188799.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表