一种自适应调整姿态的无人机高空清洁装置
- 国知局
- 2024-08-05 11:55:13
本申请涉及无人机,具体涉及一种能够自适应调整姿态的无人机高空清洁装置。
背景技术:
1、随着时代的发展,网络与其他新型行业的兴起,越来越多的行业逐渐被新式科技所替代,一些人工智能技术逐渐走入人们的生活并代替人们进行一些高强度、高危险的繁杂劳务工作。尤其是外楼清洁领域的工作,对于人力的需求仍居高不下,劳动者需要顶着烈日乘坐升降机来回在楼顶与对应楼层之间穿梭更换清洁设备,这无疑大大提高了劳动者工作的危险性、增加了劳动者的工作时间,费时费力。因此市场需要一种能够高效稳定对外墙清洁的设备。
2、相关技术中,中国专利申请公布号cn106859517 a,公开了一种无人机清洁系统,包括储水车、无人机、水电软管、遥控器。储水车包括无人机起落台、水泵和电源;无人机包括毛刷、通水机身、摄像机、控制器、通讯模块和水电软管接口;水电软管包括胶皮、导体、水通道和隔离带。无人机上机身通过水电软管接口与水电软管中的水通道连接。水电软管与无人机连接;摄像机置于机身左下方,连接通信模块和控制器。控制器置于无人机内;通信模块置于无人机内,与控制器相连。相关技术的不足在于该无人机清洁系统需要通过操作人员调整无人机到合适的距离后通过遥控器向无人机发出指令启动水泵,存在操作误差,同时该清洁系统未考虑到其水电软管在清洁时清洁水所产生的反向作用力对无人机稳定性产生的影响。
3、相关技术中,中国专利申请公布号cn107021216 a,清洁高空玻璃的无人机,包括无人机本体、工作平台、清洁系统、负压吸引装置和控制箱,工作平台固定设置于无人机本体下方,清洁系统设置于工作平台上,负压吸引装置设置在工作平台的前端,控制箱设置在所述工作平台上方,所述清洁系统包括喷水装置、机械手臂和清洁装置,所述清洁装置包括多个可灵活调节旋转速度的清洁刷。相关技术的不足在于该清洁高空玻璃的无人机的储水方式采用了一个水箱,这大大增加了无人机的自重,随着时间的推移,蓄水量的减小及恒定的螺旋桨转速将会引起该装置承受不稳定平衡力的作用。
4、本申请克服上述现有技术中的弊端,在此基础上本申请提供一种能够自适应调整姿态的无人机高空清洁装置,通过压力传感器、位移传感器、电机联合作用,张开可开合清洁装置的伸展结构,同时控制四个可独立控制纵向拉力的旋翼的转速并调整其相应姿态角,并由此给出变频水泵所需提供的清洁水的流量,以抵消清洁水喷出时的反作用力,使该装置在工作时能始终保持相对稳定平衡。可开合清洁装置的伸展结构和外接线的运用也大大提升了该结构的清洁效率和工作时间。基于此,需要一种新技术方案。
技术实现思路
1、有鉴于此,本说明书实施例提供以下技术方案:
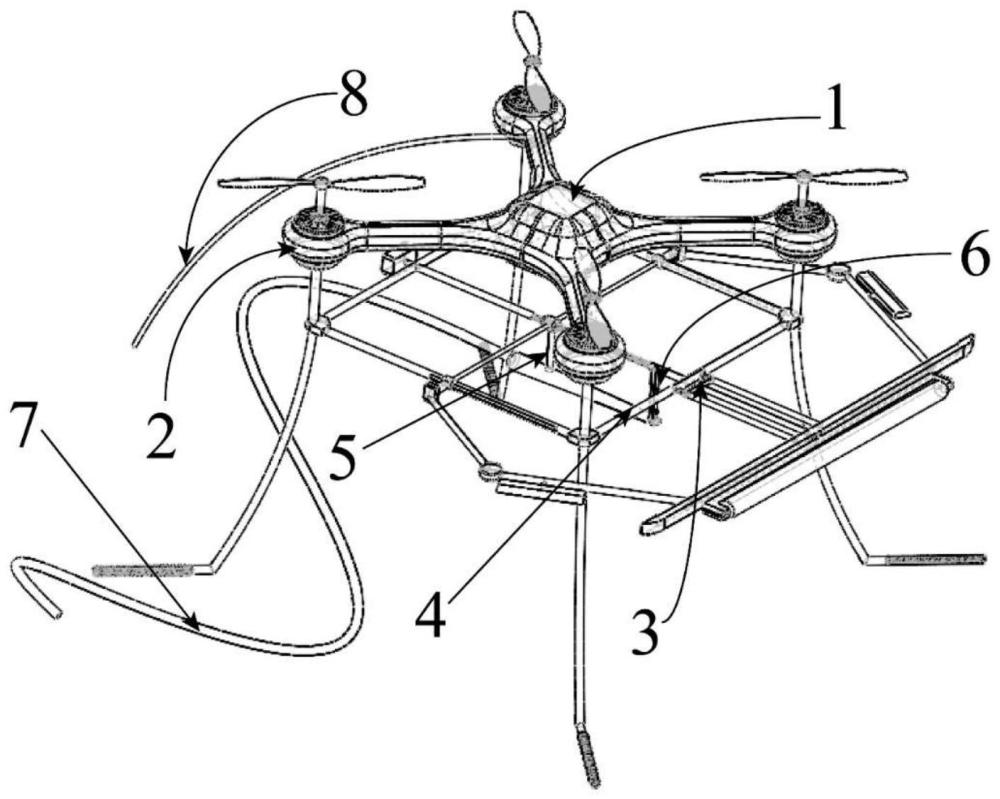
2、本说明书实施例提供一种自适应调整姿态的无人机高空清洁装置,包括无人机主机体、四个可独立控制纵向拉力的旋翼可开合清洁装置的伸展机构、提供清洁水源的喷头、连接喷枪和伸展机构的支杆和转动支臂、接有变频水泵的水管、提供电源的外接线;四个可独立控制纵向拉力的旋翼中心对称布置于无人机主机体四周;可开合清洁装置的伸展机构布置于无人机主体单侧,通过其前端红外线测距仪输出的距离,借由压力传感器、位移传感器联合控制四个可独立控制纵向拉力的旋翼、电机控制其飞行姿态;变频水泵为水管提供合适的流量大小;外接线为其提供电源使其能够长时间在空中作业。
3、本说明书实施例还提供所述的可开合清洁装置的伸展机构的布置方式,其布置于无人机主机体一侧,前侧布置有缓冲垫,其前侧固定有u形架,在u形架端部对称布置有四个红外线测距仪,通过滚轴固定有滚筒与清洁布。所述的缓冲垫中布置有供开合支杆运动的开合滑轨,通过弹性杆、垫片、缓震弹簧及半圆形支架的相互连接与无人机主机体相连。所述的开合支杆通过连接轴器与推进杆相连接,其外部则固定有玻璃刮板。所述的推进杆通过限位器与移动滑块和连接杆相连,连接杆则是固定在构件螺母滑块上。所述的移动滑块嵌于滑杆的移动滑轨内。
4、本说明书实施例还提供四个可独立控制纵向拉力的旋翼,环绕着支杆内部中心对称布置有多个姿态调整器,该姿态调整器安置于其对应的橡胶卡口内。所述的支杆外包裹有橡胶摇杆,在每个支杆的顶部布置有两个叶片。
5、本说明书实施例还提供一种控制姿态的方法,本发明的基本原理是:通过求解实时装置的自重求得四个可独立控制纵向拉力的旋翼所需的力的大小,
6、该控制姿态方法中相对于原点的坐标为τ=[xyz],姿态角θ=其转动角速度ω=[ωxωyωz],具体表示如下所列:
7、
8、其中,表示四个可独立控制纵向拉力的旋翼的叶片转速,ct是推力系数,cm是扭矩系数,d是飞行器质心到上述示意图地理坐标轴中心o的位置,f是螺旋桨的总升力。利用无人机的姿态角可将其机体坐标系完成向上述地理坐标系的转换即:
9、
10、由此四个可独立控制纵向拉力的旋翼能够实时调整其姿态角。
11、本说明书实施例还提供一种控制水流的原理,所述的接有变频水泵的水管提供的水流大小可由四个可独立控制纵向拉力的旋翼沿喷头反方向的力f′换算而来。
12、
13、变频器与相对转速大致关系为:
14、ηvfd=50.87+1.283x-0.0142x2+5.834×10-5x3
15、
16、其中,η1是变频水泵装置效率,ηb是水泵效率,ηm是水泵效率,ηvfd是水泵效率,ad是喷头的截面积,v是喷头的喷出水流的速度,h是水泵的扬程,g是水泵流量,ρ是水的密度,g是重力加速度,x是实际频率与额定频率的百分比。
17、本说明书实施例还提供一种调整清洁水大小的方法,所述的水管装有水平仪,其工作时可看作始终保持水平方向进行清洁工作,因此无人机主机体与水平方向的夹角为θ,四个可独立控制纵向拉力的旋翼所提供的升力近似等效为一个整体的升力f,其喷水方向反方向上的力可近似等效为fsinθ,θ可由改变叶片的转速进行调整。
18、本说明书实施例还提供可开合清洁装置的伸展机构的启动方式,将螺母滑块布置于螺杆上,该螺母滑块的动能由电机所提供,螺母滑块的下部通过支杆与转动支臂和接有变频水泵的水管相连。
19、与现有技术相比,本说明书实施例采用的上述至少一个技术方案能够达到的有益效果至少包括:首先该高空清洁装置能够通过自身的飞行姿态的调整能够有效平衡水管的反向冲击力;其次可开合清洁装置的伸展机构在非工作时具有占地小、重量轻的优势,在电机、螺杆、螺母滑块的联合作用下在能改变支杆与喷头之间的夹角的同时,该机构的展开能够增大整体的清洁面积提高其作业效率;最后,通过变频水泵与姿态控制方程的联动推导,确定输出流量的数值,通过控制叶片转速的大小实现了清洁水流量由小到大的变化趋势,并最终确保了喷口中清洁水稳定输出,而不会对无人机稳定性产生过大的影响。
技术特征:1.一种自适应调整姿态的无人机高空清洁装置,其特征在于,包括:无人机主机体(1)、四个可独立控制纵向拉力的旋翼(2)可开合清洁装置的伸展机构(3)、提供清洁水源的喷头(4)、连接喷枪和伸展机构(3)的支杆(5)和转动支臂(6)、接有变频水泵的水管(7)、提供电源的外接线(8);四个可独立控制纵向拉力的旋翼(2)中心对称布置于无人机主机体(1)四周;可开合清洁装置的伸展机构(3)布置于无人机主体(1)单侧,通过其前端红外线测距仪(301)输出的距离,借由压力传感器、位移传感器联合控制四个可独立控制纵向拉力的旋翼(1)、电机(321)控制其飞行姿态;变频水泵为水管(7)提供合适的流量大小;外接线(8)为其提供电源使其能够长时间在空中作业。
2.根据权利要求1所述的自适应调整姿态的无人机高空清洁装置,其特征在于:
3.根据权利要求1所述的自适应调整姿态的无人机高空清洁装置,其特征在于:
4.根据权利要求2所述的自适应调整姿态的无人机高空清洁装置,其特征在于:无人机的自适应调整姿态通过求解实时装置的自重求得四个可独立控制纵向拉力的旋翼(2)所需的力的大小,
5.根据权利要求1所述的自适应调整姿态的无人机高空清洁装置,其特征在于:
6.根据权利要求2所述的自适应调整姿态的无人机高空清洁装置,其特征在于:
7.根据权利要求5所述的自适应调整姿态的无人机高空清洁装置,其特征在于:
技术总结本申请提供一种能够自适应调整姿态的无人机高空清洁装置,由无人机主机体、四个可独立控制纵向拉力的旋翼、可开合清洁装置的伸展机构、提供清洁水源的喷头、连接喷枪和伸展机构的支杆和转动支臂、接有变频水泵的水管、提供电源的外接线组成;四个可独立控制纵向拉力的旋翼中心对称布置于无人机主机体四周,通过压力传感器、位移传感器的协同作用控制其工作时的姿态;可开合清洁装置的伸展机构布置于无人机主体单侧,通过连接杆、转轴的联合运动达到加大清洁面积的作用;变频水泵为水管提供合适的流量大小;外接电源线使其能够长时间在空中作业。技术研发人员:黄莉,周映彤受保护的技术使用者:浙江财经大学技术研发日:技术公布日:2024/8/1本文地址:https://www.jishuxx.com/zhuanli/20240802/260101.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。