预焙阳极在线炭碗自动填充装备及方法与流程
- 国知局
- 2024-08-05 12:04:13
本发明涉及预焙阳极在线炭碗自动填充,尤其涉及一种预焙阳极在线炭碗自动填充装备及方法。
背景技术:
1、在电解铝生产过程中,需要消耗大量的阳极炭块,生阳极在焙烧前须对炭碗进行必要的填充,根据填充工艺要求,先在底部铺设少量锯末,然后加满混合料,混合料由锯末和冶金焦加水调配而成;最后将填充料进行压实。现有的炭碗填充方式,存在诸多缺点,具体如下:
2、1.人工填充,产生人工成本,劳动强度高,环境差,效率低。
3、2.现有的预焙阳极自动填料机,大料仓储存湿混料,推料油缸进行自动填料,冲压油缸进行炭碗的捣实。但是没有对炭碗进行定位,需要人工的视觉观察。
4、3.现有技术使用曲柄连杆机构来实现自动捣实操作。其末端设计有压板,整个装置可以移动,但是定位精度低,需要人工来判定是否可以工作,也仅为半流程、半自动化设备等。
5、4.生产线上存在两种块型的时候,其他自动填充方式就会存在结构复杂,效率低的情况。
6、5.通过块型选择对炭碗进行定位,在装炉配装块的情况下,就会频繁切换块型,增加操作难度。
7、在背景技术部分中公开的上述信息仅仅用于增强对本发明背景的理解,因此可能包含不构成本领域普通技术人员公知的现有技术的信息。
技术实现思路
1、本发明的目的是提供一种预焙阳极在线炭碗自动填充装备及方法,解决了现有自动化程度低,劳动强度高,定位精度低且复杂,适应块型单一的问题。
2、为了实现上述目的,本发明提供如下技术方案:
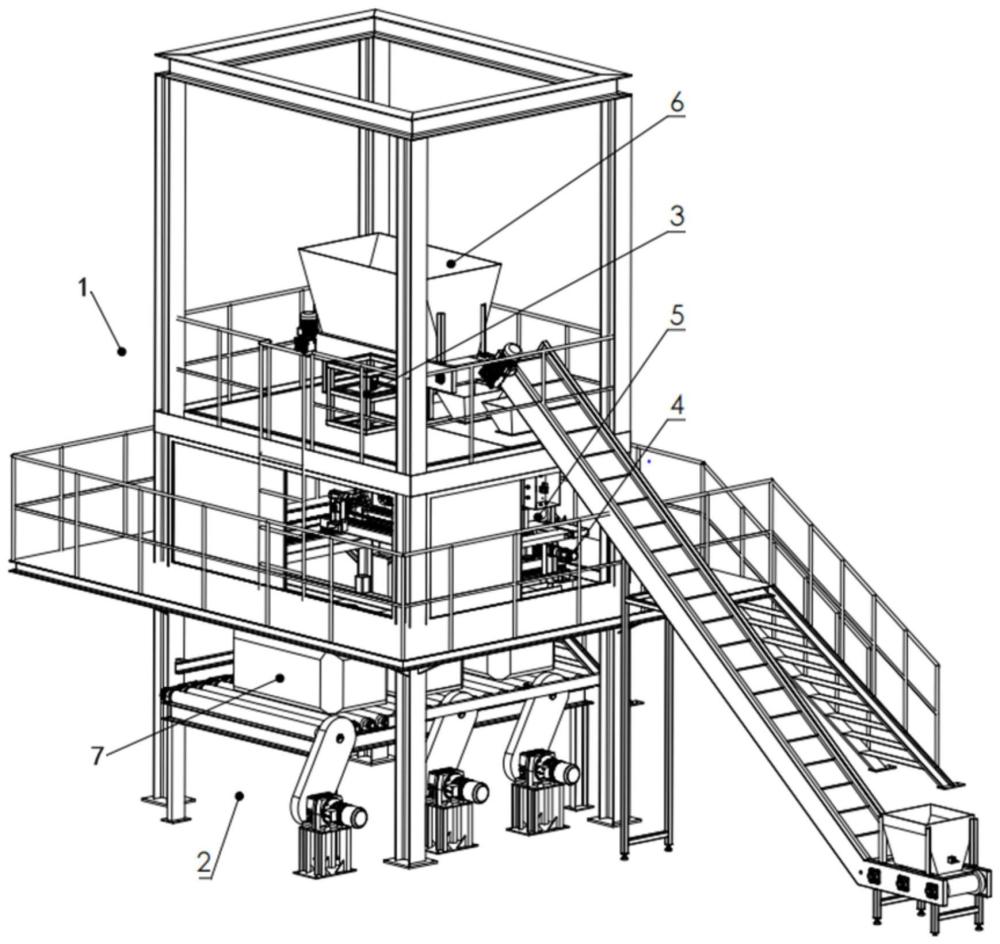
3、本发明的一种预焙阳极在线炭碗自动填充装备包括:
4、框架部,其包括中空结构以及位于中空结构上的平台一和平台二,所述平台二位于平台一上方;
5、输送部,其穿过所述中空结构以在线输送带有炭碗的预焙阳极于所述平台一的下方的填充区域,输送部包括经由第一输送驱动单元驱动的第一部分、经由第二输送驱动单元驱动的第二部分和经由第三输送驱动单元驱动的第三部分,所述填充区域位于所述第二部分且所述输送部的输送表面保持水平;
6、定位部,其安装于所述中空结构,所述定位部包括,
7、第一限位检测单元,其位于第二部分两侧且靠近第三部分的一端,当第一限位检测单元检测预焙阳极离开第一部分发出第一到达信号,第一输送驱动单元停止驱动第一部分运动,同时第二输送驱动单元停止驱动第二部分运动,
8、第二限位检测单元,其位于第三部分两侧其远离第二部分的另一端,当填充区域内的预焙阳极炭碗填充完毕后,且第二限位检测单元未检测到有预焙阳极时,第二输送驱动单元驱动第二部分,同时第三输送驱动单元驱动第三部分,预焙阳极向前移动完成一个填充周期,当第二限位检测单元检测预焙阳极离开第二部分并发出第二到达信号,自动填充装备进入下一个填充周期,
9、视觉相机,其位于平台二的上端面的固定框内,视觉相机的视野覆盖填充区域内预焙阳极的所有炭碗以测量炭碗的位置信息和尺寸信息;
10、运动部,其位于所述平台一的上端面,所述运动部包括,
11、x导轨框,其位于所述平台一上端,
12、x直线导轨,其固定于x导轨框的两侧,其具有x伺服驱动单元,
13、y导轨框,其固定于x直线导轨的滑块轴承上以经由x伺服驱动单元带动在x直线导轨上做直线运动,
14、y直线导轨,其固定于y导轨框的两侧,其具有y伺服驱动单元,y直线导轨垂直于x直线导轨;
15、填充部,其固定于y直线导轨的滑块轴承上经由y伺服驱动单元驱动沿y方向做直线运动,填充部经由x伺服驱动单元和y驱动单元共同驱动,所述填充部在平面上运动到所述填充区域内的任意位置,所述填充部包括,
16、填充机固定板,其固定于所述y直线导轨的滑块轴承上,
17、双向填充机,其固定于所述填充机固定板上,双向填充机包括具有锯末驱动单元的用于输送锯末的锯末输送部分和具有混合料驱动单元用于输送混合料的混合料输送部分,锯末输送部分和混合料输送部分具有共同的填充机下料端,
18、锯末填充仓,其固定于所述锯末输送部分上端面以容纳锯末,所述锯末填充仓上端装有锯末料位检测单元,用于检测锯末料仓的料位,
19、混合填充仓,其固定于所述混合料输送部分上端面以容纳混合料,所述混合填充仓上端装有混合料位检测单元,用于检测混合填充仓的料位,
20、填充料斗,固定于填充机固定板的下端面,其上端连通所述填充机下料端,下端设有出料口,
21、压实盘,其经由压实气缸和压实振动器以振动压实炭碗,所述压实气缸固定连接所述填充机固定板,压实振动器一端连接所述压实气缸,另一端连接压实盘;
22、供料部,其供给补充所述锯末填充仓的锯末和混合填充仓的混合料,所述供料部包括,
23、锯末输送机,其安装于所述平台二的上端面,配有锯末储料仓,锯末输送机前端设有输送机下料端,填充部处于原点时与所述锯末填充仓相对,
24、混合提升机,其安装于所述框架部且于锯末输送机相对的一侧,混合提升机下部水平部分固定于地面,其上端面安装有混合储料仓,混合提升机上部固定于平台二且设有提升机下料端,填充部处于原点时与所述混合填充仓相对;
25、控制系统,其一端连接第一限位检测单元、第二限位检测单元和视觉相机,另一端连接第一输送驱动单元、第二输送驱动单元、第三输送驱动单元、x伺服驱动单元、y伺服驱动单元、所述锯末驱动单元、混合驱动单元、压实气缸和压实振动器,
26、响应于第一到达信号,控制系统同时发送第一停止信号到第一输送驱动单元和第二输送驱动单元以停止驱动第一部分和第二部分运动,所述炭碗待填充预焙阳极处于第二部分的填充区域,视觉相机工作,获取炭碗的位置信息和尺寸信息并传递给控制系统,基于所述位置信息,控制系统发送运动信号到x伺服驱动单元和y伺服驱动单元使得所述下料口和压实盘分别对准预焙阳极上的炭碗,所述控制系统分别控制锯末和混合料的卸料量和卸料次数以及压实气缸和压实振动器的压实作用时间。
27、所述的一种预焙阳极在线炭碗自动填充装备中,控制系统启动后,所述第一输送驱动单元驱动第一部分运动,同时所述第二输送驱动单元驱动第二部分运动,当第一限位检测单元检测最前端第一块预焙阳极离开第一部分并发出第一到达信号,第一输送驱动单元停止驱动第一部分运动,同时,第二输送驱动单元停止驱动第二部分运动,这时第二块及后面的预焙阳极处于第一部分。
28、所述的一种预焙阳极在线炭碗自动填充装备中,当压实盘压实完最后一个炭碗并由压实气缸收缩至初始状态,且第二限位检测单元未检测到预焙阳极处于第三部分,所述控制系统发送启动信号到第二输送驱动单元和第三输送驱动单元以驱动第二部分和第三部分运动,当预焙阳极到达第二限位检测单元,响应于第二到达信号,控制系统进行下一个预焙阳极的炭碗填充周期。
29、所述的一种预焙阳极在线炭碗自动填充装备中,所述填充部位于原点处,锯末料位检测单元检测到锯末填充仓需要补料,锯末输送机启动,将锯末储料仓内的锯末送入锯末填充仓内,直到锯末料位检测单元发出料满信号,锯末输送机停止输送锯末,同时,混合料位检测单元检测到混合填充仓需要补料,混合提升机启动,将混合储料仓内的混合料提升至混合填充仓内,直到混合料位检测单元发出料满信号,混合提升机停止提升混合料。
30、所述的一种预焙阳极在线炭碗自动填充装备中,所述第一部分、第二部分和第三部分别为多个托辊组成的在线输送部。
31、所述的一种预焙阳极在线炭碗自动填充装备中,第一限位检测单元和/或第二限位检测单元包括光电限位器。
32、所述的一种预焙阳极在线炭碗自动填充装备中,出料口的开口尺寸小于所述炭碗的开口尺寸。
33、所述的一种预焙阳极在线炭碗自动填充装备中,所述框架部为钢结构框架。
34、所述的一种预焙阳极在线炭碗自动填充装备中,x导轨框和y导轨框均由材质为q235的方管焊接而成。
35、一种预焙阳极在线炭碗自动填充装备的填充方法包括以下步骤,
36、所述填充部位于原点处,锯末料位检测单元检测到锯末填充仓需要补料,锯末输送机启动,将锯末储料仓内的锯末送入锯末填充仓内,直到锯末料位检测单元发出料满信号,锯末输送机停止输送锯末,
37、混合料位检测单元检测到混合填充仓需要补料,混合提升机启动,将混合储料仓内的混合料提升至混合填充仓内,直到混合料位检测单元发出料满信号,混合提升机停止提升混合料,
38、输送部启动,所述第一输送驱动单元驱动第一部分运动,同时,所述第二输送驱动单元驱动第二部分运动,预焙阳极组运动,当第一限位检测单元检测最前端第一块预焙阳极离开第一部分并发出第一到达信号,第一输送驱动单元停止驱动第一部分运动,同时,第二输送驱动单元停止驱动第二部分运动,这时第二块及后面的预焙阳极处于第一部分,
39、视觉相机对处于填充区的预焙阳极进行检测,获取炭碗的坐标信息和尺寸信息,同时,在锯末料位检测单元和混合料位检测单元都检测到料满信号后,经由x伺服驱动单元和y伺服驱动单元的共同驱动,填充部移动,直至下料口正对待填充预焙阳极的第一个炭碗停止,锯末驱动单元启动,双向填充机锯末输送部分将锯末填充仓内的锯末输向填充机下料端,经由填充料斗进入炭碗,满足填充量后停止,接着混合驱动单元启动,双向填充机混合料输送部分将混合填充仓内的混合料输向填充机下料端,经由填充料斗进入炭碗,满足填充量后停止,填充区预焙阳极的第一个炭碗锯末和混合料填充完后,经由x伺服驱动单元和y伺服驱动单元的共同驱动,填充部移动,直至压实盘正对填充完的炭碗停止,经由压实气缸和压实振动器对炭碗进行压实,
40、压实气缸收缩后且第二限位检测单元未检测到有预焙阳极时,第二输送驱动单元驱动第二部分,同时,第三输送驱动单元驱动第三部分,预焙阳极向前移动,当第二限位检测单元检测预焙阳极离开第二部分并发出第二到达信号,系统重复下一个填充周期,第二块预焙阳极进入填充周期。
41、在上述技术方案中,本发明提供的一种预焙阳极在线炭碗自动填充装备及方法,具有以下有益效果:本发明通过定位部能够自动准确定位和调整炭碗、填充部和压实盘的相对位置,能够进行锯末料和混合料的准确填充,填充和压实全自动且定位精度高,能够对多块型预焙阳极进行自动填充压实。
本文地址:https://www.jishuxx.com/zhuanli/20240802/260924.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表