一种有框架立体定向系统的注册方法、系统及存储介质
- 国知局
- 2024-08-08 17:04:04
本发明属于图像处理,具体涉及一种有框架立体定向系统的注册方法、系统及存储介质。
背景技术:
1、当前有框架立体定向系统的注册方法在技术层面已非常成熟,如leksell立体定向系统等,其精准定位和路径规划等优势得到广泛应用和验证。这类系统通常包含精密的机械结构和强大的软件支持。该技术最重要的特征是将参照系设置在颅内感兴趣区的两侧,医生以ct断层上n线形成的标记点构建框架各基准平面,通过测算感兴趣点到三个基准面的距离,推导出靶点在框架内的坐标。该定位技术准确可靠,性价比高,既适合开展高精尖的功能性神经外科手术,也适合常见的脑出血等微创手术,其疗效好费用低。但是该技术的便利性差,流程冗长且繁琐。具体表现在:术前需要在病房安装立体定向框架,局麻下操作对患者造成剧烈疼痛与不适;安装框架后,还需要送患者ct扫描,搬运过程繁琐且耗时,存在多个风险点;定位扫描后,直至手术结束前,固定在头颅上的框架均不可滑移,否则将导致扫描数据全部失真,这些缺陷不仅对医生有更高技术要求,也显著增加了危重和肥胖患者的手术风险。
2、为解决前述便利性问题,后期出现的无框架立体定向技术(包括导航、神经外科机器人),采用另一种技术路径:将患者额面部体表轮廓作为参照物,并通过偏置于头颅一侧的参考架和红外摄像等构建为参照系,在头颅实体与图像坐标系之间建立映射关系,采集的体表点常高达“500”的点云数据。虽然许多产品将“注册精度”标记到“丝米和微米”级,但临床实际的“定位误差”常达数毫米甚至十多毫米,其根本原因是它的参照系偏置于头颅一侧,可能“失之毫厘,谬之千里”,即使“丝米和微米”级的注册误差,也难以达到传统有框架定位的高精度和可靠性;近期国产机器人出现的“骨钉方案”:术前在患者颅骨上固定5-6个钢性骨钉,然后行ct定位扫描,该方案虽然提高了配准精度,但又返回到传统有框架技术的老路,不仅增加患者痛苦,还挤占了手术区域,限制医生选择切口位置的灵活性并增加术区污染的风险;这种改进措施显然不符合临床医生的期待;另外,无框架立体定向技术要求患者头颅与参照系相互锁定的机械环节太多,间隙稍大即会晃动。与有框架立体定向对比,无框架立体定向采用的技术路径导致定位精度与可靠性均有损失,而且关键部件的成本较高。
3、基于上述原因,迫切需要发明一种新的注册技术,能够将无框架立体定向的便利性与有框架立体定向的传统优势融为一体,实现“鱼与熊掌兼得”。在保持有框系统的高精度前提下,实现无框系统的便利性,从而降低手术风险和手术难度。
技术实现思路
1、为解决上述问题,本发明提供了一种有框架立体定向系统的注册方法、系统及存储介质,以解决现有技术中的问题。
2、本发明所述的注册方法,既非有框架立体定向的n标记线参照,也非无框架立体定向的坐标系映射。而是另辟蹊径,充分利用有框架立体定向设备的机械原理,所需手术参数的计算全部在图像坐标系内完成。具体的,本发明基于关键体表点的匹配,创造性的在ct坐标系中建立框架坐标系的三个基准平面(统称为正中面),完成注册。基于该注册方式,ct坐标系中感兴趣点到各正中面的距离,等于框架坐标系中感兴趣点到基准平面的距离(即:感兴趣点的框架坐标)。该技术解决了传统有框架流程中主要问题,采用无框架立体定向相同的流程,术前准备全部在手术室内完成:与传统无框架技术一致,先全麻插管,后安装定向仪框架;在框架系统内采集关键体表点的坐标信息,导入软件系统进行注册和手术规划。既保留了有框架技术的传统优势,又兼备了无框架技术的便利性;由于采集关键体表点的坐标信息并不需要特殊的零部件,廉价易得。
3、为了达到上述的发明目的,本发明提出一种有框架立体定向系统的注册方法,包括:
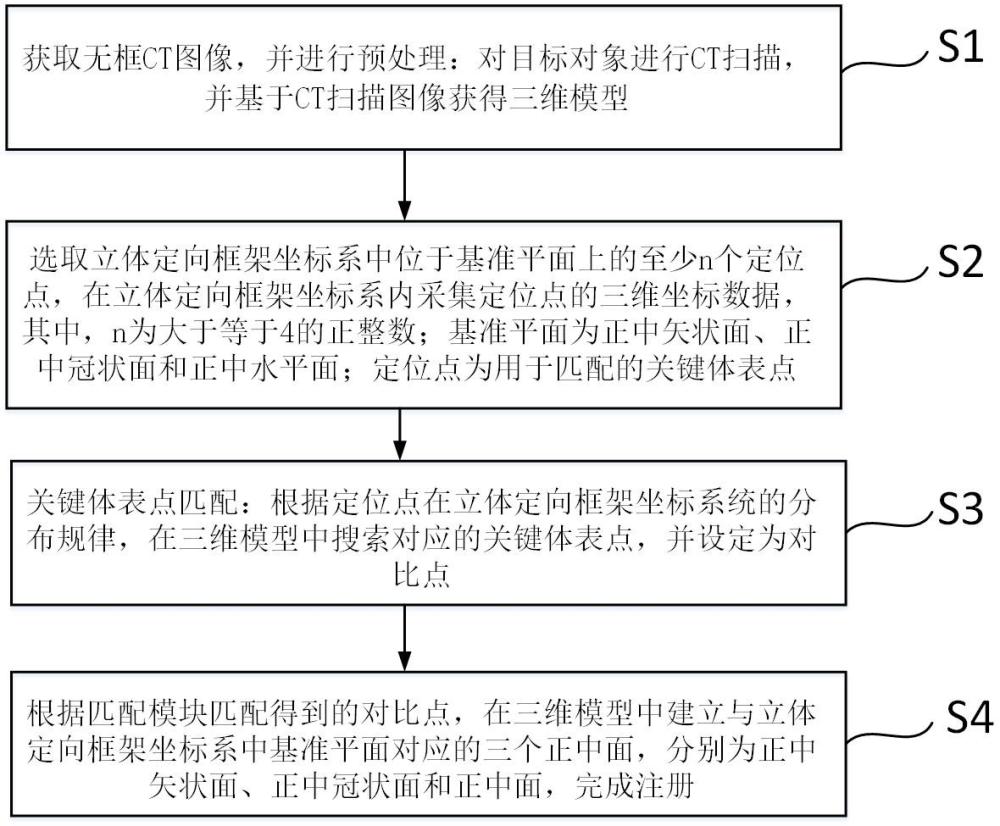
4、s1:获取无框ct图像,并进行预处理:对目标对象进行ct扫描,并基于ct扫描图像获得三维模型;
5、s2:选取立体定向框架坐标系中位于基准平面上的至少n个定位点,在立体定向框架坐标系内采集所述定位点的三维坐标数据,其中,n为大于等于4的正整数;所述基准平面为正中矢状面、正中冠状面和正中水平面;所述定位点为用于匹配的关键体表点;
6、s3:所述关键体表点匹配:根据所述定位点在立体定向框架坐标系统的分布规律,在所述三维模型中搜索对应的关键体表点,并设定为对比点;
7、s4:根据匹配模块匹配得到的对比点,在所述三维模型中建立与所述立体定向框架坐标系中基准平面对应的三个正中面,分别为正中矢状面、正中冠状面和正中面,完成注册。
8、在实际操作时,读取病灶特征在ct坐标系中的坐标信息,并设定为感兴趣点,以s4获得的三个正中平面作为立体定向框架的等效基准面,在图像坐标系内,计算感兴趣点到平面的距离,换算出框架内该点的框架坐标,完成有框架立体定向仪的靶点定位。
9、进一步地,s1包括以下步骤:
10、基于连续薄层全头颅扫描获取目标对象的扫描图像,将所有扫描图像组合并设定为第一图像集;连续薄层全头颅扫描过程中采用的角度和参数定义为预设角度和扫描参数。
11、分别提取所述第一图像集中所有所述扫描图像的边缘形状和第一特征点,获取所述第一特征点的二维坐标,建立匹配模型,基于所述匹配模型判断不同的扫描图像中是否存在与所述第一特征点对应的匹配点,若存在,则抽取所述第一特征点的任一匹配点并设定为匹配特征点,获取所述匹配特征点的二维坐标,若不存在,则剔除所述第一特征点,基于所述第一特征点和所述匹配特征点的二维坐标生成所述第一特征点的三维坐标,组合所有三维坐标并重建所述目标对象的三维模型;
12、将所述三维模型包含的所述第一特征点设定为待分析特征点,建立神经网络模型,所述神经网络模型将所述待分析特征点分类并提取标准特征点,基于所述标准特征点和所述三维模型生成所述目标对象的标准模型。
13、进一步地,生成所述第一特征点的三维坐标包括以下步骤:
14、基于第一公式生成第j个第一特征点的三维坐标,所述第一公式为:,其中,为所述第j个第一特征点对应的所述扫描图像的扫描参数,为所述第j个第一特征点的比例变化参数,为所述第j个第一特征点的二维坐标,j为1至j的正整数,j为所述第一特征点的数量,、和分别为所述第j个第一特征点的三维坐标对应的数值,和分别为所述第j个第一特征点的二维坐标对应的数值。
15、进一步地,所述比例变化参数的计算方法为:
16、将所述匹配特征点和所述第一特征点的二维坐标分别代入第二公式中,并基于组合等式求解方法计算所述第j个第一特征点的比例变化参数,所述第二公式为:,,其中,为所述匹配特征点的二维坐标,为所述匹配特征点对应的所述扫描图像的扫描参数,为所述匹配特征点的比例变化参数,和分别为所述匹配特征点的二维坐标对应的数值。
17、进一步地,所述判断不同的扫描图像中是否存在与所述第一特征点对应的匹配点包括以下步骤:
18、所述匹配模型分别获取所述第一特征点的全局特征量和局部特征量,连接所述全局特征量和所述局部特征量以生成组合特征量,为所述组合特征量设置特征标签,基于所述预设角度在任意两个所述扫描图像中均抽取一个所述第一特征点,组成特征点对,基于所述特征标签获取所述特征点对的相似度,若存在所述相似度大于第一阈值,则判断所述特征点对中两个第一特征点匹配,并在同一所述第一特征点组成的所述特征点对中,将最大相似度对应的所述特征点对中另一个所述第一特征点设定为所述匹配特征点,否则,剔除所述特征点对;
19、其中,基于预设分辨率获取多个包含所述第一特征点的特征图组,基于所述第一特征点的二维坐标分别获取所述特征图组的特征向量,将所有特征向量设定为所述全局特征量。
20、进一步地,重建所述目标对象的三维模型包括:
21、基于所述二维坐标获取任一所述扫描图像中所述第一特征点与所述边缘形状的最小距离,将所述最小距离小于第二阈值的所述第一特征点设定为第二特征点,建立重建坐标系,基于所述第二特征点的三维坐标将所有第二特征点汇总至所述重建坐标系中,并生成立体点图,将所述立体点图设定为所述三维模型。
22、进一步地,提取所述标准特征点包括以下步骤:
23、所述神经网络模型包括特征提取层和特征分类层,所述特征提取层将所述待分析特征点划分为重叠的局部区域,将所述局部区域基于预设的嵌套分区重复划分以生成多组局部特征图,至所述待分析特征点汇集并生成全局特征图,将所述全局特征图包含的所述待分析特征点设定为所述标准特征点;
24、所述特征分类层基于预设的层次结构将所述标准特征点分类为所述三维模型的空间特征,基于所述空间特征将所述标准特征点在所述重建坐标系中重新绘制以生成所述目标对象的标准模型。
25、在操作时,基于n个对比点和n个关键体表点的对应关系,在ct坐标系中计算病灶特征到立体定向框架坐标系的基准位置。
26、具体包括以下步骤:
27、定位所述目标对象使用立体定向框架的关键体表点,基于所述立体定向框架坐标系获取所述关键体表点的位置信息,基于所述位置信息将所述关键体表点映射在标准模型中,并获取所述关键体表点相匹配的对比点,基于所述对比点的位置坐标在所述标准模型中生成与所述立体定向框架坐标系的所述基准平面相匹配的三个所述正中面;
28、其中,生成所述正中面包括以下步骤:
29、将所有关键体表点两两连接构建定位体,将所述关键体表点设定为所述定位体的表面顶点,将任意两个关键体表点之间的连线设定为所述定位体的端点线,基于所述标准特征点的三维坐标将所述定位体在所述标准模型中旋转移动,获取所述表面顶点与对应的最近标准特征点之间的第一距离,累加所有第一距离生成距离和,将最小距离和对应的所述标准特征点设定为所述对比点,将所述对比点对应的三维坐标设定为第一坐标;
30、构建平面选取框,在所述定位体中旋转移动所述平面选取框,旋转移动至所述对比点与所述平面选取框的垂直距离最小,且所述平面选取框包含的所述对比点的数量大于等于预设数量,将所述平面选取框旋转移动后对应的平面设定为所述正中面,基于互相垂直的两个正中面构建坐标系,设定为ct坐标系。
31、其中,获取所述基准位置包括以下步骤:
32、基于预设像素值获取三维模型的病灶特征,并设定为感兴趣点,基于所述正中面获取所述对比点在所述ct坐标系中的第二坐标,将所述对比点与所述关键体表点一一对应,基于所述关键体表点的位置信息和所述对比点的第二坐标,计算在所述ct坐标系中所述感兴趣点与任一所述基准平面之间的第二距离,基于所有所述第二距离生成所述感兴趣点到所述立体定向框架坐标系的基准位置。
33、本发明还提供了一种有框架立体定向系统的注册系统,该系统用于实现上述所述的一种有框架立体定向系统的注册方法,该系统主要包括:
34、图像处理模块,获取无框ct图像,并进行预处理:对目标对象进行ct扫描,并基于ct扫描图像获得三维模型;
35、特征提取模块,选取立体定向框架坐标系中位于基准平面上的至少n个定位点,在立体定向框架坐标系内采集所述定位点的三维坐标数据,其中,n为大于等于4的正整数;所述基准平面为正中矢状面、正中冠状面和正中水平面;所述定位点为用于匹配的关键体表点;
36、匹配模块,所述关键体表点匹配:根据所述定位点在立体定向框架坐标系统的分布规律,在所述三维模型中搜索对应的关键体表点,并设定为对比点;
37、注册模块,根据匹配模块匹配得到的对比点,在所述三维模型中建立与所述立体定向框架坐标系中基准平面对应的三个正中面,分别为正中矢状面、正中冠状面和正中面,完成注册。
38、本发明还提供一种计算机存储介质,计算机存储介质存储有程序指令,其中,在所述程序指令运行时控制所述计算机存储介质所在设备执行上述所述的一种有框架立体定向系统的注册方法。
39、与现有技术相比,本发明的有益效果至少如下所述:本定位精度与有框架立体定向的误差已能稳定控制在1mm以内,真实实现了“患者无痛无风险、医生不累不耗时”的良好效果。
本文地址:https://www.jishuxx.com/zhuanli/20240808/272154.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表