一种基于ORCA的轨道交通路径规划方法、装置及可读介质
- 国知局
- 2024-08-08 17:04:03
本发明涉及多智能体,具体涉及一种基于orca的轨道交通路径规划方法、装置及可读介质。
背景技术:
1、在轨道交通运营中,如何有效地管理复杂铁路网络上的密集交通,这是全球许多运输和物流公司面临的现实问题。这一个具有挑战性的任务,解决这一问题的方法大致可以分为集中式和分散式两种。集中式方法假设存在一个中央控制器,它拥有关于所有列车和环境的所有信息,并且可以与列车进行通信。控制器产生完整的路径规划,然后让列车执行它。控制器可以基于全局信息对整个铁路网络进行优化,从而最大程度地提高系统的效率和安全性,可以对所有列车的行驶路径进行协调,避免冲突和拥堵,确保列车之间的安全距离和流畅的运行。但是集中式方法也存在缺点,如果中央控制器出现故障,整个系统的运行将受到影响,可能导致系统瘫痪或部分运行不正常。需要大量的通信和数据传输,成本也相对较高。在分散式方法中,当没有中央控制器存在或是列车的观察和通信能力有限时,每个列车通常会单独规划其路径并在执行期间依赖于避免碰撞机制。每辆列车独立地规划自己的路径,不需要中央控制器的干预,具有较高的独立性。分散式方法通常需要较少的通信和数据传输,对通信网络和基础设施的要求较低,成本相对较低。相对的,分散式方法只能根据局部信息进行决策,缺乏全局的优化视角,可能导致局部最优解而非全局最优解。列车之间相互独立决策,可能出现冲突甚至死锁。
2、在实际铁路调度系统中,单独采用集中式或分散式方法可能会面临一些挑战。例如,在铁路网络规模较大、交通密度较高的主干线上,集中式调度可能会更有效地实现全局优化和协调,但对通信和数据传输的要求较高,同时存在单点故障的风险。而在边缘地区或者交通密度较低的支线上,分散式调度可能更适合,能够降低通信成本和提高系统的灵活性,但缺乏全局优化和协调。
技术实现思路
1、本技术的目的在于针对上述提到的技术问题提出一种基于orca的轨道交通路径规划方法、装置及可读介质。
2、第一方面,本发明提供了一种基于orca的轨道交通路径规划方法,包括以下步骤:
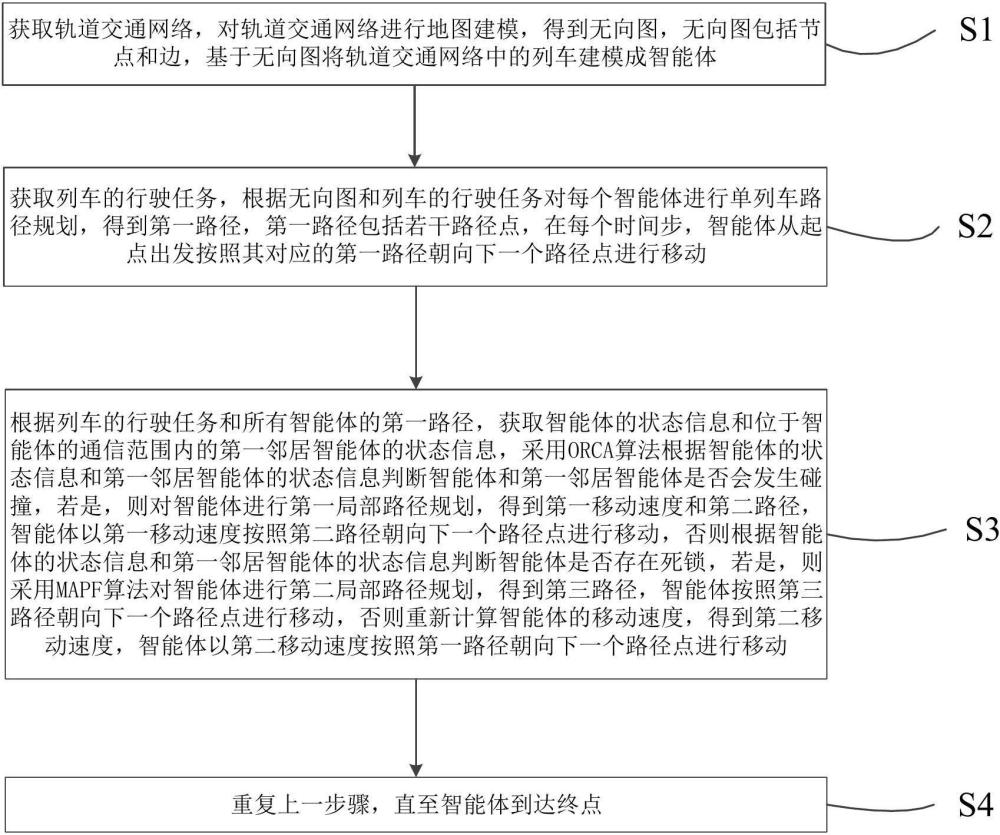
3、获取轨道交通网络,对轨道交通网络进行地图建模,得到无向图,无向图包括节点和边,基于无向图将轨道交通网络中的列车建模成智能体;
4、获取列车的行驶任务,根据无向图和列车的行驶任务对每个智能体进行单列车路径规划,得到第一路径,第一路径包括若干路径点,在每个时间步,智能体从起点出发按照其对应的第一路径朝向下一个路径点进行移动;
5、根据列车的行驶任务和所有智能体的第一路径,获取智能体的状态信息和位于智能体的通信范围内的第一邻居智能体的状态信息,采用orca算法根据智能体的状态信息和第一邻居智能体的状态信息判断智能体和第一邻居智能体是否会发生碰撞,若是,则对智能体进行第一局部路径规划,得到第一移动速度和第二路径,智能体以第一移动速度按照第二路径朝向下一个路径点进行移动,否则根据智能体的状态信息和第一邻居智能体的状态信息判断智能体是否存在死锁,若是,则采用mapf算法对智能体进行第二局部路径规划,得到第三路径,智能体按照第三路径朝向下一个路径点进行移动,否则重新计算智能体的移动速度,得到第二移动速度,智能体以第二移动速度按照第一路径朝向下一个路径点进行移动;
6、重复上一步骤,直至智能体到达终点。
7、作为优选,获取轨道交通网络,对轨道交通网络进行地图建模,得到无向图,无向图包括节点和边,基于无向图将轨道交通网络中的列车建模成智能体,具体包括:
8、获取轨道交通网络,将轨道交通网络的关键位置抽象为无向图的节点,关键位置包括道岔口和站点,两个节点之间的连接为无向图的边;
9、基于无向图将轨道交通网络中的列车建模成智能体,列车在轨道交通网络中的位置对应智能体在无向图上的位置,采用三元组(tr,v,t)和坐标(x,y)表示智能体在无向图上的位置,其中,tr表示智能体,v表示无向图上的节点,t表示时间步,x、y分别表示智能体在无向图上的横坐标和纵坐标。
10、作为优选,采用orca算法根据智能体的状态信息和第一邻居智能体的状态信息判断智能体和第一邻居智能体是否会发生碰撞,若是,则对智能体进行第一局部路径规划,得到第一移动速度和第二路径,智能体以第一移动速度按照第二路径朝向下一个路径点进行移动,具体包括:
11、采用orca算法根据智能体的状态信息和第一邻居智能体的状态信息计算智能体的移动速度和移动方向,得到第一移动速度和第一移动方向;根据第一移动方向和第一路径判断第一移动方向是否偏离第一路径,若是,则获取智能体的当前位置,并采用搜索算法对智能体进行第一局部路径规划,得到第二路径,智能体以第一移动速度按照第二路径朝向下一个路径点进行移动,否则智能体以当前移动速度按照第一路径朝向下一个路径点进行移动。
12、作为优选,采用mapf算法对智能体进行第二局部路径规划,得到第三路径,智能体按照第三路径朝向下一个路径点进行移动,具体包括:
13、获取智能体的当前位置、第一邻居智能体的当前位置和位于第一邻居智能体的通信范围内的第二邻居智能体的当前位置;
14、根据智能体的当前位置、第一邻居智能体的当前位置和第二邻居智能体的当前位置,确定最小的x坐标、最大的x坐标、最小的y坐标、最大的y坐标,根据经过、、和且与坐标轴垂直的直线确定一个矩形,并将矩形的各边两端分别延长偏移参数d的距离,得到智能体的第二局部路径规划的范围,第二局部路径规划的范围的尺寸为;
15、在第二局部路径规划的范围内,分别获取与智能体的下一个路径点具有最近欧氏距离的位置、与第一邻居智能体的下一个路径点具有最近欧氏距离的位置、与第二邻居智能体的下一个路径点具有最近欧氏距离的位置,分别得到智能体的局部路径规划终点、第一邻居智能体的局部路径规划终点和第二邻居智能体的局部路径规划终点;
16、根据第二局部路径规划的范围以及位于第二局部路径规划的范围内的所有智能体、第一邻居智能体、第二邻居智能体的当前位置和局部路径规划终点,对智能体采用mapf算法进行第二局部路径规划,得到第三路径,智能体按照第三路径朝向下一个路径点进行移动。
17、作为优选,状态信息包括移动速度和移动方向。
18、作为优选,采用搜索算法根据无向图和列车的行驶任务对每个智能体进行单列车路径规划,得到第一路径,搜索算法具体包括:
19、初始化开放列表、关闭列表和无向图的每个节点,将无向图的每个节点的g值设为无穷大,g值表示为从起点到节点的移动成本,h值表示为从节点到终点的估计移动成本,f值表示为g值和h值的和;
20、将列车的行驶任务的起点放入开放列表中,将起点的g值设为0;
21、响应于确定开放列表不为空,则从开放列表选择f值最小的节点作为当前节点,将当前节点从开放列表移出,并加入关闭列表,响应于确定当前节点不为终点,则对当前节点的相邻节点进行遍历,响应于确定相邻节点不是障碍物、不在关闭列表中,且相邻节点不在开放列表中,则将相邻节点加入开放列表,并计算从起点经过当前节点到相邻节点的实际移动成本,得到实际g值;
22、响应于确定相邻节点不是障碍物、不在关闭列表中,且相邻节点在开放列表中,则计算从起点经过当前节点到相邻节点的实际移动成本,得到实际g值,将实际g值与相邻节点当前的g值进行比较,响应于确定实际g值小于相邻节点当前的g值,则更新移动成本,将实际g值替换相邻节点当前的g值;
23、响应于确定相邻节点是障碍物或在关闭列表中,则忽略相邻节点;
24、响应于确定当前节点为终点,则结束搜索,返回第一路径;
25、响应于确定开放列表为空,则结束搜索,返回第一路径。
26、第二方面,本发明提供了一种基于orca的轨道交通路径规划装置,包括:
27、建模模块,被配置为获取轨道交通网络,对轨道交通网络进行地图建模,得到无向图,无向图包括节点和边,基于无向图将轨道交通网络中的列车建模成智能体;
28、单列车路径规划模块,被配置为获取列车的行驶任务,根据无向图和列车的行驶任务对每个智能体进行单列车路径规划,得到第一路径,第一路径包括若干路径点,在每个时间步,智能体从起点出发按照其对应的第一路径朝向下一个路径点进行移动;
29、局部路径规划模块,被配置为根据列车的行驶任务和所有智能体的第一路径,获取智能体的状态信息和位于智能体的通信范围内的第一邻居智能体的状态信息,采用orca算法根据智能体的状态信息和第一邻居智能体的状态信息判断智能体和第一邻居智能体是否会发生碰撞,若是,则对智能体进行第一局部路径规划,得到第一移动速度和第二路径,智能体以第一移动速度按照第二路径朝向下一个路径点进行移动,否则根据智能体的状态信息和第一邻居智能体的状态信息判断智能体是否存在死锁,若是,则采用mapf算法对智能体进行第二局部路径规划,得到第三路径,智能体按照第三路径朝向下一个路径点进行移动,否则重新计算智能体的移动速度,得到第二移动速度,智能体以第二移动速度按照第一路径朝向下一个路径点进行移动;
30、重复模块,被配置为重复上一步骤,直至智能体到达终点。
31、第三方面,本发明提供了一种电子设备,包括一个或多个处理器;存储装置,用于存储一个或多个程序,当一个或多个程序被一个或多个处理器执行,使得一个或多个处理器实现如第一方面中任一实现方式描述的方法。
32、第四方面,本发明提供了一种计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如第一方面中任一实现方式描述的方法。
33、第五方面,本发明提供了一种计算机程序产品,包括计算机程序,计算机程序被处理器执行时实现如第一方面中任一实现方式描述的方法。
34、相比于现有技术,本发明具有以下有益效果:
35、(1)本发明提出的基于orca的轨道交通路径规划方法结合搜索算法、orca算法和mapf算法进行轨道交通路径规划,克服了单独采用集中式方法或分散式方法的局限性,充分发挥了集中式方法和分散式方法的优势,高效解决了轨道交通系统中列车运行冲突和阻塞的问题,实现全局优化和避免碰撞,降低了单点故障的风险,并且能够适应不同区域和交通密度的需求,从而使得路径规划更为高效和优化。
36、(2)本发明提出的基于orca的轨道交通路径规划方法采用orca算法实现多智能体的碰撞避免,并在局部避障逻辑的辅助下对智能体进行第一局部路径规划,确保智能体在面对动态障碍物的情况下,也能找到一条有效的路径到达下一个路径点,具有较高的独立性、灵活性以及更精细的路径规划,并且需要的通信和数据传输较少,具有更高的路径规划效率。
37、(3)本发明提出的基于orca的轨道交通路径规划方法采用mapf算法实现潜在死锁的局部限制的多智能体路径规划,在第二局部路径规划的范围内解决死锁,结合了集中式方法和分散式方法的优点,需要的通信和数据传输较少,对通信网络和基础设施的要求较低,适用于各种网络规模和环境,特别是在边缘地区或资源有限的情况下更为适用,具有更高的路径规划效率。
38、(4)本发明提出的基于orca的轨道交通路径规划方法在第一局部路径规划阶段和第二局部路径规划阶段,通过相邻列车信息交换,考虑了动态环境变化对智能体路径规划带来的影响,具有更精细的路径规划。
39、(5)本发明提出的基于orca的轨道交通路径规划方法在集中式情况下,可以对所有列车的行驶路径进行协调,避免冲突和拥堵,确保列车之间的安全距离和流畅的运行,在分散式情况下,每辆列车独立地规划路径,不需要中央控制器的干预,具有较高的独立性和灵活性,具有更灵活的冲突处理能力。
本文地址:https://www.jishuxx.com/zhuanli/20240808/272151.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表