一种煤矿井下无人液压履带车控制方法
- 国知局
- 2024-08-22 14:48:29
本发明涉及液压履带车,具体涉及一种煤矿井下无人液压履带车控制方法。
背景技术:
1、液压履带车作为巷道中的行走设备,在煤矿采掘探测中经常被用到,以执行搬运及探测任务。由于井下环境恶劣,如巷道塌陷、瓦斯泄露、高粉尘等,因此,研究无人控制行走的液压履带车具有重要应用价值。目前在井下存在通过遥控进行作业的无人液压履带车,但由于井下地形复杂、通道狭窄等因素,无线通讯较为困难并有较高的延时性,操作员可能无法实时监控车辆的每一个动作,导致车辆无法做出及时反应,适应性较差。
技术实现思路
1、为了克服现有技术中的缺陷,本发明提供一种煤矿井下无人液压履带车控制方法,可实现液压履带车自主在井下复杂环境下行走,提高工作安全性及工作效率。
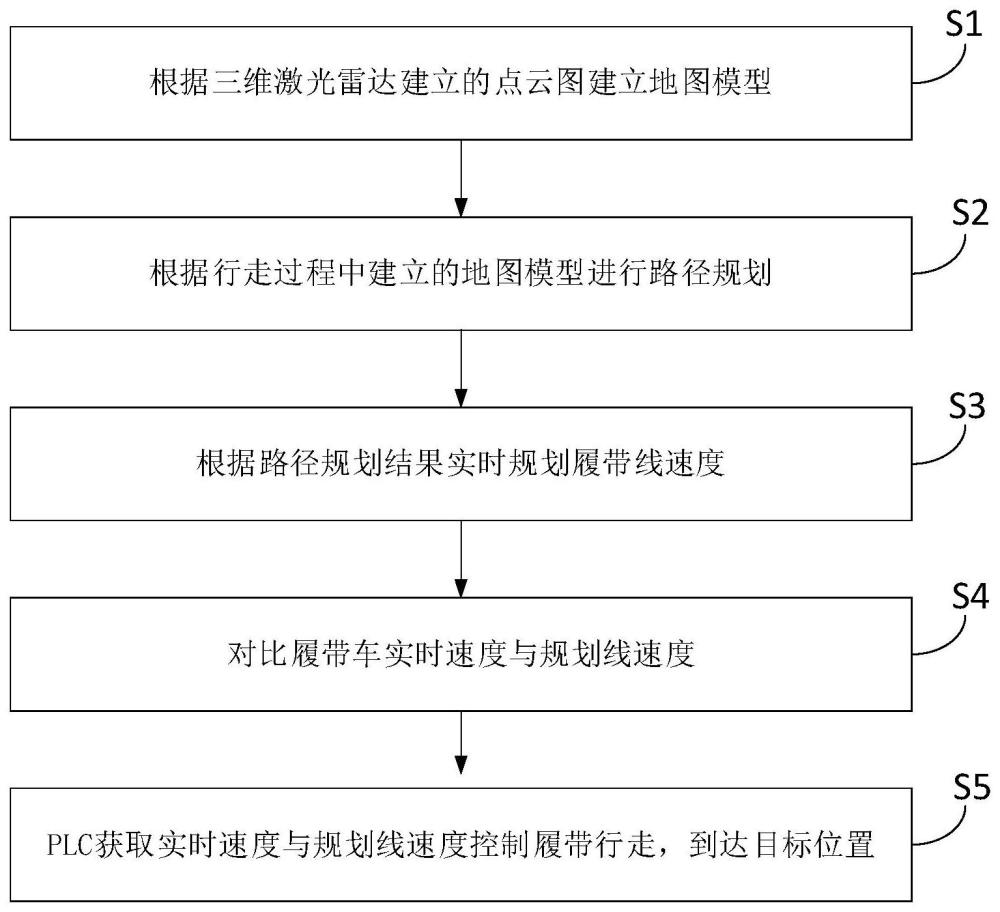
2、本发明的技术方案:一种煤矿井下无人液压履带车控制方法,包括以下步骤:步骤s1、利用履带车车载激光雷达建立点云图,根据点云图建立三维地图模型;步骤s2、对三维地图模型标定,然后对测得的数据进行处理,规划最佳路径;步骤s3、根据路径规划结果实时解算目标线速度;
3、步骤s4、将获取的实时速度数据与目标线速度对比,并将速度数据传输到plc中;
4、步骤s5、plc根据获得的速度数据控制履带车的行走速度,到达目标位置。
5、作为本发明的进一步改进,在步骤s1中,建立三维地图模型的方法具体为:s11、对激光雷达获取的原始点云数据进行预处理,包括去除地面点、聚类处理等,以减少地图建设过程中的噪音和冗余信息;
6、s12、从预处理后的点云数据中提取特征点,用于后续的匹配和建图;
7、s13、根据提取的特征点,构建局部地图,并利用局部地图进行环境的建模和定位;
8、s14、将多个局部地图进行融合,得到整体的环境地图,并更新车辆在地图中的位置。
9、作为本发明的进一步改进,在步骤s2中,路径规划的方法具体为:
10、s21、通过地势分析中点云的强度值,判断高度是否大于阈值来判断该点云是否为障碍物,根据点云和体素网格间的序号对应关系,将该网格视为障碍物网格;s22、通过与路径对应关系,将通过该路径的障碍物标记+1;
11、s23、如果点云高度小于阈值,则将路径的惩罚值作为计算目标函数的依据。
12、作为本发明的进一步改进,在步骤s3中,所述实时解算目标线速度的方法具体为:通过local_planner解算出的最优液压油流量与时间的关系,采用公式v1=2πrηq/v,获取不同时刻的目标速度v1,其中r为主动轮半径,η为容积效率,q流量,v为排量。
13、作为本发明的进一步改进,在步骤s3中,通过路径规划算法local_planner解算出行走距离随时间的变化量,距离对时间求导得出不同时刻的参考速度v2,然后将目标速度v1与参考速度v2比较,当两次解算出的速度值误差在5%之内,记为目标速度有效值,然后发送给plc。
14、与现有技术相比,本发明具有以下优势:
15、(1)履带车在行走过程中进行数据采集和地图建立,实时规划最佳路径,具有良好的应对复杂环境及危险情况的能力;
16、(2)通过上位机的控制模块接收速度传感器传输的实时数据,并对比目标速度,将速度数据传输到plc中,提高了速度控制精度;
17、(3)可以使履带车在无人情况下在巷道中自主行走,提高了井下作业的安全性;(4)摆脱了遥控的控制思路,使提高履带车探测范围,提升了工作效率与经济效益。
技术特征:1.一种煤矿井下无人液压履带车控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的煤矿井下无人液压履带车控制方法,其特征在于,在步骤s1中,所述建立三维地图模型的方法具体为:
3.根据权利要求1所述的煤矿井下无人液压履带车控制方法,其特征在于,在步骤s2中,所述路径规划的方法具体为:
4.根据权利要求1所述的煤矿井下无人液压履带车控制方法,其特征在于,在步骤s3中,所述实时解算目标线速度的方法具体为:通过local_planner解算出的最优液压油流量与时间的关系,采用公式v1=2πrηq/v,获取不同时刻的目标速度v1,其中r为主动轮半径,η为容积效率,q流量,v为排量。
5.根据权利要求4所述的煤矿井下无人液压履带车控制方法,其特征在于,在步骤s3中,通过路径规划算法local_planner解算出行走距离随时间的变化量,距离对时间求导得出不同时刻的参考速度v2,然后将目标速度v1与参考速度v2比较,当两次解算出的速度值误差在5%之内,记为目标速度有效值,然后发送给plc。
技术总结本发明公开了一种煤矿井下无人液压履带车控制方法,包括:利用履带车车载激光雷达建立点云图,根据A‑Loam建图算法,在履带车行走过程中建立地图模型。对三维地图模型标定,然后对测得的数据进行处理,规划最佳路径。结合Local_planner路径规划算法,根据路径规划结果实时解算目标线速度。将获取的实时速度数据与目标线速度对比,并将速度数据传输到PLC中。PLC根据获得的速度数据控制履带车的行走速度,到达目标位置。本发明可实现液压履带车在井下无人自主行走,提高井下环境适应性及工作安全性。技术研发人员:沈睿莹,闫海峰受保护的技术使用者:中国矿业大学技术研发日:技术公布日:2024/8/20本文地址:https://www.jishuxx.com/zhuanli/20240822/279959.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。