一种地下暗井探测方法
- 国知局
- 2024-08-22 14:59:24
本发明涉及管道排水,具体涉及一种地下暗井探测方法。
背景技术:
1、在市政工程建设中,为了重新设计和规划雨污水的排水系统,需要了解地下暗井的分布、深度和结构等信息,这对于城市基础设施建设显得尤为重要。
2、传统的暗井探测方法主要依靠施工图纸,借助地图和地理位置信息从而查找出明井,并推测其上下游可能存在的暗井位置。暗井探测的具体过程如下:首先,现场工人使用管道潜望镜探入井室,进而确定管道走向,然后结合施工图纸记录的距离数据计算出暗井可能位置,最后对路面进行开挖验证。
3、然而,在实际情况中,这种传统暗井方法探测效率较低,存在着图纸的不准确性,以及非常依赖于现场人员的操作技术和主观判断,导致检测误差较大,难以实现准确快速确定暗井位置。
技术实现思路
1、本发明的主要目的是提出一种能够准确快速确定地下暗井位置的地下暗井探测方法。
2、为实现上述目的,本发明提出的一种地下暗井探测方法,所述地下暗井探测方法包括:
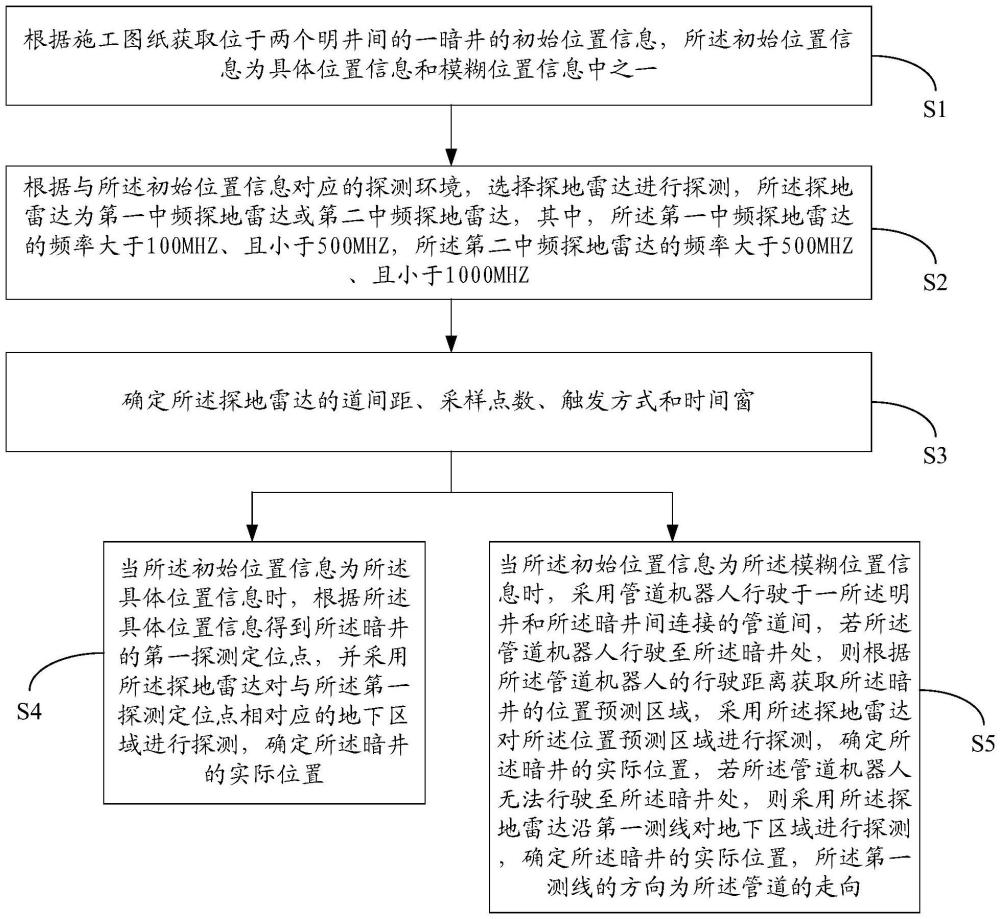
3、步骤s1、根据施工图纸获取位于两个明井间的一暗井的初始位置信息,所述初始位置信息为具体位置信息和模糊位置信息中之一;
4、步骤s2、根据与所述初始位置信息对应的探测环境,选择探地雷达进行探测,所述探地雷达为第一中频探地雷达或第二中频探地雷达,其中,所述第一中频探地雷达的频率大于100mhz、且小于500mhz,所述第二中频探地雷达的频率大于500mhz、且小于1000mhz;
5、步骤s4、当所述初始位置信息为所述具体位置信息时,根据所述具体位置信息得到所述暗井的第一探测定位点,并采用所述探地雷达对与所述第一探测定位点相对应的地下区域进行探测,确定所述暗井的实际位置;
6、步骤s5、当所述初始位置信息为所述模糊位置信息时,驱动管道机器人行驶于一所述明井和所述暗井间连接的管道间,若所述管道机器人行驶至所述暗井处,则根据所述管道机器人的行驶距离获取所述暗井的位置预测区域,采用所述探地雷达对所述位置预测区域进行探测,确定所述暗井的实际位置,若所述管道机器人无法行驶至所述暗井处,则采用所述探地雷达沿第一测线对地下区域进行探测,确定所述暗井的实际位置,所述第一测线的方向为所述管道的走向。
7、进一步地,当所述探测环境为行车道路时,选择第二中频探地雷达作为所述探地雷达进行探测;
8、当所述探测环境为山坡时,选择第一中频探地雷达作为所述探地雷达进行探测。
9、进一步地,所述步骤s5包括:
10、步骤s51、当所述初始位置信息为所述模糊位置信息时,驱动管道机器人行驶于一所述明井和所述暗井间连接的管道间;
11、步骤s52、在所述管道机器人的行驶过程中,通过设于所述管道机器人上的摄像头观察是否行驶至所述暗井处;
12、步骤s53、若所述管道机器人行驶至所述暗井处,则根据所述管道机器人的行驶距离获取所述暗井的位置预测区域,采用所述探地雷达对所述位置预测区域进行探测,确定所述暗井的实际位置;
13、步骤s54、若所述管道机器人无法行驶至所述暗井处,则采用所述探地雷达沿第一测线对地下区域进行探测,确定所述暗井的实际位置,所述第一测线的方向为所述管道的走向。
14、进一步地,所述步骤s53包括:
15、步骤s531、若所述管道机器人行驶至所述暗井处,则根据所述管道机器人的行驶距离获取所述暗井的位置预测区域;
16、步骤s532、采用所述探地雷达对所述位置预测区域进行遍历扫描,直至所述探地雷达接收到异常反射信号,并记录所述探地雷达接收该异常反射信号时所对应的第二探测定位点;
17、步骤s533、采用所述探地雷达对所述第二探测定位点进行复测,确定所述暗井的实际位置。
18、进一步地,所述步骤s533包括:
19、所述步骤s5331、对所述第二探测定位点在其第一方向和第二方向上分别设置第二测线和第三测线,其中,所述第一方向和所述第二方向在地面水平面中相互垂直;
20、所述步骤s5332、采用所述探地雷达沿所述第二测线对地下区域进行探测,并获取所述探地雷达接收反射信号形成的第一暗井特征图像,采用所述探地雷达沿所述第三测线对地下区域进行探测,并获取所述探地雷达接收反射信号形成的第二暗井特征图像;
21、所述步骤s5333、若所述第一暗井特征图像和所述第二暗井特征图像相同,且两个暗井特征图像上表示异常反射信号所对应的地下位置为同一位置,则确定所述第二探测定位点为所述暗井的实际位置。
22、进一步地,所述步骤s54包括:
23、步骤s541、若所述管道机器人无法行驶至所述暗井处,根据所述管道的走向确定所述第一测线;
24、步骤s542、采用所述探地雷达自所述明井处沿所述第一测线对地下区域进行匀速扫描,直至所述探地雷达接收到异常反射信号,并记录所述探地雷达接收该异常反射信号时所对应的第三探测定位点;
25、步骤s543、采用所述探地雷达对所述第三探测定位点进行复测,确定所述暗井的实际位置。
26、进一步地,所述步骤s2之后、以及所述步骤s4之前还包括:
27、步骤s3、确定所述探地雷达的道间距、采样点数、触发方式和时间窗。
28、本发明的技术方案中,通过探地雷达的无损检测特性对地下暗井进行位置确认,如此可避免直接不确定开挖造成的成本损失;同时,本发明针对根据施工图纸获得的有关暗井的初始位置信息的情况提供三种探测方法,不仅对于具体位置信息能够快速准确定位暗井,对于模糊位置信息也能够进行快速准确定位,解决市政工程暗井探测效率低、准确率低的问题,适合大规模城市管网改造更新。
技术特征:1.一种地下暗井探测方法,其特征在于,所述地下暗井探测方法包括以下步骤:
2.如权利要求1所述的地下暗井探测方法,其特征在于,当所述探测环境为行车道路时,选择第二中频探地雷达作为所述探地雷达进行探测;
3.如权利要求1所述的地下暗井探测方法,其特征在于,所述步骤s5包括:
4.如权利要求3所述的地下暗井探测方法,其特征在于,所述步骤s53包括:
5.如权利要求4所述的地下暗井探测方法,其特征在于,所述步骤s533包括:
6.如权利要求3所述的地下暗井探测方法,其特征在于,所述步骤s54包括:
7.如权利要求1所述的地下暗井探测方法,其特征在于,所述步骤s2之后、以及所述步骤s4之前还包括:
技术总结本发明公开一种地下暗井探测方法,涉及管道排水领域,地下暗井探测方法包括:根据施工图纸获取暗井的初始位置信息;根据探测环境选择探地雷达进行探测,探地雷达为第一中频探地雷达或第二中频探地雷达;当初始位置信息为具体位置信息时,得到暗井的第一探测定位点,并对与第一探测定位点对应地下区域进行探测,确定暗井实际位置;当初始位置信息为模糊位置信息时,驱动管道机器人行驶于明井和暗井间连接的管道间,若至暗井处,则根据行驶距离获取暗井的位置预测区域,采用探地雷达探测确定暗井实际位置,若管道机器人无法至暗井处,采用探地雷达沿第一测线对地下区域进行探测,确定暗井实际位置;如此,实现暗井快速准确定位。技术研发人员:周峰,张路,王贤齐,文国军受保护的技术使用者:中国地质大学(武汉)技术研发日:技术公布日:2024/8/20本文地址:https://www.jishuxx.com/zhuanli/20240822/280685.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表