基于散斑投射的六轴机器人定位误差经济型检测方法
- 国知局
- 2024-08-22 15:00:55
本发明属于六轴机器人定位,具体涉及基于散斑投射的六轴机器人定位误差经济型检测方法。
背景技术:
1、工业机器人,指面向工业领域的多关节机械臂或多自由度的机器人。对工业机器人性能指标的测试,是评估工业机器人工作效率、精确度、安全性及环境适应性的主要途径,可以指导工业机器人的设计、制造、使用和测试等工作,对工业机器人的性能评估以及故障诊断具有重要作用。
2、《gbt 12642-2013工业机器人性能规范及其试验方法》中规定了位姿准确度和位姿重复性、多方向位姿准确度变动、距离准确度和距离重复性、位置稳定时间、位置超调量、位姿准确度漂移、位姿重复性漂移、互换性等10余项通用性能指标。该文件还提到共有八种类别的方法被用于测试这些性能指标,分别为试验探头法、轨迹测试法、三边测量法、极坐标测量法、三角测量法、惯性测试法、坐标测量法、轨迹描绘法。
3、目前工业机器人的性能测试大多采用激光跟踪干涉仪法,这是极坐标测量法的一种。该方法有着测量范围大、精度高、可重复性好等优势,但激光跟踪仪造价昂贵、需要定期维护且维护成本较高。
4、常用的工业机器人性能测试仪器还有三坐标测量仪、球杆仪、经纬仪等。与激光跟踪仪相比,三坐标测量仪测量精度高,但测量范围小;球杆仪便携性好,测量灵活,但测量范围有限;经纬仪系统复杂,测量结果与观测水平相关,自动化程度低。
5、近年来,基于随机分布的散斑数字图像相关法(dic)日益兴起并常常被用于全场位移、应变和加速度的测量。散斑数字图像相关法是一种非接触式光学测量技术,通过比较测试对象表面的数字图像来计算每个图像点的运动。数字图像相关法通常包括以下步骤:
6、(1)、图像获取:使用图像采集设备获取目标物体在不同状态下的散斑数字图像。
7、(2)、相似匹配:通过比较两幅散斑图像中的特征,得到每个点在两个状态下的相对位置。这通常通过计算图像区域之间的相似度来完成。
8、(3)、数值计算:结合匹配结果与标定所得参数,计算物体表面的位移、形变等信息。
9、散斑数字图像相关法测量精度可达0.01个像素点,与高空间分辨率显微镜相结合可以轻松实现微观和纳米尺度的测量。除高精度外,该方法还具有实验装置简单以及非接触全场测量等优点,已被广泛应用于材料力学、生物力学及建筑材料力学等方面的测量。
技术实现思路
1、本发明的目的是解决上述问题,提供一种经济性,精度较高的基于散斑投射的六轴机器人定位误差经济型检测方法。
2、为解决上述技术问题,本发明的技术方案是:基于散斑投射的六轴机器人定位误差经济型检测方法,包括以下步骤:
3、s1、系统标定:包括像素坐标系和世界坐标系、像素坐标系和机械臂坐标系的标定;
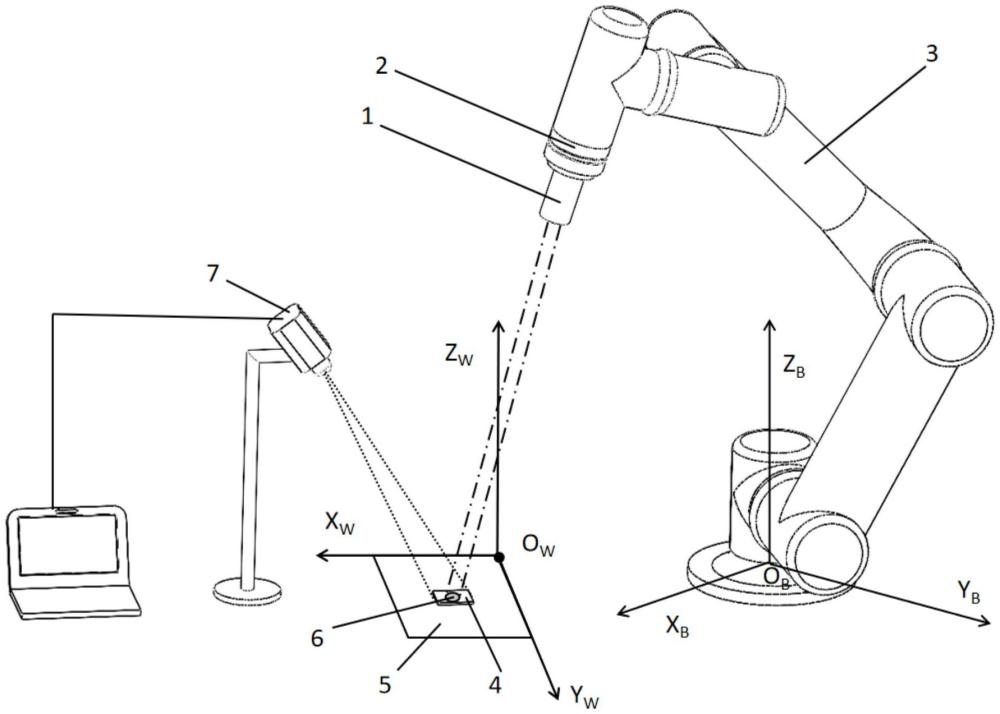
4、s2、定点投射散斑图案与图像采集:包括成像设备,成像设备包括散斑投射器、法兰盘、机械臂、成像板、棋盘标定板、散斑图样和相机,成像板固定安装在机械臂基坐标系下的指定位置,散斑投射器固定安装在机械臂末端上;将制作好的散斑图样投射在成像板上的目标位置,通过计算机编程,机械臂做连续运动或间歇性运动,同时控制机械臂末端始终指向成像板上的目标位置,在机械臂运动过程中,相机进行拍照,得到多组图像;
5、s3、计算误差:利用s1中的标定相机所得畸变参数对图像进行处理,消除图像的径向及切向畸变;在参考图像中选取一个待测点,在变形图像中的对应子区求解相关系数,通过整像素搜索和亚像素搜索,得到变形图像中待测点的对应点,计算待测点的位移;选择不同待测点,取平均位移作为图像的总位移;通过坐标系之间的转换关系,将图像总位移,转换到机械臂基坐标系下,即为机械臂的定位误差。
6、进一步地,所述s2中的散斑投射器,其内部由准直激光器以及散斑图案组成,散斑投射器被固定安装在机械臂末端的法兰盘上,随着机械臂的移动、转动而运动,用于将制作好的散斑图样投射在固定的成像板上;相机固定安装,对准成像板,成像板表面为较为平整的亚光面,被固定安装在棋盘标定板的位置,用于接收散斑投射器所投射出的散斑图样。
7、进一步地,所述s1中像素坐标系和世界坐标系的标定包括以下步骤:
8、s11、标定像素坐标系和世界坐标系;
9、其中s11的具体步骤如下:
10、s111、将相机固定在相机支架上,成像板固定在棋盘标定板上,相机进行拍照得到第一张标定图像;
11、s112、不断改变棋盘标定板相对于相机的位姿,进行拍照;通过张正友标定法的相关算法计算出相机的内参矩阵、多个外参矩阵以及畸变参数;
12、s113、通过第一张标定图像的内外参矩阵,计算可得像素坐标系和世界坐标系的转换关系;由此可以消除图像的切向畸变,为后面使用散斑图案进行位移求解做准备。
13、进一步地,所述s1中像素坐标系和机械臂坐标系的标定包括以下步骤:
14、s12、标定像素坐标系和机械臂基坐标系;
15、其中s12的具体步骤如下:
16、s121、标定像素坐标系op-uv和机械臂基坐标系ob-xbybzb的坐标轴方向;
17、控制机械臂将散斑图案投射到成像板上的指定位置,机械臂稳定后,相机进行图像采集;消除图像的径向和切向畸变后,使用散斑图案进行位移求解的具体方法选取待测点,计算得到起点a的坐标(u1,v1);
18、s122、控制机械臂,沿机械臂坐标系的xb轴运动一段距离,到达终点b(u′1,v′1);
19、机械臂运动时,其投射的散斑在世界坐标系中的成像板上相应地移动了一段距离,根据s11中世界坐标系与像素坐标系的标定,可以得出在像素坐标系下,的方向与机械臂基坐标系的xb轴相对应,与u轴的夹角为有:
20、
21、建立新的像素坐标系op-u′v′,其坐标原点与op重合,u′轴方向和方向平行,v′轴与u′垂直;像素坐标系op-uv下的像素点(u0,v0),在像素坐标系op-u′v′下的对应点为(u0′,v0′),它们之间的对应关系为:
22、
23、通过(2)式,将像素坐标系op-uv下的图像信息转换到新的像素坐标系op-u′v′下,得到新图像;
24、在新图像中,u′轴方向上的误差对应着机械臂基坐标系的xb轴方向上的误差;v′轴方向上的误差对应着机械臂基坐标系的yb轴方向上的误差;
25、s123、标定像素坐标系op-u′v′和机械臂坐标系轴向的长度对应关系;
26、控制机械臂将散斑图案投射到成像板上的指定位置,机械臂稳定后,相机进行图像采集;消除图像的径向和切向畸变后,使用s121中散斑图案进行位移求解的具体方法,选取待测点,计算得到起点c的坐标(u2,v2);控制机械臂,沿世界坐标系的x轴运动距离s0,到达终点d(u′2,v2′);根据机械臂基坐标系、世界坐标系与像素坐标系之间的对应关系,可以得到机械臂基坐标系x方向与像素坐标系u′方向距离关系的表达式:
27、
28、故在像素坐标系op-u′v′下u′轴方向上的误差δu,和机械臂基坐标系xw轴方向上的误差δx之间有着这样的关系:
29、δx=fuxδu (4)
30、同理可以完成对像素坐标系op-u′v′下v′轴方向上的误差δv,和机械臂基坐标系yw轴方向上的误差δy之间的标定:
31、δy=fvyδv (5)。
32、进一步地,所述s121中使用散斑图案进行位移求解的具体方法包括以下步骤:
33、s131、选取待测点p(x,y),对目标子区进行相关系数求解;
34、s132、进行整像素搜索,求出整像素坐标h(x,y);
35、s133、进行亚像素搜索,先用灰度插值法对h(x,y)相邻区域插值,再进行整像素搜索,得到位移子区中的对应点p′(x′,y′),继而得到待测点的偏移量。
36、进一步地,所述s131的具体步骤如下:
37、s1311、在参考图像中的像素坐标系上选择一个待测点p1(x,y),并以点p1(x,y)为中心划分一个大小为(2n+1)*(2n+1)的区域作为参考子区,在变形图像中与p1点对应的位置划分一个大小为(2m+1)*(2m+1)的搜索区域(m>n),并在搜索区域中划分若干与参考子区大小相同的变形子区;
38、s1312、用f(x,y)与g(x,y)分别表示参考图像和变形图像的灰度值。两张图像中散斑图案整体的移动可以近似看作刚体位移。假设图案的位移为(δu,δv),参考图像中待测点为p1(x,y),变形图像的对应点为p1′(x′,y′),则f(x,y)=g(x+δu,y+δv),δu=x’-x,δv=y’-y;
39、s1313、使用零均值归一化互相关函数对变形子区进行相关运算,计算出相关系数c,其在某一像素点处取得最大值;该公式中,f(xi,yi)表示参考子区中像素点的灰度值,g(xi′,yi′)表示变形子区中像素点的灰度值;fm为参考子区中所有像素点的平均灰度值,gm为变形子区中所有像素点的平均灰度值。
40、进一步地,所述s132具体步骤如下:根据上述公式计算相关系数c,运用粒子群算法迭代运算,得到与待测点相关性最大的整像素点坐标h(x,y);该过程中使用相关函数求解时,相关系数c在某一像素点处取得最大值,故虽然图案在投射过程中由于角度变化发生畸变,通过相关函数的计算仍然可以得到变形子区中与参考子区中待测点相似度最高的像素点,完成整像素搜索。
41、进一步地,所述s133具体步骤如下:
42、s1331、以h(x,y)为中心,在变形图像中选取一个待插值区域,并在原图中以待测点为中心选取同样大小的待插值区域,使用双三次插值算法对待插值区域进行插值,得到插值后的灰度值f(x0,y0);
43、s1332、将插值后的图像再次用粒子群算法进行整像素搜索,找到新的整像素坐标,该坐标即为位移后的对应点p1′(x′,y′),可以得到位移量(δu,δv);
44、s1333、选取多个不同的待测点p1、p2、p3等,重复上述过程,得到多个位移量(δui,δvi),对位移量取平均值,可以得到散斑图案的精度较高的整体位移量。
45、进一步地,所述s2中定点投射散斑图案与图像采集包括以下步骤:
46、s21、将成像板固定安装在机械臂基坐标系xbobyb平面下的指定位置,散斑投射器固定安装在机械臂末端。将制作好的散斑图样投射在成像板上的目标位置;
47、s22、改变机械臂的位姿与多次图像采集。通过计算机编程操控机械臂,使其按照设定好的某一路径,进行连续运动,在机械臂进行运动过程中,机械臂末端的激光准直器始终指向目标位置,相机不断地进行拍照,从而得到多张图像;
48、s23、另外,还可以通过计算机编程操控机械臂,使其按照设定好的某一路径,进行间歇运动,机械臂末端的激光准直器始终指向目标点,在机械臂停止运动时,相机进行拍照;
49、通过这两种方法可以完成连续或间歇两种运动方式的六轴机器人在xb,yb方向的定位误差检测;
50、s24、类似的,将成像板固定安装在机械臂基坐标系xbobzb平面或者ybobzb平面下的指定位置,即可测得六轴机器人在xb,zb方向或者yb,zb方向的定位误差检测。从而可以对六轴机器人在三维空间内的定位误差进行检测评估。
51、进一步地,所述s3中计算误差包括以下步骤:
52、s31、利用s1中标定所得的参数对图像进行处理,消除图像的径向及切向畸变,完成像素坐标系和机械臂基坐标系的对应;
53、s32、结合使用散斑图案进行位移求解的具体方法,在参考图像中选取一个待测点,在变形图像中的对应子区求解相关系数,通过整像素搜索和亚像素搜索,得到变形图像中待测点的对应点,计算待测点的位移。选择不同待测点,取平均位移作为图像的总位移;
54、″″
55、s33、通过公式(3)、(4)、(5),将像素坐标系op-uv下u轴和v轴上的误差分别转换到机械臂基坐标系xb,yb方向上的误差。
56、本发明的有益效果是:
57、1、本发明所提供的基于散斑投射的六轴机器人定位误差经济型检测方法,使用低成本摄像机采集图像,通过对散斑图像进行数字处理从而计算出高分辨率的机械臂定位误差。整个装置结构简单,成本较低,易于实现,具有广阔的应用价值。
58、2、本发明使用散斑图案进行位移求解,相较于传统的测量方法,大幅提高了微小误差测量的分辨率。
59、3、本发明成像板的位置可根据实际应用场景进行选取。通过改变机械臂运动的方式和成像板的位置,可以实现三维空间内的定位误差检测,具有较高的实用性。
本文地址:https://www.jishuxx.com/zhuanli/20240822/280790.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。