一种智能液压反击式破碎机的制作方法
- 国知局
- 2024-09-05 14:33:25
本发明涉及物料破碎领域,尤其涉及一种智能液压反击式破碎机。
背景技术:
1、反击式破碎机主要由机体、转子、反击架和反击衬板组成,反击衬板装在反击架上,反击架并非完全固定在机体上,而是通过拉杆和弹簧配合将反击架与机体相连,由转子旋转击打物料,使物料在转子与反击衬板之间产生碰撞进行破碎,通过弹簧弹力的改变,可以控制反击架的反馈力度,以适应不同粒径物料的破碎;
2、例如,授权公告号为cn104028337b的中国专利,公开的一种反击式破碎机,包括机架、转子、第一反击架、第二反击架,其反击衬板安装在第一反击架和第二反击架上,要控制物料破碎粒径及破碎效率,就需要控制反击衬板和转子之间的间距以及第一反击架与第二反击架的反击力度;
3、例如,授权公告号为cn207056683u的中国专利,公开的一种反击式破碎机用的新式液压调整机构,包括调节架,调节架包括支撑架和衬板,衬板上设有杆孔,弹簧拉杆穿过杆孔后套设复位弹簧、弹簧座和锁紧螺母,弹簧拉杆另一端套设有平垫圈和六角螺母;衬板两端设有通槽,衬板上设有铰链座,铰链座上设有调节油缸组件,其通过调节油缸调节调节架实现反击衬板的位置调节;
4、然而其调节方式只能做到被动调节,在破碎物料时,物料从进入机体内到破碎完成,主要经过三个阶段,即物料由整体到初次破碎分裂、初次破碎分裂到再次破碎分裂、再次破碎分裂到破碎完成,由于物料体积的变化,其自身碰撞时的惯性力会产生变化,若用被动调节的调节方式,反击架就无法在不同阶段自动调整到较佳的位置及较佳的反馈力度。
技术实现思路
1、有鉴于此,本发明的目的在于提出一种智能液压反击式破碎机,以实现破碎过程中,对不同破碎阶段,自行调整反击架的位置及反馈力度。
2、为达到上述技术目的,本发明提供了一种智能液压反击式破碎机:
3、其包括:机体,内部转动连接有转子和反击架;缸筒,与机体转动连接,所述缸筒内依次分为第一调压腔、压缩腔和第二调压腔,所述压缩腔内滑动密封连接有牵拉杆和分隔塞,所述牵拉杆与分隔塞之间设有弹簧,所述牵拉杆的端部与反击架铰接;第一采集模块,固定于机体上,用于采集机体的声音频率;第二采集模块,固定于机体上,用于采集机体的振动频率;识别模块,将声音频率和振动频率输入到训练完成的破碎状态识别模型,输出破碎状态;控制模块,基于破碎状态,判断是否生成调整指令;调液机构,固定于机体上,且所述调液机构的输出端分别与第一调压腔和第二调压腔连通,根据调整指令调整第一调压腔和第二调压腔的内部液量。
4、优选地,所述机体包括固定壳和检修壳,所述固定壳两端分别开设有进料口和出料口,所述检修壳与固定壳转动连接,所述检修壳的两侧皆设有检修油缸,所述检修油缸的两端分别与固定壳和检修壳铰接。
5、优选地,所述转子与固定壳转动连接,所述转子外表面均匀固定有板锤;所述反击架与检修壳转动连接,所述反击架的外表面固定有反击衬板。
6、优选地,所述缸筒与检修壳转动连接,所述牵拉杆与检修壳滑动密封连接,所述牵拉杆上套设有分隔环,且所述分隔环与缸筒滑动密封连接。
7、优选地,所述调液机构至少设有两个,两个所述调液机构的输出端皆通过管道分别与第一调压腔和第二调压腔连通。
8、优选地,所述调液机构包括:储液筒,固定在机体上,内部充满液体,并通过管道与第一调压腔或第二调压腔连通;活塞,与储液筒滑动密封连接,用于挤压液体;推拉架,与储液筒滑动密封连接,并与活塞固定连接;步进电机,固定在机体上,所述步进电机输出端固定有丝杆,所述丝杆与推拉架螺纹连接。
9、优选地,所述丝杆的两端皆转动连接有固定座,所述固定座与机体固定连接;所述推拉架端部固定有丝套,且所述丝套与丝杆螺纹连接。
10、优选地,所述破碎状态识别模型训练方法为:在对破碎状态识别模型训练前,收集k组历史特征数据,历史特征数据包括声音频率和振动频率;对k组历史特征数据的破碎状态进行数值标注,破碎状态为一级破碎时,标注为1,破碎状态为二级破碎时,标注为2,破碎状态为三级破碎时,标注为3;将每组历史特征数据作为机器学习模型的输入,所述机器学习模型以对每组历史特征数据的预测标注为输出,以实际标注为预测目标,以最小化所有标注的预测准确度之和作为训练目标;对机器学习模型进行训练,直至预测准确度之和达到稳定时,停止训练并将训练得到的机器学习模型作为破碎状态识别模型,破碎状态识别模型为朴素贝叶斯模型或支持向量机模型的其中一种。
11、优选地,根据调整指令调整第一调压腔和第二调压腔的内部液量的方法包括:所述缸筒上固定有第三采集模块,用于采集第一调压腔和第二调压腔内的实时液位值一和实时液位值二,分别标记为l1和l2,l1和l2皆为大于等于0的数值;预建立调节库,根据破碎状态对应建立目标液位值一和目标液位值二,分别标记为m1和m2,m1和m2皆为大于等于0的数值;若生成调整指令,所述调液机构开始工作,直至l1等于m1以及l2等于m2,所述调液机构停止工作。
12、优选地,基于破碎状态,判断是否生成调整指令的方法包括:获得破碎状态所对应的预测标注,当预测标注等于1时,生成第一调整指令,当预测标注等于2时,生成第二调整指令,当预测标注等于3时,生成第三调整指令。
13、从以上技术方案可以看出,本申请具有以下有益效果:
14、1:通过识别粉碎过程中声音频率与振动频率的变化,输出破碎状态,根据破碎状态改变反击架的位置和反馈力度,提升破碎效率。
15、2:通过在缸筒内开设相互连通的压缩腔、第一调压腔和第二调压腔,通过调整第一调压腔和第二调压腔内液量,即可灵活改变牵拉杆的位置以及弹簧的压缩力度,适应不同物料的破碎需求。
16、附图说明
17、为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
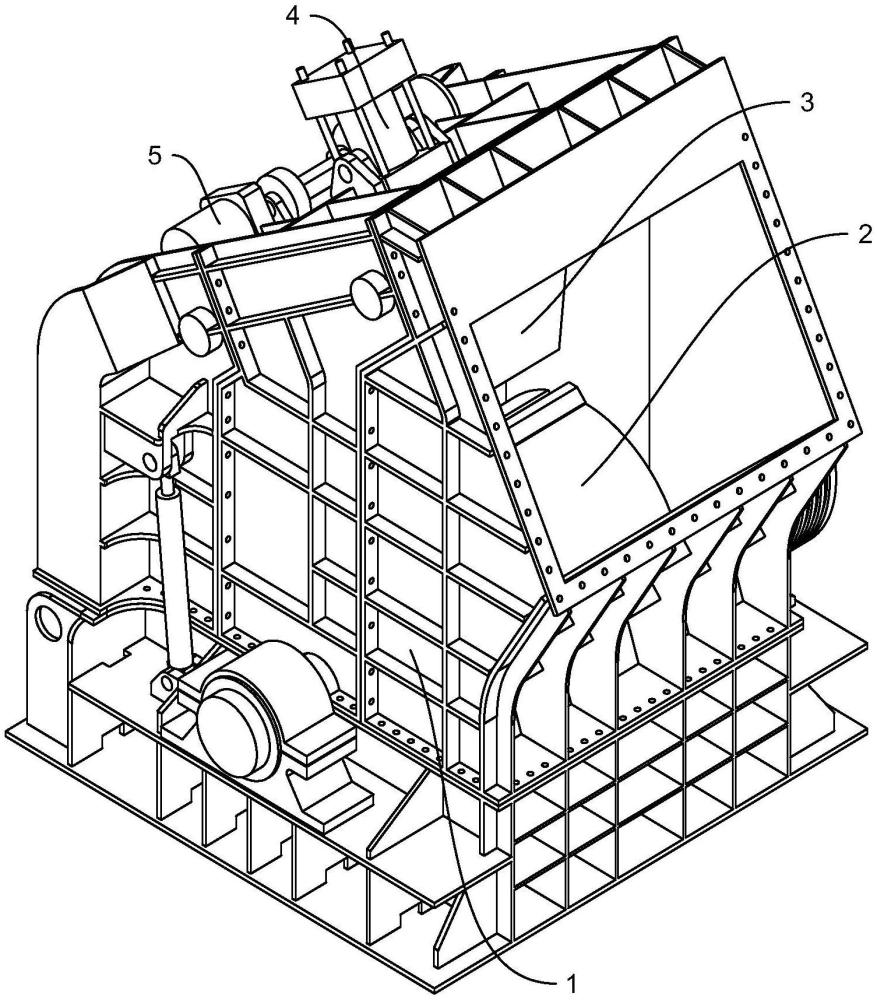
18、图1为本发明提供的一种智能液压反击式破碎机的整体结构示意图;
19、图2为本发明提供的一种智能液压反击式破碎机的剖面结构示意图;
20、图3为本发明提供的一种智能液压反击式破碎机的缸筒剖面结构示意图;
21、图4为本发明提供的一种智能液压反击式破碎机的调液机构整体结构示意图;
22、图5为本发明提供的一种智能液压反击式破碎机的调液机构剖面结构示意图;
23、图6为本发明提供的一种智能液压反击式破碎机的机体整体结构示意图;
24、图7为本发明提供的一种智能液压反击式破碎机的检修壳检修状态示意图;
25、图8为本发明提供的控制模块流程框图。
技术特征:1.一种智能液压反击式破碎机,其特征在于,包括:
2.根据权利要求1所述的一种智能液压反击式破碎机,其特征在于,所述机体(1)包括固定壳(101)和检修壳(102),所述固定壳(101)两端分别开设有进料口(101a)和出料口(101b),所述检修壳(102)与固定壳(101)转动连接,所述检修壳(102)的两侧皆设有检修油缸(102a),所述检修油缸(102a)的两端分别与固定壳(101)和检修壳(102)铰接。
3.根据权利要求2所述的一种智能液压反击式破碎机,其特征在于,所述转子(2)与固定壳(101)转动连接,所述转子(2)外表面均匀固定有板锤(21);
4.根据权利要求2所述的一种智能液压反击式破碎机,其特征在于,所述缸筒(4)与检修壳(102)转动连接,所述牵拉杆(41)与检修壳(102)滑动密封连接,所述牵拉杆(41)上套设有分隔环(44),且所述分隔环(44)与缸筒(4)滑动密封连接。
5.根据权利要求1所述的一种智能液压反击式破碎机,其特征在于,所述调液机构(5)至少设有两个,两个所述调液机构(5)的输出端皆通过管道分别与第一调压腔(4b)和第二调压腔(4c)连通。
6.根据权利要求1所述的一种智能液压反击式破碎机,其特征在于,所述调液机构(5)包括:
7.根据权利要求6所述的一种智能液压反击式破碎机,其特征在于,所述丝杆(541)的两端皆转动连接有固定座(541a),所述固定座(541a)与机体(1)固定连接;所述推拉架(53)端部固定有丝套(531),且所述丝套(531)与丝杆(541)螺纹连接。
8.根据权利要求1所述的一种智能液压反击式破碎机,其特征在于,所述破碎状态识别模型训练方法为:在对破碎状态识别模型训练前,收集k组历史特征数据,历史特征数据包括声音频率和振动频率;对k组历史特征数据的破碎状态进行数值标注,破碎状态为一级破碎时,标注为1,破碎状态为二级破碎时,标注为2,破碎状态为三级破碎时,标注为3;将每组历史特征数据作为机器学习模型的输入,所述机器学习模型以对每组历史特征数据的预测标注为输出,以实际标注为预测目标,以最小化所有标注的预测准确度之和作为训练目标;对机器学习模型进行训练,直至预测准确度之和达到稳定时,停止训练并将训练得到的机器学习模型作为破碎状态识别模型,破碎状态识别模型为朴素贝叶斯模型或支持向量机模型的其中一种。
9.根据权利要求8所述的一种智能液压反击式破碎机,其特征在于,根据调整指令调整第一调压腔(4b)和第二调压腔(4c)的内部液量的方法包括:
10.根据权利要求8所述的一种智能液压反击式破碎机,其特征在于,基于破碎状态,判断是否生成调整指令的方法包括:
技术总结本发明公开了一种智能液压反击式破碎机,涉及物料破碎领域。现提出如下方案,其包括:机体,内部转动连接有转子和反击架;缸筒,与机体转动连接,所述缸筒内依次分为第一调压腔、压缩腔和第二调压腔,所述压缩腔内滑动密封连接有牵拉杆和分隔塞,所述牵拉杆与分隔塞之间设有弹簧,所述牵拉杆的端部与反击架铰接;第一采集模块,固定于机体上,用于采集机体的声音频率;第二采集模块,固定于机体上,用于采集机体的振动频率;识别模块,将声音频率和振动频率输入到训练完成的破碎状态识别模型,输出破碎状态。通过识别粉碎过程中声音频率与振动频率的变化,输出破碎状态,根据破碎状态改变反击架的位置和反馈力度,提升破碎效率。技术研发人员:王文峰受保护的技术使用者:江苏山宝集团有限公司技术研发日:技术公布日:2024/9/2本文地址:https://www.jishuxx.com/zhuanli/20240905/286929.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表