一种面向超声机器人的自适应控制方法及系统
- 国知局
- 2024-09-05 14:47:55
本发明涉及机器人控制领域,尤其涉及一种面向超声机器人的自适应控制方法及系统。
背景技术:
1、超声成像技术作为一种常规的医学成像方法以及成为了医学检测和诊断的常用工具。在一个标准的超声检测中,超声医生需要维持病人与超声探头间的最优接触力,确保声学耦合以获得高质量的超声图像。根据调查表明,大多数医生在高负荷的工作中患有肌肉骨骼方面的职业病,因此超声机器人在该行业具有广阔前景。
2、常规的超声机器人普遍采用恒力控制,对于人体软组织结构的可变性,缺乏泛化能力;对于不同的病人,需要反复测试以寻找合适的接触力。
技术实现思路
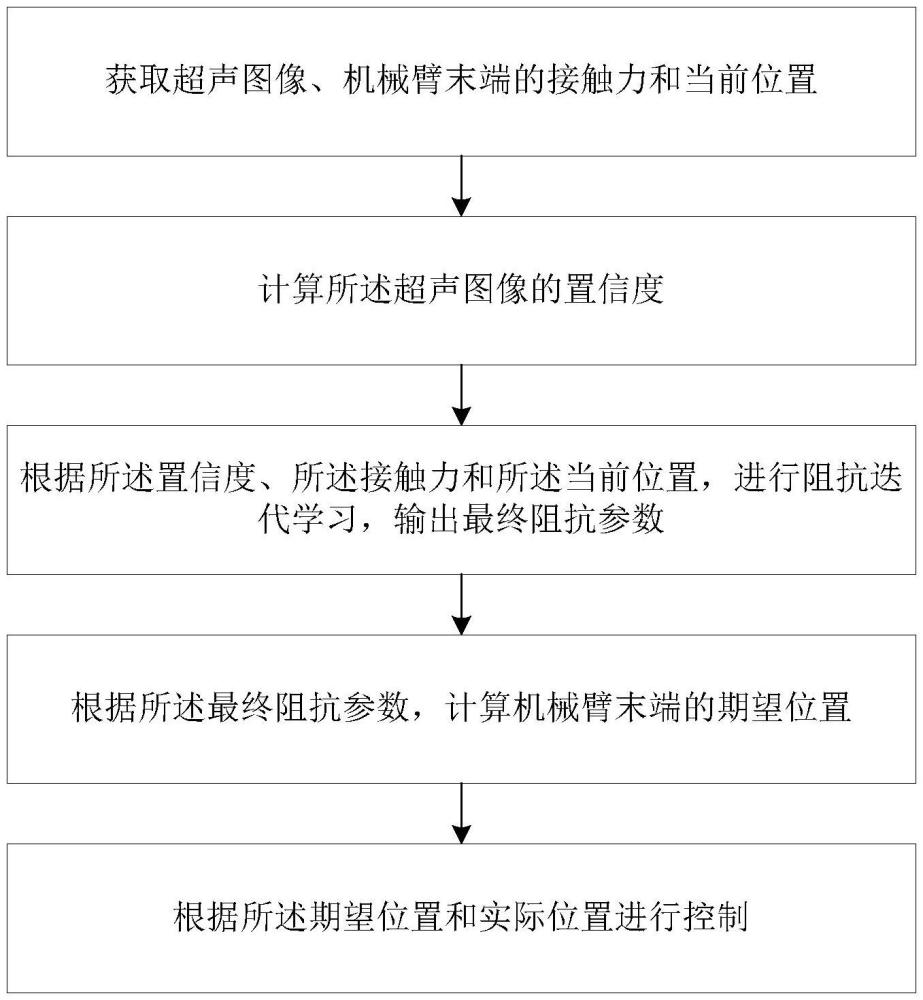
1、有鉴于此,为了解决现有超声机器人中无法自适应控制接触力,进而导致超声成像质量低的技术问题,第一方面,本发明提出一种面向超声机器人的自适应控制方法,所述方法包括以下步骤:
2、获取超声图像、机械臂末端的接触力和当前位置;
3、计算所述超声图像的置信度;
4、根据所述置信度、所述接触力和所述当前位置,进行阻抗迭代学习,输出最终阻抗参数;
5、根据所述最终阻抗参数,计算机械臂末端的期望位置;
6、根据所述期望位置和实际位置进行控制。
7、在一些实施例中,所述计算所述超声图像的置信度这一步骤,其具体包括:
8、对所述超声图像进行像素压缩,得到压缩后的图像;
9、基于所述随机游走算法对所述压缩后的图像进行置信度计算,得到每个像素点的置信度;
10、根据每个像素点的置信度进行平均值计算,得到超声图像的置信度。
11、在一些实施例中,所述根据所述置信度、所述接触力和所述当前位置,进行阻抗迭代学习,输出最终阻抗参数:
12、构建动力学模型并引入关于置信度的虚拟立场,更新得到第一关系式;
13、设定状态方程、约束关系和代价函数;
14、定义系统输入,计算θη,yηη和yηu直至满足预设条件;
15、基于迭代公式重复计算pk和kk+1,得到最终阻抗参数。
16、在一些实施例中,所述第一关系式表示如下:
17、
18、其中,表示置信度,ca表示环境的阻尼系数,ga表示环境的刚度系数,kc为虚拟力τc与置信度之间未知的线性关系系数。
19、在一些实施例中,所述中间参数包括:
20、
21、
22、
23、其中,η表示状态变量,t表示对矩阵进行转置,t表示时间。
24、在一些实施例中,所述预设条件表示如下:
25、
26、其中,p表示表示状态变量的维度,q表示表示输入的维度。
27、在一些实施例中,所述迭代公式表示如下:
28、
29、其中,表示代价函数最小时的辅助常量矩阵,kk+1表示最优的阻抗参数,表示与控制输入性能指标相关的中间变量,表示的转置,ψk表示与跟随性能指标相关的中间变量。
30、在一些实施例中,还包括利用平滑函数对阻抗参数的曲线进行平滑处理,所述平滑函数表示如下:
31、
32、其中,ts为预先设定的时间,为过渡过程的阻抗参数,k0表示初始阻抗参数,kk表示最终迭代完成的最优阻抗参数。
33、本发明还提出了一种面向超声机器人的自适应控制系统,所述系统包括:
34、数据获取模块,用于获取超声图像、机械臂末端的接触力和当前位置;
35、第一计算模块,用于计算所述超声图像的置信度;
36、迭代计算模块,用于根据所述置信度、所述接触力和所述当前位置,进行阻抗迭代学习,输出最终阻抗参数;
37、第二计算模块,用于根据所述最终阻抗参数,计算机械臂末端的期望位置;
38、控制模块,用于根据所述期望位置和实际位置进行控制。
39、本发明还提出了一种面向超声机器人的自适应控制装置,包括:
40、至少一个处理器;
41、至少一个存储器,用于存储至少一个程序;
42、当所述至少一个程序被所述至少一个处理器执行,使得所述至少一个处理器实现如上所述一种面向超声机器人的自适应控制方法。
43、基于上述方案,本发明提供了一种面向超声机器人的自适应控制方法及系统,引入置信度图用于评价超声图像的质量,进一步构建置信度驱使的阻抗最优学习策略,结合接触力的大小进行机械臂末端的控制,实现基于超声置信度的超声机器人系统自适应最优控制策略。
技术特征:1.一种面向超声机器人的自适应控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述一种面向超声机器人的自适应控制方法,其特征在于,所述计算所述超声图像的置信度这一步骤,其具体包括:
3.根据权利要求2所述一种面向超声机器人的自适应控制方法,其特征在于,所述根据所述置信度、所述接触力和所述当前位置,进行阻抗迭代学习,输出最终阻抗参数这一步骤,其具体包括:
4.根据权利要求3所述一种面向超声机器人的自适应控制方法,其特征在于,所述第一关系式表示如下:
5.根据权利要求3所述一种面向超声机器人的自适应控制方法,其特征在于,所述中间参数包括:
6.根据权利要求5所述一种面向超声机器人的自适应控制方法,其特征在于,所述预设条件表示如下:
7.根据权利要求4所述一种面向超声机器人的自适应控制方法,其特征在于,所述迭代公式表示如下:
8.根据权利要求2所述一种面向超声机器人的自适应控制方法,其特征在于,还包括利用平滑函数对阻抗参数的曲线进行平滑处理,所述平滑函数表示如下:
9.一种面向超声机器人的自适应控制系统,其特征在于,包括:
技术总结本发明公开了一种面向超声机器人的自适应控制方法及系统,该方法包括:获取超声图像、机械臂末端的接触力和当前位置;计算所述超声图像的置信度;根据所述置信度、所述接触力和所述当前位置,进行阻抗迭代学习,输出最终阻抗参数;根据所述最终阻抗参数,计算机械臂末端的期望位置;根据所述期望位置和实际位置进行控制。该系统包括:数据获取模块、第一计算模块、迭代计算模块、第二计算模块和控制模块。通过使用本发明,能够实现超声机器人的自适应控制,提高超声成像的质量。本发明可广泛应用于机器人控制领域。技术研发人员:黄浩晖,黎锦坤,郑文旭,郭靖,孟伟,杨辰光受保护的技术使用者:广东工业大学技术研发日:技术公布日:2024/9/2本文地址:https://www.jishuxx.com/zhuanli/20240905/288158.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表