一种停车充电控制参数的自动标定系统、方法及动力汽车与流程
- 国知局
- 2024-09-05 14:50:21
本发明涉及动力汽车控制,尤其涉及一种停车充电控制参数的自动标定系统、方法及动力汽车。
背景技术:
1、随着混合动力汽车技术的不断发展,其经济性和环保性得到了广泛关注。在混合动力汽车的运行过程中,停车充电控制是一个关键环节,它直接影响着车辆的动力系统效率和经济性能。然而,现有的停车充电控制方法大多基于固定的控制参数进行,这些参数的选取往往仅依据部件的测试标定结果,而忽略了车辆在实际运行过程中的复杂性和多变性。
2、具体而言,停车充电控制参数的选取多数取决于发动机万有特性曲线、电池允许充电功率和电池荷电状态(state of charge,soc)等因素。然而,发动机的万有特性并非一成不变,它会受到发动机水温、后处理状态、附件工作状态等多种因素的影响。同时,电池充电效率也会受到电池soc、电池单体温度、电池单体电压等多种因素的影响。因此,仅根据部件的测试标定结果来决定停车充电控制参数,并不能保证充电效率最高,从而影响了整车的经济性能。
3、针对这一问题,近年来已有一些专利提出了一些改进方案。例如,中国专利cn202210453948针对双电机功率分流混动动力系统,通过判断电池soc、主动制动状态、电池允许充电功率等条件,保证了进入停车充电的安全性。然而,该方案并未涉及如何根据当前车辆状态和部件状态自动标定充电控制参数,以提高充电效率。
4、中国专利cn202311722103提出了一种基于发动机万有特性和充电时间选择候选功率点,并根据预期充电时间和发动机转速差确定最终的充电功率的方法。虽然该方案考虑了发动机万有特性的影响,但其充电功率的确定仍依赖于发动机、电机、电池等部件预设的标定数据,缺乏根据当前车辆状态进行实时调整的能力。
5、中国专利cn202310132339提出了一种汽车停车充电控制方法,该方法包括离合器接合、发动机启动、发动机调速、电机调扭和正常发电等阶段。然而,该方法在正常发电阶段的目标转速和目标扭矩均为设定的固定值或固定范围,没有考虑到车辆状态和部件状态的变化对充电效率的影响。
技术实现思路
1、为此,本发明实施例提供了一种停车充电控制参数的自动标定系统、方法及动力汽车,用于解决现有技术中多依赖于预设标定数据,缺乏实时根据车辆和部件状态自动调整充电参数的能力,导致充电效率不高,影响整车经济性能的问题。
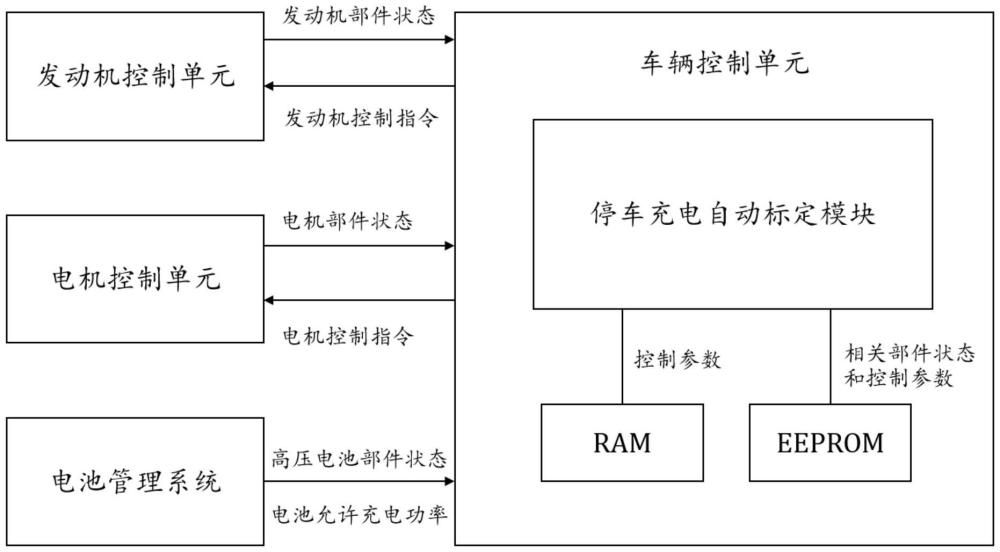
2、为了解决上述问题,本发明实施例提供一种停车充电控制参数的自动标定系统,该系统包括发动机控制单元、电机控制单元、电池管理系统、车辆控制单元;
3、所述发动机控制单元、车辆控制单元、电池管理系统、电机控制单元均与can总线连接;
4、所述发动机控制单元与发动机连接,用于向所述车辆控制单元发送发动机部件状态,并接收所述车辆控制单元发送的发动机控制指令;
5、所述电机控制单元与电机连接,用于向所述车辆控制单元发送电机部件状态,并接收所述车辆控制单元发送的电机控制指令;
6、所述电池管理系统与高压电池连接,用于向所述车辆控制单元发送高压电池部件状态;
7、所述电池管理系统与高压电池连接,用于向所述车辆控制单元发送高压电池部件状态;
8、所述车辆控制单元,包括停车充电自动标定模块、ram和eeprom,所述车辆控制单元用于接收所述发动机控制单元发送的发动机部件状态、所述电机控制单元发送的电机部件状态、所述电池管理系统发送的高压电池部件状态,并向所述发动机控制单元发送发动机控制指令,向所述电机控制单元发送电机控制指令;
9、其中所述停车充电自动标定模块用于基于发动机部件状态、电机部件状态、高压电池部件状态,根据发动机基础特性确定停车充电控制参数的允许标定范围,根据允许标定范围确定待选标定组合,确保不超过发动机外特性、电机外特性、电机控制器允许充电功率范围以及电池允许充电功率范围;随后,通过两轮标定组合,在允许标定范围内测试不同充电转速和扭矩组合的平均充电效率,选择效率最高的组合作为最优组合;最后,将最优组合的控制参数标定至车辆控制单元的ram,并将相关部件状态和控制参数存储至车辆控制单元的eeprom,以实现高效且安全的停车充电控制。
10、优选地,在所述车辆控制单元中,在确定停车充电控制参数的允许标定范围之前包括:
11、车辆控制单元需要判断当前车辆的停车充电状态和停车充电自动标定请求是否符合预设条件。
12、优选地,所述预设条件包括:
13、停车充电状态的判定:当前车辆的车速低于一定值,且手刹已拉起,且发动机已启动,且离合器已结合,且变速箱已回空挡,以上条件均满足,则状态为1;否则为0;
14、停车充电自动标定请求:当前车辆未实现过自动标定,即车辆控制单元的eeprom中无最优组合,则自动标定请求为1;若距离上次自动标定已超过一定时间或里程,则自动标定请求为1;其他情况下,自动标定请求为0;
15、当车辆控制单元判断当前车辆的停车充电状态和停车充电自动标定请求均为1时,进入停车充电自动标定,否则不进入。
16、优选地,所述基于发动机部件状态、电机部件状态、高压电池部件状态,根据发动机基础特性确定停车充电控制参数的允许标定范围,根据允许标定范围确定待选标定组合,确保不超过发动机外特性、电机外特性、电机控制器允许充电功率范围以及电池允许充电功率范围,具体包括:
17、基于发动机部件状态、电机部件状态、高压电池部件状态,根据发动机基础万有特性确定发动机效率最高的工作点,得到发动机最优转速nb、发动机最优扭矩tb、发动机峰值转速nmax和发动机峰值扭矩tmax;然后基于发动机最优转速nb、发动机最优扭矩tb、发动机峰值转速nmax和发动机峰值扭矩tmax确定停车充电控制参数的允许标定范围;最后在允许标定范围内,将充电转速离散化成设定长度的序列,将充电扭矩离散化成设定长度的序列,将离散化后的充电转速和充电扭矩组合成多组待选标定组合,并剔除超出发动机外特性、电机外特性、电机控制器允许充电功率范围以及电池允许充电功率范围的待选标定组合,得到剔除后的待选标定组合作为第一轮标定组合。
18、优选地,所述停车充电控制参数的允许标定范围为:充电转速范围[nb-a%*nmax,nb+a%*nmax],扭矩范围[tb-a%*tmax,tb+a%*tmax],其中a根据经验值确定,其取值为5~15。
19、优选地,将充电转速离散化成长度为5的序列,所述序列为[nb-b%*nmax,nb-c%*nmax,nb,nb+c%*nmax,nb+b%*nmax],其中b、c根据经验值确定,b取值为4~12,c取值为2~6,且c<b<a。
20、优选地,将充电扭矩离散化成长度为5的序列,所述序列为[tb-b%*tmax,tb-c%*tmax,tb,tb+c%*tmax,tb+b%*tmax],其中b、c根据经验值确定,b取值为4~12,c取值为2~6,且c<b<a。
21、优选地,所述通过两轮标定组合,在允许标定范围内测试不同充电转速和扭矩组合的平均充电效率,选择效率最高的组合作为最优组合,具体包括:
22、将剔除后的待选标定组合作为第一轮标定组合,过测试各待选标定组合的平均充电效率,选择平均充电效率最高的组合作为第一轮优选组合(nb1,tb1),其中nb1表示第一轮优选组合中的发动机最优转速,tb1表示第一轮优选组合中的发动机最优扭矩;
23、基于第一轮优选组合(nb1,tb1),确定第二轮待选标定组合,进行第二轮标定,同样排除超限组合,再次测试各待选标定组合的平均充电效率,并选择平均充电效率最高的组合作为第二轮优选组合(nb2,tb2),即当前车辆状态下充电效率的最优组合,其中nb2表示第一轮优选组合中的发动机最优转速,tb2表示第一轮优选组合中的发动机最优扭矩。
24、优选地,所述测试各待选标定组合的平均充电效率的方法为:
25、ηi=avg(nice*tice/9550)/avg(ubat*ibat/1000)*100%
26、式中,nice为第i个组合处于稳态时的实时发动机转速;tice为第i个组合处于稳态时的实时发动机扭矩;ubat为第i个组合处于稳态时的实时高压电池电压;ibat为第i个组合处于稳态时的实时高压电池电流;ηi表示平均充电效率;avg表示平均值,是average的缩写。
27、优选地,所述基于第一轮优选组合(nb1,tb1),确定第二轮待选标定组合的方法为:
28、基于第一轮优选组合(nb1,tb1),将充电转速序列设置为[nb1-d%*nmax,nb1,nb1+d%*nmax],将充电扭矩序列设置为[tb1-d%*tmax,tb1,tb1+d%*tmax],其中nmax表示发动机峰值转速,tmax表示发动机峰值扭矩,d根据经验值确定,其取值为1~3。
29、本发明实施例还提供了一种停车充电控制参数的自动标定方法,所述方法采用上述所述的停车充电控制参数的自动标定系统,具体包括:
30、车辆控制单元通过can总线接收发动机控制单元的发动机部件状态、电机控制单元的电机部件状态以及电池管理系统的高压电池部件状态;
31、检查车辆是否处于停车充电状态,并确认是否接收到停车充电自动标定请求;
32、当车辆满足停车充电自动标定条件时,进入标定模式,车辆控制单元基于接收到的发动机部件状态,根据发动机基础特性确定停车充电控制参数的允许标定范围,根据允许标定范围确定待选标定组合,确保不超过发动机外特性、电机外特性、电机控制器允许充电功率范围以及电池允许充电功率范围;
33、通过两轮标定组合,在允许标定范围内测试不同充电转速和扭矩组合的平均充电效率,选择效率最高的组合作为最优组合;
34、将最优组合的控制参数标定至车辆控制单元的ram,并将相关部件状态和控制参数存储至车辆控制单元的eeprom;
35、退出标定模式,恢复正常的停车充电控制。
36、本发明实施例还提供了一种动力汽车,包括上述所述的停车充电控制参数的自动标定系统。
37、从以上技术方案可以看出,本发明申请具有以下有益效果:
38、(1)高效性与优化性:本发明技术方案通过自动标定系统,能够精确并快速地确定发动机在停车充电状态下效率最高的工作点。两轮标定过程确保了系统能够找到最优的控制参数组合,从而实现了高效且安全的停车充电控制。这种优化过程避免了人工标定的繁琐和可能导致的效率损失,提高了整个充电过程的效率。
39、(2)安全性与可靠性:系统在标定过程中始终确保不超过发动机外特性、电机外特性、电机控制器允许充电功率范围以及电池允许充电功率范围,从而有效避免了因超范围工作可能导致的部件损坏或安全风险。此外,实时记录和计算各部件的工作状态和充电效率,有助于系统及时发现异常情况并采取相应的保护措施,进一步增强了系统的安全性和可靠性。
40、(3)易用性与可维护性:本发明技术方案通过自动化和智能化的设计,简化了用户的操作流程,无需手动设置或调整控制参数,降低了使用门槛。同时,系统能够自动记录和存储相关部件状态和控制参数,为后续的维护和故障排查提供了便利。这种易用性和可维护性不仅提高了用户体验,也降低了系统的维护成本。
本文地址:https://www.jishuxx.com/zhuanli/20240905/288377.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表