基于毫米波雷达的司机状态点云探测方法
- 国知局
- 2024-09-05 15:01:43
本发明涉及毫米波雷达,具体涉及基于毫米波雷达的司机状态点云探测方法。
背景技术:
1、传统的驾驶员状态监测技术主要依赖于摄像头、红外传感器等设备,这些方法在一些情况下存在技术问题,具体来说,传统方法主要依赖于摄像头获取驾驶员的状态信息,但在夜间、恶劣天气或光照不良的情况下,视觉受限,无法准确获取驾驶员状态;在高速行驶或者复杂交通场景中,周围环境的干扰会影响传感器的准确性,导致监测结果不可靠;传统方法往往难以准确识别复杂的驾驶员状态,例如疲劳、分心、情绪等,需要更多维度和精准度的信息。
技术实现思路
1、本申请通过提供了基于毫米波雷达的司机状态点云探测方法,旨在解决传统的司机状态监测方法往往依赖于视觉或者传感器数据,存在视觉受限、环境干扰大、复杂场景识别难度大等技术问题。
2、鉴于上述问题,本申请提供了基于毫米波雷达的司机状态点云探测方法。
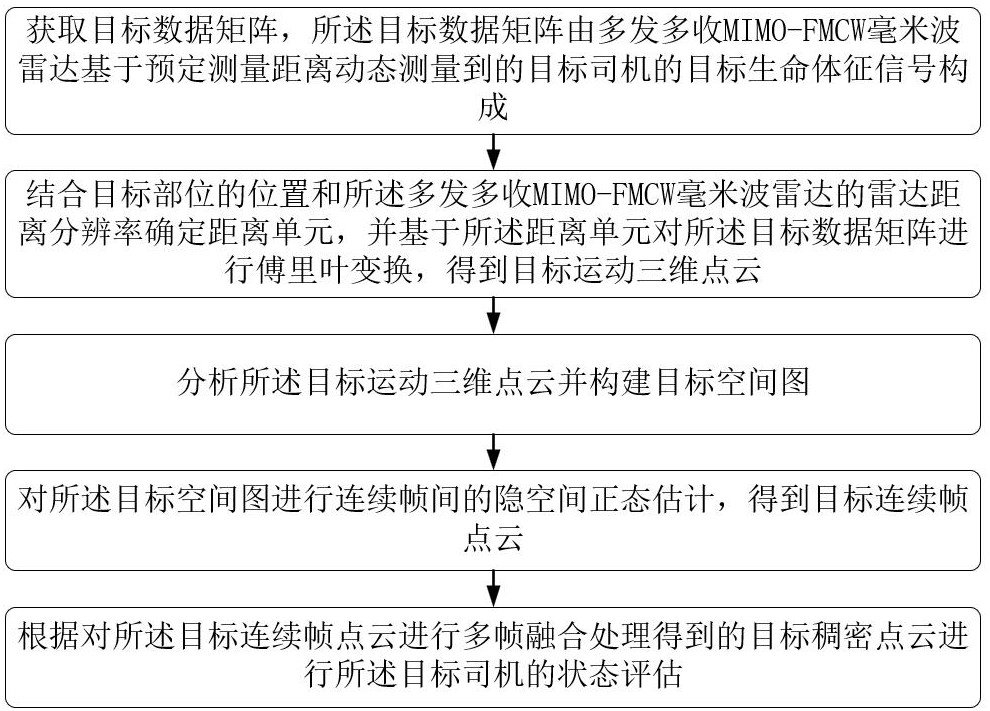
3、本申请公开的第一个方面,提供了基于毫米波雷达的司机状态点云探测方法,所述方法包括:获取目标数据矩阵,所述目标数据矩阵由多发多收mimo-fmcw毫米波雷达基于预定测量距离动态测量到的目标司机的目标生命体征信号构成;结合目标部位的位置和所述多发多收mimo-fmcw毫米波雷达的雷达距离分辨率确定距离单元,并基于所述距离单元对所述目标数据矩阵进行傅里叶变换,得到目标运动三维点云;分析所述目标运动三维点云并构建目标空间图;对所述目标空间图进行连续帧间的隐空间正态估计,得到目标连续帧点云;根据对所述目标连续帧点云进行多帧融合处理得到的目标稠密点云进行所述目标司机的状态评估。
4、本申请公开的第二个方面,提供了基于毫米波雷达的司机状态点云探测系统,所述系统用于上述基于毫米波雷达的司机状态点云探测方法,所述系统包括:目标数据矩阵获取模块,用于获取目标数据矩阵,所述目标数据矩阵由多发多收mimo-fmcw毫米波雷达基于预定测量距离动态测量到的目标司机的目标生命体征信号构成;傅里叶变换模块,用于结合目标部位的位置和所述多发多收mimo-fmcw毫米波雷达的雷达距离分辨率确定距离单元,并基于所述距离单元对所述目标数据矩阵进行傅里叶变换,得到目标运动三维点云;目标空间图构建模块,用于分析所述目标运动三维点云并构建目标空间图;隐空间正态估计模块,用于对所述目标空间图进行连续帧间的隐空间正态估计,得到目标连续帧点云;状态评估模块,用于根据对所述目标连续帧点云进行多帧融合处理得到的目标稠密点云进行所述目标司机的状态评估。
5、本申请中提供的一个或多个技术方案,至少具有如下技术效果或优点:
6、通过多发多收mimo-fmcw毫米波雷达,可以准确测量目标司机的目标生命体征信号,从而获得精准的目标数据矩阵;结合雷达距离分辨率和傅里叶变换,得到目标运动三维点云,实现对目标位置和运动的更加精确的描述;对目标空间图进行连续帧间的隐空间正态估计,并基于此得到目标连续帧点云,提高了对目标运动和变化的连续性分析能力;通过多帧融合处理得到的目标稠密点云,提高了对目标细节和状态的分析和评估能力,进一步提升了司机状态评估的准确性和全面性。综上所述,该基于毫米波雷达的司机状态点云探测方法解决了传统方法在视觉受限、环境干扰、复杂场景下识别难度大等问题,提高了对目标司机状态的监测和评估的准确性和可靠性。
7、上述说明仅是本申请技术方案的概述,为了能够更清楚了解本申请的技术手段,而可依照说明书的内容予以实施,并且为了让本申请的上述和其它目的、特征和优点能够更明显易懂,以下特举本申请的具体实施方式。
技术特征:1.基于毫米波雷达的司机状态点云探测方法,其特征在于,所述方法包括:
2.根据权利要求1所述基于毫米波雷达的司机状态点云探测方法,其特征在于,分析所述目标运动三维点云并构建目标空间图,包括:
3.根据权利要求2所述基于毫米波雷达的司机状态点云探测方法,其特征在于,对第一点云进行预处理得到第一预处理点云,包括:
4.根据权利要求2所述基于毫米波雷达的司机状态点云探测方法,其特征在于,得到所述第一目标属性的过程如下:
5.根据权利要求2所述基于毫米波雷达的司机状态点云探测方法,其特征在于,对所述目标空间图进行连续帧间的隐空间正态估计,得到目标连续帧点云,包括:
6.根据权利要求5所述基于毫米波雷达的司机状态点云探测方法,其特征在于,基于所述预定时空边缘决策对所述目标时空图进行边优化处理,得到所述目标连续帧点云,包括:
7.根据权利要求1所述基于毫米波雷达的司机状态点云探测方法,其特征在于,根据对所述目标连续帧点云进行多帧融合处理得到的目标稠密点云进行所述目标司机的状态评估,包括:
8.基于毫米波雷达的司机状态点云探测系统,其特征在于,用于实施权利要求1-7任一项所述的基于毫米波雷达的司机状态点云探测方法,所述系统包括:
技术总结本发明提供了基于毫米波雷达的司机状态点云探测方法,涉及毫米波雷达技术领域,包括:获取目标数据矩阵,由多发多收MIMO‑FMCW毫米波雷达基于预定测量距离动态测量到的目标司机的目标生命体征信号构成;结合目标部位的位置和雷达距离分辨率确定距离单元,对目标数据矩阵进行傅里叶变换,得到目标运动三维点云;分析构建目标空间图;对目标空间图进行连续帧间的隐空间正态估计,得到目标连续帧点云;根据对目标连续帧点云进行多帧融合处理得到的目标稠密点云进行所述目标司机的状态评估。本发明解决了传统的司机状态监测方法往往依赖于视觉或者传感器数据,存在视觉受限、环境干扰大、复杂场景识别难度大等技术问题。技术研发人员:吴芝序受保护的技术使用者:中北大学技术研发日:技术公布日:2024/9/2本文地址:https://www.jishuxx.com/zhuanli/20240905/289069.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表