基于锥形束CT的支气管术中导航方法、装置、设备及介质与流程
- 国知局
- 2024-09-11 14:27:49
本发明涉及医疗器械,尤其涉及一种基于锥形束ct的支气管术中导航方法、装置、设备及介质。
背景技术:
1、ct是computed tomography的简称,即计算机断层扫描。cbct就是cone beam ct的简称,即锥形束ct。
2、目前,cbct辅助定位的支气管术中导航通常有两种,一种是锥形束ct-3d影像的导航方式,实时锥形束ct-3d影像的成像时间长和射线剂量高,长时间的成像过程可能增加手术的风险和复杂性,而高射线剂量则可能对患者造成不必要的辐射伤害。另一种是单视角2d投影图像,因为2d图像缺乏深度信息,无法在术前3d图像上得到唯一的匹配点。虽然三维坐标需要满足在支气管结构内的限制条件,但在支气管分叉较多的复杂结构处,不同的支气管分支在深度方向上重叠,定位精度无法保证,极易映射到错误的支气管分支中,导致介入器械的虚拟坐标与其真实位置不匹配,使导航失败。因此,单视角2d投影图像的导航方式具有定位精度不高,复杂分支处错误率高的问题。
3、因此,有必要提出一种基于锥形束ct的支气管术中导航方法、装置、设备及介质以解决上述问题。
技术实现思路
1、本发明的目的在于提供一种基于锥形束ct的支气管术中导航方法、装置、设备及介质,用以改善锥形束ct-3d影像导航成像时间长和射线剂量高,单视角2d投影图像导航定位精度不高、复杂分支处错误率高的问题。
2、第一方面,本发明提供了一种基于锥形束ct的支气管术中导航方法,该方法包括:
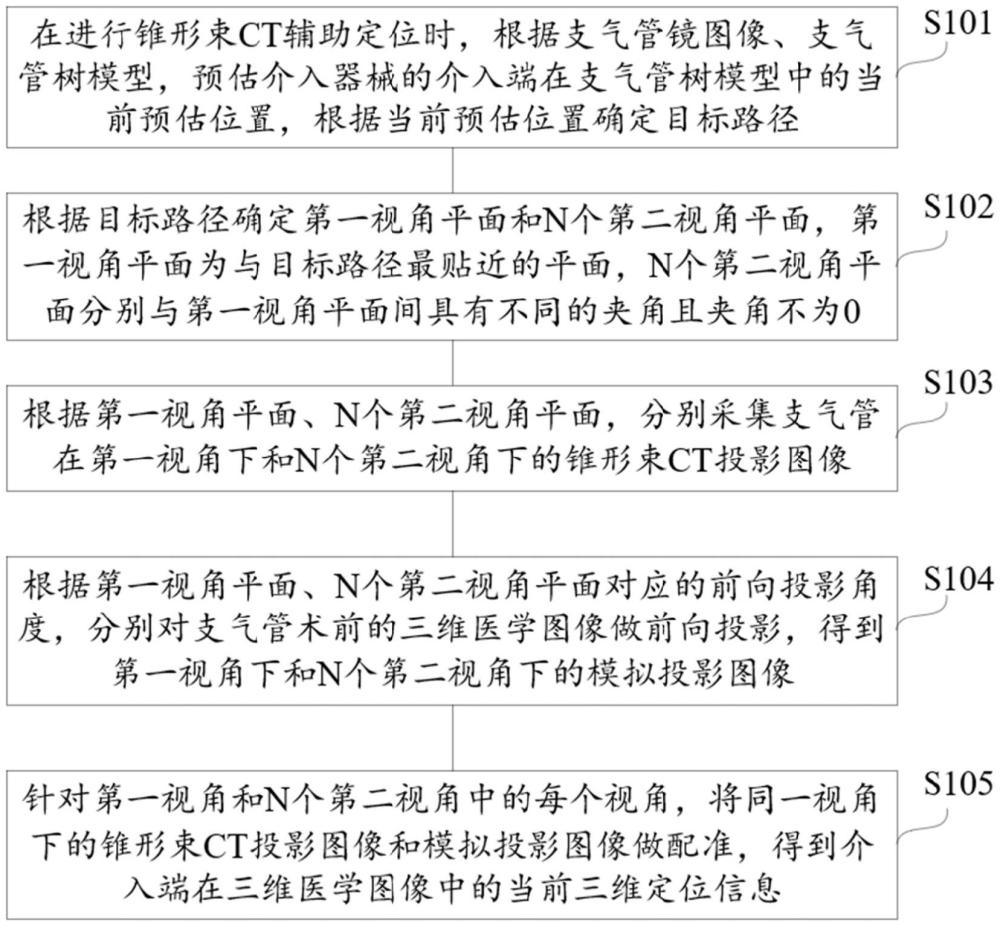
3、s101:在进行锥形束ct辅助定位时,根据支气管镜图像、支气管树模型,预估介入器械的介入端在所述支气管树模型中的当前预估位置,根据所述当前预估位置确定目标路径;
4、s102:根据所述目标路径确定第一视角平面和n个第二视角平面,第一视角平面为与所述目标路径最贴近的平面,n个第二视角平面分别与第一视角平面间具有不同的夹角且所述夹角不为0,n为正整数;
5、s103:根据第一视角平面、n个第二视角平面,分别采集支气管在第一视角下和n个第二视角下的锥形束ct投影图像;
6、s104:根据第一视角平面、n个第二视角平面对应的前向投影角度,分别对支气管术前的三维医学图像做前向投影,得到第一视角下和n个第二视角下的模拟投影图像;
7、s105:针对第一视角和n个第二视角中的每个视角,将同一视角下的锥形束ct投影图像和模拟投影图像做配准,得到介入端在所述三维医学图像中的当前三维定位信息。
8、在一种可能的实施例中,针对第一视角和n个第二视角中的每个视角,将同一视角下的锥形束ct投影图像和模拟投影图像做配准,得到介入端在所述三维医学图像中的当前三维定位信息,包括:
9、针对第一视角和n个第二视角中的每个视角,将同一视角下的锥形束ct投影图像和模拟投影图像做配准,得到第一视角和n个第二视角对应的形变场,其中,所述锥形束ct投影图像为固定图像,所述模拟投影图像为浮动图像;
10、根据第一视角和n个第二视角对应的形变场、第一视角下和n个第二视角下的锥形束ct投影图像中介入端的位置信息,得到第一视角下和n个第二视角下的模拟投影图像中介入端的位置信息;
11、根据第一视角下和n个第二视角下的模拟投影图像中介入端的位置信息,得到介入端在所述三维医学图像中的当前三维定位信息。
12、在一种可能的实施例中,针对第一视角和n个第二视角中的每个视角,将同一视角下的锥形束ct投影图像和模拟投影图像做配准,得到第一视角和n个第二视角对应的形变场,包括:
13、针对第一视角和n个第二视角中的每个视角,将同一视角下的锥形束ct投影图像和模拟投影图像进行特征点匹配,得到第一视角和n个第二视角对应的特征点对;
14、根据第一视角和n个第二视角对应的特征点对,计算得到第一视角和n个第二视角对应的仿射变换矩阵;
15、根据第一视角和n个第二视角对应的仿射变换矩阵,得到第一视角和n个第二视角对应的形变场。
16、在一种可能的实施例中,根据第一视角和n个第二视角对应的仿射变换矩阵,得到第一视角和n个第二视角对应的形变场之前,还包括:
17、根据第一视角和n个第二视角对应的特征点对的位置、第一视角和n个第二视角对应的互信息值,得到第一视角和n个第二视角对应的局部弹性变换矩阵;
18、根据第一视角和n个第二视角对应的仿射变换矩阵,得到第一视角和n个第二视角对应的形变场,包括:
19、根据第一视角和n个第二视角对应的仿射变换矩阵、局部弹性变换矩阵,得到第一视角和n个第二视角对应的形变场。
20、在一种可能的实施例中,针对第一视角和n个第二视角中的每个视角,将同一视角下的锥形束ct投影图像和模拟投影图像进行特征点匹配,得到第一视角和n个第二视角对应的特征点对之后,还包括:
21、从第一视角和n个第二视角对应的特征点对中剔除错误的特征点对,得到第一视角和n个第二视角对应的剔除后特征点对;
22、根据第一视角和n个第二视角对应的特征点对,计算得到第一视角和n个第二视角对应的仿射变换矩阵,包括:
23、根据第一视角和n个第二视角对应的剔除后特征点对,计算得到第一视角和n个第二视角对应的仿射变换矩阵。
24、在一种可能的实施例中,根据所述当前预估位置确定目标路径,包括:
25、在所述支气管树模型的规划路径上选取与所述当前预估位置临近的一段曲线作为第一提示路径,将包括所述第一提示路径且小于整个所述规划路径的m个曲线范围确定为m个第二提示路径,m为正整数;
26、响应于用户的选择指令确定目标路径,所述选择指令包括所述第一提示路径、m个所述第二提示路径、整个所述规划路径中的一种。
27、在一种可能的实施例中,该方法还包括步骤s106:
28、将所述当前三维定位信息映射至所述三维医学图像和所述支气管树模型上,以供导航参考。
29、在一种可能的实施例中,该方法还包括步骤s107:
30、在所述支气管树模型的支气管树点云上找到所述当前三维定位信息的最邻近点,将所述最邻近点显示在所述支气管树模型上,以判断所述介入端当前是否在所述支气管树模型的规划路径上。
31、第二方面,本发明实施例中还提供了一种基于锥形束ct的支气管术中导航装置,该装置包括执行上述第一方面的任意一种可能的设计的方法的模块/单元。这些模块/单元可以通过硬件实现,也可以通过硬件执行相应的软件实现。
32、第三方面,本发明实施例中还提供了一种电子设备,包括处理器和存储器。其中,存储器用于存储一个或多个计算机程序;当存储器存储的一个或多个计算机程序被处理器执行时,使得该电子设备能够实现上述第一方面的任意一种可能的设计的方法。
33、第四方面,本发明实施例中还提供了一种计算机可读存储介质,计算机可读存储介质包括计算机程序,当计算机程序在电子设备上运行时,使得电子设备执行上述第一方面的任意一种可能的设计的方法。
34、第五方面,本发明实施例中还提供了一种包含计算机程序产品,当所述计算机程序产品在电子设备上运行时,使得所述电子设备执行上述任一方面的任意一种可能的设计的方法。
35、本发明的有益效果在于:采集至少两个视角的锥形束ct投影图像,可以得到准确的深度信息,与三维医学图像对应视角的模拟投影图像做配准,可获得更准确的三维定位信息,并且具有成像时间短、射线剂量低的优点。另外,选择与所述目标路径最贴近的平面作为第一视角平面,可最直观地反映介入器械应力产生的弹性形变,提高了配准精度,提高了三维定位精度。
本文地址:https://www.jishuxx.com/zhuanli/20240911/290948.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。