机器视觉上料系统、机器视觉上料方法及计算机程序产品与流程
- 国知局
- 2024-10-09 15:47:06
本发明涉及一种机器视觉上料系统,特别是基于柔性振动盘的机器视觉上料系统,并且本发明还涉及一种机器视觉上料方法以及相关的计算机程序产品。
背景技术:
1、随着人工智能技术的快速发展,机器视觉(识别)技术作为人工智能的一个分支同样得到了飞速发展。简单说来,机器视觉技术就是用机器代替人眼来做测量和判断。机器视觉系统是通过机器视觉产品(即,图像采集装置)将采集到的目标转换成图像信号(数据),输送给专用的图像处理系统,继而得到采集到的目标的形态信息,随后根据像素分布、亮度和颜色等信息,转变成数字化信号;图像系统对这些图像数据进行各种运算来提取目标的特征,进而根据判定的结果来控制现场的设备动作。
2、机器视觉系统的特点是提高了生产的灵活性和自动化程度。故而,在现代自动化生产过程中,人们将机器视觉系统广泛地用于产品装载和成品检验等领域。
3、柔性振动盘是一种自动装载辅助送料设备,在实际应用中,通常配合机器视觉技术和机器人臂自动完成对物料的选拣和装载(这一过程合称为“上料”)。
4、在现有技术中,由柔性振动盘、机器视觉装置和机器人臂共同构成的机器视觉上料系统得到了广泛的使用。
5、在现有的市售机器视觉上料系统中,通常不对上料后的成品(即,装载有物料的产品)的质量进行检验,故而,成品中可能存在漏装或装偏的问题。
6、为了识别成品的质量,厂家通常需要另外添加额外的机器视觉装置以单独对成品进行质量检验,这不可避免地提高了系统的整体构建成本并相应增大了设备维护难度。
7、为此,业内对于能够利用同一图像采集装置以较为精确的方式实现选料装载及成品质量检验的机器视觉上料系统以及利用该机器视觉上料系统实施的机器视觉上料方法存在一种需要。
技术实现思路
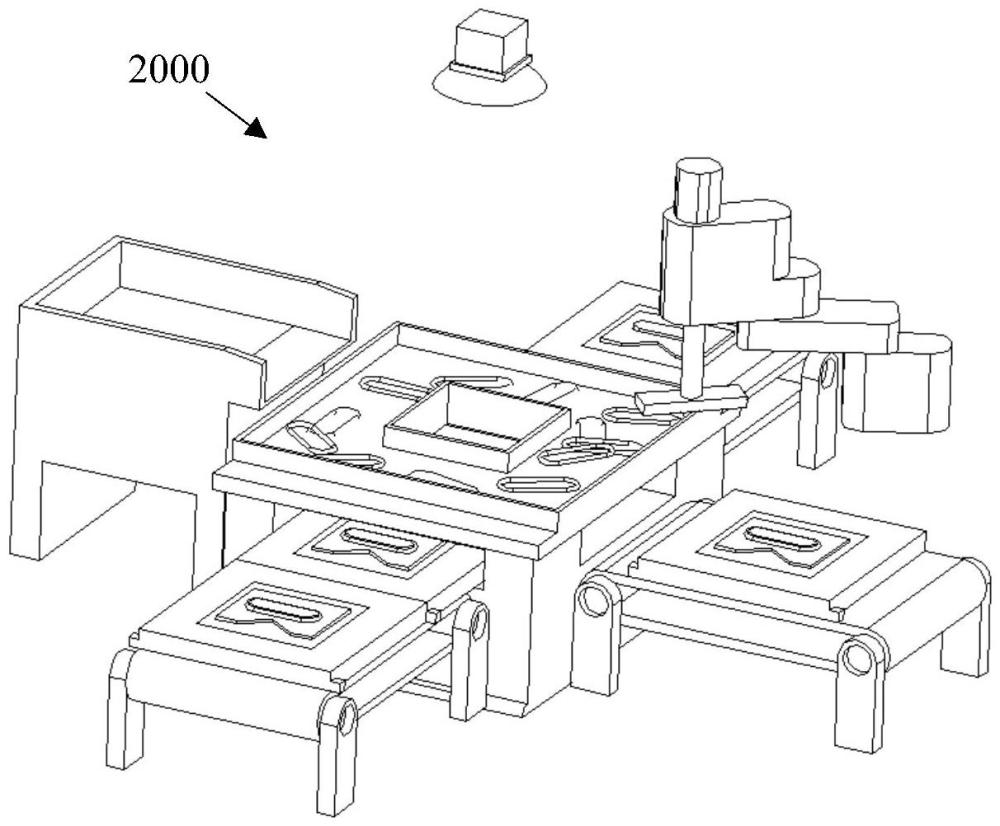
1、为了实现上述目的,本发明提供了一种机器视觉上料系统,包括:上料装置、柔性振动盘、控制单元、机器人臂以及图像采集装置。所述上料装置被配置成用于提供待选物料。所述柔性振动盘被配置成用于通过振动调整从所述上料装置接收到的所述待选物料的静置状态,其中,所述柔性振动盘具有载物表面。所述载物表面被划分为:选拣区,所述选拣区被配置成用于接收所述待选物料;和装载区,所述装载区被配置成用于接收待装产品,其中,所述装载区与所述选拣区通过被相对于所述载物表面固定的屏障间隔开,以防止所述待选物料因所述振动而误入所述装载区。所述控制单元被配置成用于从所述选拣区中的所述待选物料中选定符合选拣要求的目标物料。所述机器人臂被配置成用于基于来自所述控制单元的指令拾取所述目标物料并将所述目标物料装载到位于所述装载区中的所述待装产品上,以获得成品。所述图像采集装置被配置成用于采集所述选拣区的区域图像以及所述装载区中的所述成品的装载图像,其中,所述控制单元被进一步配置成用于基于由所述图像采集装置采集到的图像来确定所述成品是否为符合装载要求的良品。
2、本发明还提供了一种机器视觉上料方法。所述机器视觉上料方法被使用前述机器视觉上料系统来执行,并包括如下步骤:所述图像采集装置进行基准图像采集;所述上料装置向所述柔性振动盘的所述选拣区提供所述待选物料;使所述柔性振动盘振动,以使所述待选物料处于所述静置状态;所述图像采集装置采集所述选拣区的区域图像并将所述区域图像输送到所述控制单元;所述控制单元基于所述区域图像提取所述待选物料中的每一个的物料图像,并基于所述物料图像确定所述目标物料;将所述待装产品放置于所述装载区中;所述机器人臂根据所述控制单元的指令拾取所述目标物料,并将所述目标物料装载到所述待装产品中,以获得所述成品;所述图像采集装置采集所述装载区中的所述成品的装载图像;所述控制单元基于所述图像采集装置采集到的图像判定所述成品是否为良品;以及将所述成品从所述装载区移除。
3、本发明还提供了一种计算机程序产品,其内存储有指令,在被执行时,所述指令致使前述机器视觉上料系统执行前述机器视觉上料方法。
4、利用根据本发明的机器视觉上料系统、机器视觉上料方法及相关的计算机程序产品能够利用同一图像采集装置以较为精确的方式实现选料装载,且在不显著增加成本的情况下,能够更好地实现对于成品的质量检验。
技术特征:1.一种机器视觉上料系统,包括:
2.根据权利要求1所述的机器视觉上料系统,其中,
3.根据权利要求2所述的机器视觉上料系统,其中,所述良品图像是在能够被判定为良品的成品位于所述装载区中的情况下由所述图像采集装置采集到的被判定为良品的所述成品的图像,并且所述目标物料图像是被基于所述良品图像获得的。
4.根据权利要求1所述的机器视觉上料系统,其中,所述选拣要求被基于所述待装产品中的用于接收所述目标物料的结构而确定的对于所述目标物料的所述静置状态的要求,所述静置状态包括取向、大小和形状中的至少一项。
5.根据权利要求1所述的机器视觉上料系统,其中,
6.根据权利要求1-5中的任一项所述的机器视觉上料系统,其中,
7.根据权利要求1-5中的任一项所述的机器视觉上料系统,其中,所述柔性振动盘包括:
8.根据权利要求7所述的机器视觉上料系统,其中,产品在所述产品输送通道上的输送由传送带来实现;以及
9.根据权利要求8所述的机器视觉上料系统,其中,在所述传送带沿着所述柔性振动盘的所述产品输送通道延伸的情况下,所述传送带被划分成多个区段,所述多个区段中的每一个都倍配置成能够与所述产品升降区相匹配且设置有能够被举升的活动部件。
10.根据权利要求8所述的机器视觉上料系统,其中,
11.根据权利要求10所述的机器视觉上料系统,其中,所述传送带被配置成在所述控制单元将所述成品判定为良品时,继续运行以将所述成品输送到所述良品区,并且在所述控制单元判定所述成品为非良品且在所述执行机构复位之后,继续运行。
12.根据权利要求10所述的机器视觉上料系统,其中,所述控制单元被配置成在将所述成品判定为非良品之后,在所述执行机构执行所述移动操作之前,对所述待修区中的非良品的数量进行判定。
13.根据权利要求7所述的机器视觉上料系统,其中,所述机器视觉上料系统包括升降机构,所述升降机构被配置成用于举升处于所述产品升降区中的所述待装产品。
14.根据权利要求13所述的机器视觉上料系统,其中,所述基座设置有容置孔,所述容置孔被配置成用于在组装状态下与所述柔性振动台的所述装载区的位置相对应,并且所述容置孔为盲孔或通孔;
15.根据权利要求14所述的机器视觉上料系统,其中,所述升降机构在所述举升状态下具有上限位置和下限位置,在所述上限位置中,所述升降机构被配置成用于将举升的产品置于与所述屏障的远离所述选拣区的上边缘齐平的位置,在所述下限位置中,所述升降机构被配置成用于将所述举升的产品置于与所述选拣区共面的位置。
16.一种机器视觉上料方法,其中,所述机器视觉上料方法被使用根据权利要求1-15中的任一项所述的机器视觉上料系统来执行,并包括如下步骤:
17.根据权利要求16所述的机器视觉上料方法,其中,所述图像采集装置进行基准图像采集的步骤包括:
18.根据权利要求17所述的机器视觉上料方法,其中,所述控制单元通过将所述物料图像与所述目标物料图像进行比对来确定所述目标物料,以及通过将所述装载图像与所述良品图像进行比对来判定所述成品是否为良品。
19.根据权利要求15-17中的任一项所述的机器视觉上料方法,其中,在使用根据权利要求1-6中的任一项所述的机器视觉上料系统来执行所述机器视觉上料方法的情况下,通过另外设置的副机器人臂来实现所述待装产品的放置以及所述成品的移除;
20.根据权利要求16-18中的任一项所述的机器视觉上料方法,其中,在使用根据权利要求7-15中的任一项所述的机器视觉上料系统来执行所述机器视觉上料方法的情况下,所述视觉上料方法包括通过传送带来实现所述待装产品的输送和所述成品的移除。
21.根据权利要求20所述的机器视觉上料方法,其中,所述机器视觉上料方法还包括:
22.根据权利要求21所述的机器视觉上料方法,其中,在使所述成品返回到所述产品升降区之后,所述机器视觉上料方法进一步包括:
23.一种计算机程序产品,其内存储有指令,在被执行时,所述指令致使根据权利要求1-15中的任一项所述的机器视觉上料系统执行根据权利要求16-22中的任一项所述的机器视觉上料方法。
技术总结本发明提供了一种机器视觉上料系统。该机器视觉上料系统包括:柔性振动盘,其载物表面被划分为选拣区和装载区,其通过被相对于载物表面固定的屏障间隔开,以防止待选物料因柔性振动盘的振动而误入装载区;图像采集装置,其被配置成用于采集选拣区的区域图像以及装载区中的成品的装载图像;以及控制单元,其被配置成用于基于由图像采集装置采集到的图像来确定成品是否为符合装载要求的良品。本发明还提供了一种使用上述上料系统的机器视觉上料方法及一种计算机程序产品。利用本发明的机器视觉上料系统和方法,能够利用同一图像采集装置以较为精确的方式实现选料装载,且在不显著增加成本的情况下,能够更好地实现对于成品的质量检验。技术研发人员:朱权兵,王瑞东,郭庆受保护的技术使用者:博世力士乐(西安)电子传动与控制有限公司技术研发日:技术公布日:2024/9/26本文地址:https://www.jishuxx.com/zhuanli/20240929/310094.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表