隧道衬砌表面裂缝检测装置、方法、介质及设备
- 国知局
- 2024-10-09 14:49:01
本发明涉及隧道工程监测,具体涉及一种隧道衬砌表面裂缝检测装置。
背景技术:
1、现有的裂缝检测工作主要由人工方法完成。人工方法采用人眼定位判别、手工描绘等方式识别裂缝并记录其分布与形状,采用游标卡尺、裂缝显微镜等工具测量裂缝的宽度;实践证明,人工损伤检查准确性差、主观性强、容易造成遗漏与错误。
技术实现思路
1、本发明目的在于提供一种能够快速采集隧道数据、精准识别隧道裂缝的隧道衬砌表面裂缝检测装置,具体技术方案如下:
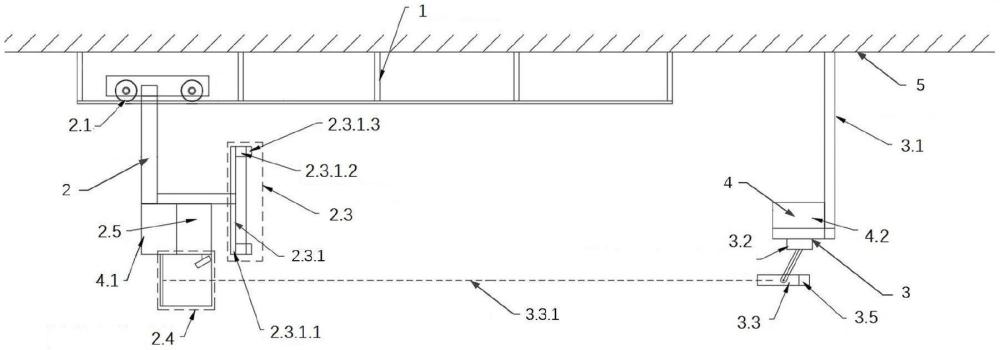
2、本发明提供一种隧道衬砌表面裂缝检测装置,包括轨道、检测模块、定位模块、处理模块和识别模块;
3、所述轨道设置于隧道顶部,且所述轨道沿隧道中轴线的方向设置;
4、所述检测模块滑动设置于所述轨道上,用于扫描和拍摄隧道衬砌表面分别得到隧道图像和三维点云;
5、所述定位模块设置于隧道入口的顶部中轴线处,所述定位模块用于测定所述检测模块的实时位置;
6、所述处理模块分别与所述检测模块和所述定位模块电连接,所述处理模块用于处理隧道图像和三维点云数据以及所述检测模块的实时位置数据以得到隧道衬砌表面的隧道全线二衬平面图;
7、所述识别模块与所述处理模块电连接,所述识别模块用于识别隧道二衬平面图中的裂缝。
8、可选地,所述定位模块包括安装架、旋转元件、激光测距元件和第一电子罗盘,所述安装架设置于所述隧道顶部;所述旋转元件设置于所述安装架上,且所述旋转元件的输出轴与所述激光测距元件连接;所述激光测距元件用于向所述检测模块发射激光以测定所述定位模块与所述检测模块之间的距离;所述第一电子罗盘设置于所述安装架上,所述第一电子罗盘用于检测所述定位模块的方位角和倾角。
9、可选地,所述检测模块包括驱动元件、安装主体、检测元件、图像定位元件和第二电子罗盘,所述驱动元件滑动设置于所述轨道上,所述安装主体与所述驱动元件连接;
10、所述检测元件包括多个沿所述安装主体周向设置的检测单件;
11、所述检测单件包括机械臂、激光雷达和第一相机,所述机械臂与所述安装主体转动连接;所述激光雷达和所述第一相机均设置于所述机械臂上,所述激光雷达用于扫描隧道衬砌表面,所述第一相机用于拍摄对应激光雷达的扫描范围内的隧道衬砌表面;
12、所述图像定位元件包括设置于所述安装主体上的网格靶标和第二相机,所述网格靶标用于接收所述激光测距元件发射的激光线;所述第二相机正对所述网格靶标设置,所述第二相机用于拍摄所述网格靶标;
13、所述第二电子罗盘设置于所述安装主体上,所述第二电子罗盘用于检测所述检测模块的方位角和倾角。
14、可选地,所述处理模块包括第一控制组件和第二控制组件,所述第一控制组件设置于所述安装主体上,所述第一控制组件分别与所述检测模块和所述识别模块电连接;所述第二控制组件设置于所述安装架上,所述第二控制组件分别与所述定位模块和所述第一控制组件电连接。
15、本发明还提供一种隧道衬砌表面裂缝检测方法,采用如权利要求4所述的隧道衬砌表面裂缝检测装置进行隧道衬砌表面裂缝的检测,其特征在于,包括如下步骤:
16、s1:安装隧道衬砌表面裂缝检测装置,具体是:将隧道全线划分为多个区域,一区域对应设置一检测单件,标定激光雷达、第一相机外参和第一相机内参,并同步激光雷达和第一相机的时间戳;
17、s2:采用隧道衬砌表面裂缝检测装置扫描并拍摄各个区域的隧道衬砌表面形成彩色点云;
18、s3:依据icp算法对各个区域的彩色点云进行配准得到隧道全线的三维点云,并将隧道全线的三维点云根据点云展开算法展开得到二维点云,再将二维点云进行投影,得到隧道全线二衬平面图;
19、s4:将隧道全线二衬平面图进行裁剪和填充后输入至基于u-net算法的裂缝检测模型中识别出隧道全线二衬平面图中的裂缝,并获取裂缝的像素坐标、长度和宽度;
20、s5:根据像素坐标之间的关系将识别出的裂缝复现到隧道全线二衬平面图中,并根据二维点云投影算法反算出裂缝在二维点云中的位置,然后再依据点云展开算法反算出裂缝在三维点云中的位置。
21、可选地,所述s1中,一激光雷达的扫描视界角度大于70°,相邻设置的两个激光雷达的重复扫描范围为10%-30%;第一相机的拍摄范围覆盖对应激光雷达的扫描范围;
22、所述s2包括:
23、s2.1、启动检测模块的驱动元件,使检测模块沿轨道移动,利用激光雷达扫描该区域的隧道衬砌表面形成三维点云,同时第一相机拍摄各个区域的隧道衬砌表面得到各个区域的隧道图像;
24、s2.2、构建局部坐标系,以局部坐标系为标准将激光雷达扫描得到的点云坐标实时调整为局部坐标系下的施工坐标,其中:局部坐标系以定位模块的中心为原点o,以竖直方向为z轴,以隧道中轴线方向为y轴,以垂直yoz平面且过原点的直线方向为x轴;具体是:
25、s2.2.1、根据固定安装距离计算得到激光测距元件的发射点位坐标(a0,b0,c0),并根据发射点位坐标计算激光落点的局部坐标(a1,b1,c1),具体计算公式如下:
26、
27、其中:l1为激光测距元件测得的网格靶标与定位模块之间的距离;α1为第一电子罗盘测得的实时方位角,β1为第一电子罗盘测得的倾角,α0为第一电子罗盘测得y轴方向的初始方位角;
28、s2.2.2、利用第二相机拍摄得到网格靶标图像,其中:网格靶标图像由白色、绿色和红色组成;
29、s2.2.3、计算出激光点与网格靶标中心点的实际差值;
30、s2.2.4、根据第二电子罗盘测得的方位角和倾角,计算出网格靶标上中心点的坐标(a2,b2,c2),具体计算公式如下:
31、
32、其中:δj为激光点和网格靶标中心点的竖向像素坐标差值;δk为激光点和网格靶标中心点的水平像素坐标差值;为单一像素实际尺寸的平均值;α2为第二电子罗盘测得的方位角,β2为第二电子罗盘测得的倾角;
33、s2.2.5、根据激光雷达和第二相机的固定距离分别计算出激光雷达和第二相机的坐标,将各个激光雷达扫描的点云坐标转化为局部坐标系下的施工坐标;
34、s2.3、根据第一相机的外参将三维点云的施工坐标投影到第一相机的uv坐标系中,并获取三维点云中各点在对应隧道图像对应位置的像素值;
35、s2.4、将像素值分别赋予给各点形成各个区域的彩色三维点云。
36、可选地,所述s3包括:
37、s3.1、采用统计滤波算法剔除三维点云中的离散点;
38、s3.2、利用icp算法对各区域的彩色点云进行配准得到隧道全线的三维点云,并通过八叉树算法遍历检索隧道全线的三维点云,剔除重复点;
39、s3.3、根据隧道断面轮廓线将隧道全线的三维点云根据点云展开算法展开得到二维点云,具体是:
40、将三维点云中直线段点云的坐标(x′,y′,z′)转换至xoy平面的坐标(x,y,z),具体计算公式如下:
41、
42、其中:g为旋转矩阵,t为平移量矩阵;
43、将三维点云中圆弧段范围内点云坐标(xi,yi,zi)按照圆弧构成的圆柱公式展开得到二维点云中的点云坐标(xi′,yi′,zi′),具体计算公式如下:
44、
45、其中:θi为任一点(xi,yi,zi)与圆心中轴线和节点与圆心中轴线构成的节点平面之间的夹角,节点为该圆弧段与其他圆弧段、直线段的交点(x1,y1,z1);为隧道中轴线与xoz平面之间的夹角;(x0,y0,z0)为圆心中轴线在某一隧道横断面的坐标;
46、s3.4、将二维点云投影至xoy平面得到隧道全线二衬平面图,具体是:
47、s3.4.1、依据隧道中轴线和断面二衬周长在xoy平面设计出隧道平面空图;
48、s3.4.2、将隧道平面空图划分为1mm×1mm的栅格;
49、s3.4.3、将二维点云中的纵坐标设置为0,即可将点云投影至隧道平面空图;
50、s3.4.4、统计每一个栅格内的点云的像素值,取其平均值作为该栅格的像素值;
51、s3.4.5、由每一个栅格组成一个像素点,形成隧道全线二衬平面图。
52、可选地,所述s4包括:
53、s4.1、首先利用labelme软件处理其他隧道的衬砌裂缝图像,制作成设定尺寸的裂缝标签图像;然后利用u-net算法对制作的裂缝标签图像进行训练学习从而建立起隧道裂缝语义分割模型。
54、s4.2、按照u-net要求输入的设定尺寸裁剪s3.4.5中的隧道全线二衬平面图得到裁剪后的合规图像,对于尺寸不足的部分采用空白像素进行填充,然后按照与起始点距离和从隧道左侧至隧道右侧对裁剪后的合规图像进行逐一编号;
55、s4.3、将裁剪后的合规图像输入到隧道裂缝语义分割模型进行识别,并提取其掩码获取相应的像素坐标;
56、s4.4、将所有识别后的图像按照编号拼接形成隧道全线裂缝识别结果图,计算出各个裂缝在隧道全线裂缝识别结果图中的像素坐标。
57、本发明还提供一种计算机可读存储介质,其上存储有计算机程序指令,当所述计算机程序指令被处理器执行时实现如上所述的隧道衬砌表面裂缝检测方法。
58、本发明还提供一种电子设备,包括:至少一个处理器、至少一个存储器以及存储在所述存储器中的计算机程序指令,当所述计算机程序指令被所述处理器执行如上所述的隧道衬砌表面裂缝检测方法。
59、应用本发明的技术方案,检测模块在隧道顶部的轨道上移动的同时,对隧道衬砌表面进行扫描得到隧道衬砌表面的三维点云,且定位模块能够测定检测模块的实时位置,并通过处理模块处理隧道衬砌表面的三维点云数据和检测模块的实时位置数据得到隧道全线二衬平面图,最后通过识别模块识别隧道全线二衬平面图中的裂缝。本发明中通过定位模块和检测模块能够快速地采集隧道衬砌表面的数据,并通过处理模块对数据进行处理以提高识别模块识别隧道全线二衬平面图中的裂缝的精度。
60、除了上面所描述的目的、特征和优点之外,本发明还有其它的目的、特征和优点。下面将参照图,对本发明作进一步详细的说明。
本文地址:https://www.jishuxx.com/zhuanli/20241009/306622.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表