基于北斗短报文、无人机的列车实时定位系统及方法与流程
- 国知局
- 2024-10-15 09:33:49
本发明涉及铁路信号,特别是涉及一种基于北斗短报文、无人机的列车实时定位系统及方法。
背景技术:
1、北斗卫星导航系统是由中国自主研发建设的全球卫星导航系统,由卫星组网和地面监控站组成。其中,北斗短报文通信系统能提供用户与用户间14000比特相当于1000个汉字的通信服务,具备高可靠性、广覆盖和低成本的优点,尤其在偏远地区或救灾抢险地区,卫星通信具有较高的安全性和稳定性。用户终端可通过北斗卫星与主控站进行双向短报文通信,实现端到端的北斗短报文通信。
2、5g-r(5g-railway)是基于5g技术的铁路新一代移动通信系统,属于铁路运输行业的专网。国内5g-r的工作频段是2100mhz,采用fdd制式,是铁路现有gsm-r标准的升级替代。5g-r可用于铁路正线车地通信、铁路站场、铁路沿线基础设施和车辆内部通信等场景,在组网方式和性能要求上与公网5g存在较大不同,是铁路行业内安全可靠的新一代通信专网。
3、列车在行驶过程中,地面管路中心需要实时了解列车的位置状态和运行数据。其中,列车运行数据包括列车牵引系统数据、制动数据、列车网络控制数据和列车运行安全数据。现有的列车数据采集主要由人工收集,效率低下。人工检测车辆各分系统数据容易漏检,且无法在列车运行过程中实时收集列车各子系统数据。尤其地,在铁路货运中,铁路运输人员和货物货主都需要及时准确地了解到货物位置和运输状态。在现有的货运调度系统中,调度人员主要通过列车确报系统查看货物的位置和状态信息,当运输过程存在变动时,列车确报无法及时地反映出货物状态变化。
4、现有铁路列车定位方式主要有两种,一种是通过在轨旁安装轨道电路或计轴设备,利用轨道占用空间定位列车位置,另一种是通过安装列车车载测速测距模块配合地面应答器,将列车运行数据传送至地面控制端。现有列车定位方法存在如下问题:1、铁路正线轨道旁边需要安装轨旁地面应答器,轨旁设备安装维护的工作量大,长期暴露在外易损坏,后期轨旁设备维护较为困难;2、铁路线路有线性分布的特点,应答器通信范围为圆形,地面应答器单向通信需要部署大量的地面通信基站,且无线接入点建设成本高,偏远地区的通信易受干扰;3、机车车辆在偏远地区和山区隧道通信信号差,地面运输调度人员获取铁路机车和车辆的位置较困难。
5、采用可移动式且具有一定飞行高度的无人机作为通信中继基站不失为一种较好办法。无人机作为飞行的通信无线中继器,为基站扩展所能覆盖的通信范围,为受到障碍物遮挡的用户提供容量的提升。
6、在通信障碍区,火车车辆上5g和北斗短报文通信终端无法连接地面基站,需要通过多跳通信的形式与无人机携带的中继基站进行通信连接,携带中继基站的无人机的飞行轨迹和悬停位置影响了用户通信吞吐量和路径损耗,因此,对无人机飞行轨迹和用户通信吞吐量进行优化,是需要解决的技术问题。
技术实现思路
1、为了解决上述现有技术中的不足,本发明的目的是提供一种基于北斗短报文、无人机的列车实时定位系统及方法,结合北斗短报文通信和铁路现有移动通信技术,解决了列车机车和车辆无法实时定位、定位准确度低和调度指挥中心无法实时获取列车运行数据的问题,并采用双q网络(ddqn)算法及训练后的模型能够帮助无人机规划最优的飞行路径和最大通信吞吐量,能够有效的解决对飞行状态控制的过度估计问题,优化无人机的飞行轨迹及无人机辅助列车通信的吞吐量和路径损耗。
2、本发明解决其技术问题所采用的技术方案为:
3、提供了一种基于北斗短报文、无人机的列车实时定位系统,包括铁路机车定位传输单元及车辆定位传输单元,所述铁路机车定位传输单元及车辆定位传输单元均包括中央处理器装置,所述中央处理器装置通信连接有北斗卫星短报文通信装置、5g-r通信装置、卫星导航装置及数据采集装置;
4、还包括无人机辅助列车空地通信装置。
5、进一步的,所述铁路机车定位传输单元及车辆定位传输单元还包括太阳能板装置,所述太阳能板装置导线连接有电池组装置,所述电池组装置用于为定位传输单元提供电能。
6、进一步的,所述铁路机车定位传输单元包括通信连接的机车定位传输子单元和天线子单元,其中所述机车定位传输子单元安装于铁路机车司机室内部,所述天线子单元安装于机车外部顶端,所述机车定位传输子单元和机车牵引系统、制动系统、列车网络系统间进行通信连接;
7、或者,
8、所述车辆定位传输单元包括铁路客车定位传输单元和铁路货车定位传输单元,所述铁路客车定位传输单元包括车辆定位传输子单元、天线子单元和电源子单元,安装于铁路客车a端或b端;所述铁路货车定位传输单元包括车辆定位传输子单元、天线子单元和电源子单元,安装于铁路货车a端或b端;其中铁路货车车型包括铁路敞车、棚车、平车、罐车、集装箱车、漏斗车、保温车和特种货车。
9、使用基于北斗短报文、无人机的列车实时定位系统进行列车定位的方法,包括以下步骤:
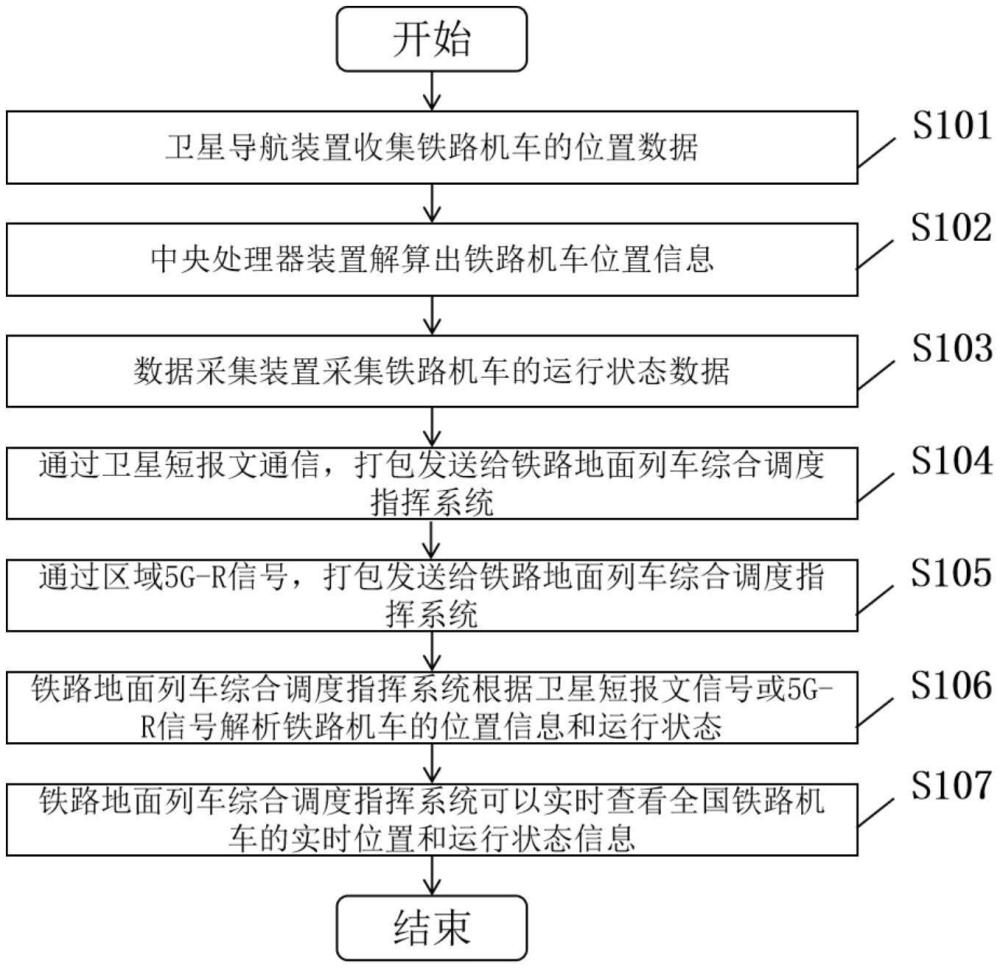
10、(1)铁路机车定位传输单元和车辆定位传输单元的卫星导航装置分别采集铁路机车和车辆的位置数据、数据采集装置分别采集铁路机车和车辆的运行状态数据;
11、(2)所述中央处理器装置用于根据机车或车辆的实时位置数据解算出机车或车辆的位置,并根据机车或车辆的运行状态数据解算出运行状态;
12、(3)所述数据采集装置收集机车或车辆的运行数据,并将数据发送给中央处理器装置;
13、(4)通过北斗卫星短报文通信装置及5g-r通信装置,将(2)和(3)获取的机车或车辆位置数据和状态信息打包发送给铁路地面列车综合调度指挥系统;
14、(5)所述铁路地面列车综合调度指挥系统根据北斗卫星短报文通信装置解算或5g-r通信装置信号解析获取铁路机车和车辆的实时位置和运行状态等信息;
15、(6)所述铁路地面列车综合调度指挥系统可以实时查看全国铁路机车和车辆的实时位置和运行状态信息。
16、进一步的,所述无人机辅助列车空地通信装置进行通信的步骤包括:
17、s1:建立有通信障碍的用户和无人机通信的三维场景;
18、s2:建立无人机与多终端的通信模型,确定优化函数;
19、s3:建立ddqn算法模型,确定模型中的变量;
20、s4:根据算法仿真对比,优化目标函数。
21、进一步的,s1中,通过无人机和列车间的坐标,确定两者之间的通信距离,并计算两者之间的仰角;
22、设定无人机飞行区域范围d×d×d,定义无人机在时刻t时的位置为q(t)=(xt,yt,zt),t∈[0,t],xt∈[0,d],yt∈[0,d],zt∈[0,d],式中,xt、yt和zt表示无人机在时刻t时位置的x坐标,y坐标和z坐标,t表示无人机从起点位置至终点位置所用的飞行总时间;
23、定义列车k在时刻t时的位置为q(k)=(xk,yk,0);
24、计算无人机与列车之间距离和仰角的方法:
25、通过无人机和列车间的坐标,计算两者之间的通信距离dk为:
26、
27、通过无人机和列车间的坐标,计算两者之间的仰角θ为:
28、
29、进一步的,s2中,具体包括建立无人机和列车间的路径损耗模型,其建立过程为:
30、视距通信的概率通过sigmod函数拟合表示为:
31、
32、式中,a和b是环境变量参数,只与传播的环境有关;
33、非视距通信的概率可表示为:
34、qnlos=1-qlos
35、由于环境及环境中障碍物的影响,信号在通信传输中受到自由空间传播损耗和阴影衰落的共同影响,由此可以分别得到以分贝为单位的los链路和nlos链路的损耗如下:
36、
37、其中,c是光速,fc是载波频率,μlos是视距条件下的额外损耗,μnlos是非视距条件下的额外损耗,总的路径损耗可表示为:
38、q=qlos×nlos+qnlos×nnlos。
39、进一步的,建立无人机与列车空地通信模型步骤为:
40、无人机与列车间信道增益可表示为:
41、
42、ρ0代表以1m为单位参考距离时的信道功率增益;
43、无人机与列车间的信干噪比为:
44、
45、式中,s(t)表示无人机基站的发射功率,0<s(t)<smax;σ2是用户处的高斯白噪声功率,l(t)是时隙t时的信道干扰;
46、一台无人机与列车通信过程中吞吐量可表示为:
47、rk(t)=bk(t)log2(1+hk(t))
48、其中,bk为信道的带宽;
49、因此,对于多辆列车k,在单位时间内无人机总信道吞吐量可表示为:
50、
51、因此,对于多辆列车k,在服务时间t内无人机总信道吞吐量可表示为:
52、
53、进一步的,s3中,定义ddqn算法网络中的状态state,动作action和奖励函数,采用双q网络解决dqn算法的过估计问题;
54、定义状态state的函数表达式为:
55、state={δx,δy,δz,w,v}
56、其中,δx,δy,δz为无人机与列车间的相对坐标,w为无人机所携带的基站的通信范围,v为无人机相对于地面的飞行速度;
57、定义动作action的函数表达式:
58、action={…,τ-ω,τ,τ+ω,…}
59、其中,τ为无人机在单位时间间隔内位置变化的动作,ω为最小单位的变化动作;在服务时间t内,无人机轨迹位置相较于上一时间变化值为τ+ω;
60、奖励值的设置会根据在服务时间t内各个状态state的通信吞吐量来评估,奖励函数可表示为:
61、r(st,at,st+1)=αrk(t)+βr(st-1,at,st)+δ
62、其中,α和δ表示常系数,β表示权重因子。
63、进一步的,s4中,通过ddqn算法的过程如下:
64、(1)初始化用户和无人机的位置坐标,初始化参数包括:通信距离dk,仰角θ,视距通信损耗nlos,非视距通信损耗nnlos,光速c,载波频率fc,视距条件下的额外损耗μlos,非视距条件下的额外损耗μnlos,信道增益g(t),信干燥比hk(t),无人机基站的发射功率s(t),用户处的高斯白噪声功率σ2,信道干扰l(t),单位参考距离时的信道功率增益ρ0;
65、(2)将动作、状态和奖励函数输入到目标网络的参数中;
66、(3)初始化行为过程n来添加噪声,初始化状态s1,根据当前策略和噪声,获得行为at;
67、(4)执行行为at,获得回报r和下一状态st+1,并将状态序列(st,at,st+1)存储在缓冲池中;
68、(5)下一次迭代重复上述过程,并更新参数。
69、与现有技术相比,本发明的有益效果在于:
70、1、本发明示例的基于北斗短报文、无人机的列车实时定位系统及方法,装配有北斗卫星短报文通信装置及5g-r通信装置,在移动通信信号不可用的情况下(如山区、峡谷、隧道、雪山、海外地区),依然可以通过北斗短报文通信信号进行通信,向中央列车综合调度指挥系统发送列车实时位置和运行状态信息,此方式具有高可靠性、高精度和高数据安全性的特点;现阶段中国铁路5g移动通信网尚未完全覆盖国家铁路线路网络,如果5g-r信号完全覆盖国内铁路线路网络,该系统可单独使用铁路5g-r通信方式发送列车实时位置和运行状态数据,此方式能够提升通信链路的实时性同时降低使用成本,另外,通过卫星短报文和专用5g-r网络,保证了信息传输的隐私性和数据安全,保证数据的安全可靠;
71、2、本发明示例的基于北斗短报文、无人机的列车实时定位系统及方法,能够解决货车车辆在铁路站场轨道上停留时间的问题,同时能解决在铁路站场内一条铁路线能同时停留多少辆货车车辆的问题,现阶段铁路站场内由于铁路货车车辆上没有电子设备,车辆车号识别系统只能在车辆通过某个固定点的时候获取车辆位置,而无法获取车辆在车站内的具体位置;因此,首先工作人员无法实时查询到货车车辆在车站内具体哪条股道,从而无法获取车辆在股道上实际停留了多长时间,无法获取货车停留时,极大地降低货运运输效率;其次由于无法获取货车车辆在车站内具体股道的具体位置,从而无法获取这条股道上剩余的线路长度,工作人员无法得知这条股道上还能停几辆车,而本系统解决了车辆到发时和停留股道的问题,可对列车进行实时监控和数据分析,可以预测并及时处理可能出现的故障,减少不必要的维修和停机时间;
72、3、本发明示例的基于北斗短报文、无人机的列车实时定位系统及方法,采用双q网络解决dqn算法的过估计问题,采用神经网络替代q-learning算法中的q表,解决了大规模连续状态空间中q表占用空间大、计算复杂度高的问题。
本文地址:https://www.jishuxx.com/zhuanli/20241015/314595.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表