一种用于固定弧焊枪的清枪设备以及固定弧焊工作站
- 国知局
- 2024-10-15 09:39:25
本发明涉及焊接,具体而言,涉及一种用于固定弧焊枪的清枪设备以及固定弧焊工作站。
背景技术:
1、弧焊机器人系统主要由机械手总成、控制系统、示教系统、焊机、送丝机构、焊枪等组成,点焊机器机器人系统有电焊机器人、机器人焊枪、点焊控制器及电极修磨系统组成,而机器人弧焊和点焊作为非常成熟的一种焊接工艺广泛应用在自动化加工的各行各业。由于在一些生产场景中需要机器人抓取工件去进行焊接,一种固定焊的机器人工作方法有别于常规机器人带枪的方法。这时候电流的回路、试焊机构、焊枪清枪站就需要有别于机器人带焊枪去焊接时的解决方案。
2、秦兴等在专利201822258684.1中提出一种机器人用螺柱焊接抓手,对机器人螺柱焊的接地导电机构提及,但是该专利对机器人弧焊的电流回路和试焊机构没有提及。
3、王强提出一种弧焊机器人清枪站(cn211490048u),无需对枪管进行多次换位,提高使用可靠性,本体上设置有固定装置、剪丝装置、清理装置、喷油装置和旋转装置,剪丝装置位于固定装置的下方,清理装置和喷油装置均安装于旋转装置上,并且清理装置和喷油装置左右对称设置在旋转装置上。该专利是作为一种固定的清枪站的详细结构,需要机器人带动焊枪来进行清枪,并不能解决固定焊枪的清枪问题。
4、综上所述,现有技术中缺少能够针对固定焊枪的清枪剪丝设备,以及配合固定焊枪使用的工作站台。
技术实现思路
1、本发明的目的在于提供一种用于固定弧焊枪的清枪设备,其结构新颖,操作简单,可以针对固定弧焊枪,完成快速精准的清洗和剪丝作业。
2、本发明的另一目的在于提供一种固定弧焊工作站,其针对固定弧焊枪设置了完整的电流回路规划、配套的清枪设备、输送设备等,可以实现全自动的工作流程。
3、本发明的实施例是这样实现的:
4、一种用于固定弧焊枪的清枪设备,其包括:
5、支架,支架包括位于其顶部的滑动组件,以及用于驱动滑动组件沿支架的长度方向滑动的第一驱动装置;
6、清枪组件,清枪组件包括安装架,安装架靠近支架的一端的底部与支架铰接,顶部通过连杆与滑动组件连接,连杆的两端分别与安装架和滑动组件铰接;安装架的顶部设置有滑动连接的支撑台,以及用以驱动支撑台沿安装架高度方向滑动的第二驱动装置;支撑台的顶部设置有滑动连接的滑动板,以及用以驱动滑动板沿安装架的长度方向滑动的第三驱动装置;滑动板的顶部层叠设置有清洗装置和剪丝装置。
7、进一步地,在本发明其它较佳实施例中,第一驱动装置包括第一气缸,第一气缸的缸筒与支架的中部铰接,第一气缸的活塞杆与滑动组件铰接;滑动组件设置有用于对焊丝进行检测的焊丝检测装置。
8、进一步地,在本发明其它较佳实施例中,第二驱动装置包括沿安装架的高度方向设置的第二气缸,第二气缸的缸筒与安装架固定连接,第二气缸的活塞杆与支撑台固定连接。
9、进一步地,在本发明其它较佳实施例中,安装架具有沿其高度方向设置的第一滑槽,支撑台的底部设置有第一滑块,第一滑块与第二气缸的活塞杆连接,并滑动嵌设于第一滑槽内;第一滑槽在靠近支撑台的一端设置有第一限位块,在远离支撑台的一端设置有第二限位块;第一限位块和第二限位块用以限制支撑台的滑动范围。
10、进一步地,在本发明其它较佳实施例中,第三驱动装置包括沿支撑台的长度方向设置的第三气缸,第三气缸的缸筒与支撑台固定连接,第三气缸的活塞杆与滑动板固定连接。
11、进一步地,在本发明其它较佳实施例中,支撑台具有沿其长度方向设置的第二滑槽,滑动板在靠近第三气缸的一端设置有第二滑块,第二滑块与第三气缸的活塞杆连接,并滑动嵌设于第二滑槽内;第二滑槽在靠近滑动板的一端设置有第三限位块;第三限位块用以限制滑动板的滑动范围。
12、进一步地,在本发明其它较佳实施例中,清枪设备还包括校准装置,校准装置与滑动板可拆卸连接。清枪设备还包括校准装置,校准装置与滑动板可拆卸连接;校准装置包括定位框体,定位框体的一组对角设置有定位插销,滑动板上有与定位插销所匹配的销孔;定位框体的另一组对角设置有拧紧螺丝;在定位框体上设置有定位件和定位检测机构,定位件和定位检测机构位于定位框体的同一侧,在进行校准时,定位件与弧焊枪的枪体抵接,此时若定位检测机构对准弧焊枪的枪口则判定为弧焊枪位置正确
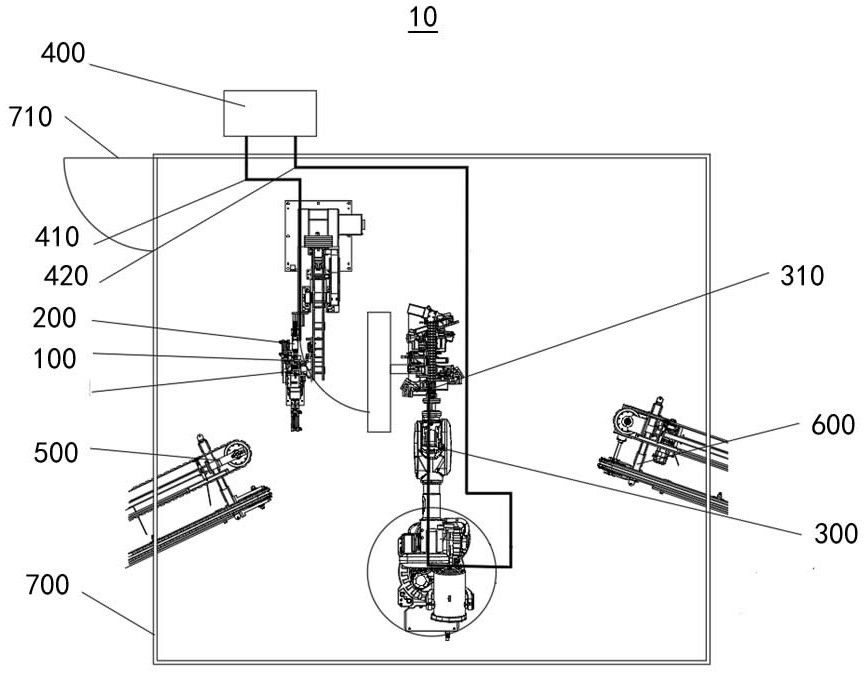
13、进一步地,本发明实施例还提供了一种固定弧焊工作站,其包括弧焊枪、抓手机器人,以及上述用于固定弧焊枪的清枪设备;弧焊枪固定在支架的顶部,朝向清枪组件;弧焊枪具有与正极电缆连接的正极接头,抓手机器人设置有用以与负极电缆连接的负极接头。
14、进一步地,在本发明其它较佳实施例中,抓手机器人设置有试焊台,试焊台包括安装支架,安装支架设置有用于对试焊件进行加持的夹头机构,夹头机构包括第三滑槽,以及滑动嵌设于第三滑槽内的一对压头,一对压头在弹性件的驱动下向彼此靠拢。
15、进一步地,在本发明其它较佳实施例中,固定弧焊工作站设置有工作站围栏,弧焊枪、抓手机器人,以及清枪设备均设置于工作站围栏所围成的区域内;固定弧焊工作站还设置有用于将工件输送至工作站围栏内导入输送机构,以及用于将工件输送出工作站围栏外的导出输送机构。
16、本发明实施例的有益效果是:
17、本发明实施例提供了一种用于固定弧焊枪的清枪设备,包括支架和清枪组件,清枪组件上设置有清洗装置和剪丝装置。在第一驱动装置、第二驱动装置和第三驱动装置的共同操作下,可以对固定弧焊枪进行清洗状态和剪丝状态的切换,快速高效地完成对弧焊枪的清洗和剪丝。此外,本发明还提供了一种固定弧焊工作站,其包括弧焊枪、抓手机器人,以及上述用于固定弧焊枪的清枪设备,其针对固定弧焊枪设置了完整的电流回路规划、配套的清枪设备、输送设备等,可以实现全自动的工作流程,完成对工件的高效焊接。
技术特征:1.一种用于固定弧焊枪的清枪设备,其特征在于,包括:
2.根据权利要求1所述的用于固定弧焊枪的清枪设备,其特征在于,所述第一驱动装置包括第一气缸,所述第一气缸的缸筒与所述支架的中部铰接,所述第一气缸的活塞杆与所述滑动组件铰接;所述滑动组件设置有用于对焊丝进行检测的焊丝检测装置。
3.根据权利要求2所述的用于固定弧焊枪的清枪设备,其特征在于,所述第二驱动装置包括沿所述安装架的高度方向设置的第二气缸,所述第二气缸的缸筒与所述安装架固定连接,所述第二气缸的活塞杆与所述支撑台固定连接。
4.根据权利要求3所述的用于固定弧焊枪的清枪设备,其特征在于,所述安装架具有沿其高度方向设置的第一滑槽,所述支撑台的底部设置有第一滑块,所述第一滑块与所述第二气缸的活塞杆连接,并滑动嵌设于所述第一滑槽内;所述第一滑槽在靠近所述支撑台的一端设置有第一限位块,在远离所述支撑台的一端设置有第二限位块;所述第一限位块和所述第二限位块用以限制所述支撑台的滑动范围。
5.根据权利要求4所述的用于固定弧焊枪的清枪设备,其特征在于,所述第三驱动装置包括沿所述支撑台的长度方向设置的第三气缸,所述第三气缸的缸筒与所述支撑台固定连接,所述第三气缸的活塞杆与所述滑动板固定连接。
6.根据权利要求5所述的用于固定弧焊枪的清枪设备,其特征在于,所述支撑台具有沿其长度方向设置的第二滑槽,所述滑动板在靠近所述第三气缸的一端设置有第二滑块,所述第二滑块与所述第三气缸的活塞杆连接,并滑动嵌设于所述第二滑槽内;所述第二滑槽在靠近所述滑动板的一端设置有第三限位块,所述第三限位块用以限制所述滑动板的滑动范围。
7.根据权利要求6所述的用于固定弧焊枪的清枪设备,其特征在于,所述清枪设备还包括校准装置,所述校准装置与所述滑动板可拆卸连接;所述校准装置包括定位框体,所述定位框体的一组对角设置有定位插销,所述滑动板上有与所述定位插销所匹配的销孔;所述定位框体的另一组对角设置有拧紧螺丝;在定位框体上设置有定位件和定位检测机构,所述定位件和所述定位检测机构位于所述定位框体的同一侧,在进行校准时,所述定位件与弧焊枪的枪体抵接,此时若所述定位检测机构对准弧焊枪的枪口则判定为弧焊枪位置正确。
8.一种固定弧焊工作站,其特征在于,包括弧焊枪、抓手机器人,以及如权利要求1~7任一项所述的用于固定弧焊枪的清枪设备;所述弧焊枪固定在所述支架的顶部,朝向所述清枪组件;所述弧焊枪具有与正极电缆连接的正极接头,所述抓手机器人设置有用以与负极电缆连接的负极接头。
9.根据权利要求8所述的固定弧焊工作站,其特征在于,所述抓手机器人设置有试焊台,所述试焊台包括安装支架,所述安装支架设置有用于对试焊件进行加持的夹头机构,所述夹头机构包括第三滑槽,以及滑动嵌设于所述第三滑槽内的一对压头,一对所述压头在弹性件的驱动下向彼此靠拢。
10.根据权利要求9所述的固定弧焊工作站,其特征在于,所述固定弧焊工作站设置有工作站围栏,所述弧焊枪、所述抓手机器人,以及所述清枪设备均设置于所述工作站围栏所围成的区域内;所述固定弧焊工作站还设置有用于将工件输送至所述工作站围栏内导入输送机构,以及用于将工件输送出所述工作站围栏外的导出输送机构。
技术总结一种用于固定弧焊枪的清枪设备,涉及焊接技术领域,包括支架和清枪组件,清枪组件上设置有清洗装置和剪丝装置。在第一驱动装置、第二驱动装置和第三驱动装置的共同操作下,可以对固定弧焊枪进行清洗状态和剪丝状态的切换,快速高效地完成对弧焊枪的清洗和剪丝。此外,本发明还提供了一种固定弧焊工作站,其包括弧焊枪、抓手机器人,以及上述用于固定弧焊枪的清枪设备,其针对固定弧焊枪设置了完整的电流回路规划、配套的清枪设备、输送设备等,可以实现全自动的工作流程,完成对工件的高效焊接。技术研发人员:张瑞海受保护的技术使用者:成都航空职业技术学院技术研发日:技术公布日:2024/10/10本文地址:https://www.jishuxx.com/zhuanli/20241015/314888.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。