一种车辆转向传动比的计算方法与流程
- 国知局
- 2024-10-21 14:29:20
本发明涉及车辆相关参数的计算方法,具体涉及一种车辆转向传动比的计算方法。
背景技术:
1、车辆的转向传动比参数在与整车相关的开发、仿真、测试等领域应用非常广泛,是一个非常重要的参数。转向传动比是方向盘转角与对应的前轮转角的比值,是一个非线性值,主要与转向器有关,此外还受整车结构的影响。主机厂可能会将转向器供应商提供的多种转向器适配到不同的车型上,导致每款车型的转向传动比不同。
2、公开号为cn115593422a的中国发明专利公开了《一种计算车速的方法及装置》,其获取转向轮和方向盘转角之间的转向传动比函数包括:①通过测量精度高于轮速计的定位设备获取真值车速;②通过方向盘转角和所述真值车速确定转向轮的转角;③将预设时间段内的方向盘转角和所述驱转向轮的转角的映射数据进行拟合得到转向传动比函数。但该方案的实施成本很高,包括且不限于部门协调成本、人力成本、设备成本以及时间成本等。因此现亟需一种成本较低且能够快速获取车辆转向传动比的方案。
技术实现思路
1、本发明目的是提供一种车辆转向传动比的计算方法,以解决现有车辆转向传动比的获取方法成本高且效率低的技术问题。
2、为了达到上述目的,本发明采用如下技术方案:
3、一种车辆转向传动比的计算方法,其特殊之处在于,包括以下步骤:
4、步骤1、采集数据;
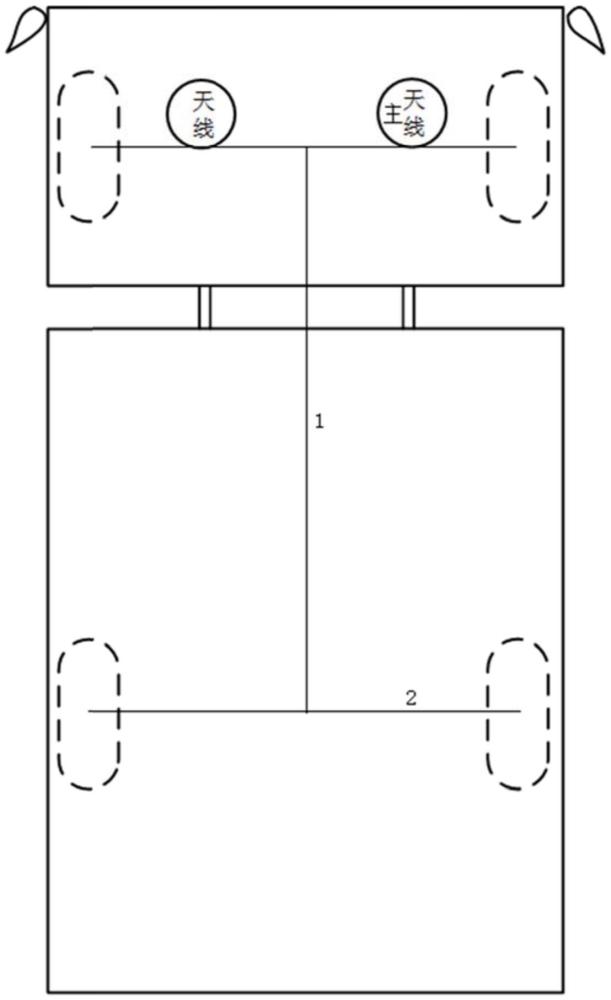
5、1.1、向车辆安装惯性导航设备,并将所述惯性导航设备的天线布置在车顶,其中的主天线设置于车顶的右前方;
6、1.2、在无天线信号干扰的平地上,启动车辆惯性导航设备,固定方向盘转角β,驾驶车辆前行,旋转至少一周,采集主天线的实时位置信息;
7、步骤2、转向传动比的计算;
8、2.1、将采集到的实时位置信息拟合为圆,获取其半径r′,r′即为主天线处的转弯半径;
9、2.2、获取主天线到车辆后轴的轴向距离d1和主天线至车轴的距离d2,计算得到车辆在方向盘转角为β时的转向传动比k:
10、
11、其中,l为车辆的轴距。
12、进一步地,步骤2.2具体为:
13、2.21获取主天线到车辆后轴的轴向距离d1和主天线至车轴的距离d2;
14、2.22计算后轴中心处的转弯半径r:
15、
16、2.23计算得到车辆在方向盘转角为β时的转向传动比k:
17、
18、进一步地,步骤2.1具体为:
19、利用最小二乘法将采集的实时位置信息拟合为圆,获取其半径r′,r′即为主天线处的转弯半径。
20、进一步地,还包括步骤3:
21、返回步骤1.2,并改变方向盘转角β的大小,获取车辆在不同方向盘转角β时的多个转向传动比k。
22、本发明的有益效果:
23、本发明通过借助惯性导航设备快速获取车辆转向传动比,该方法基于实时数据信息计算车辆转向传动比,其结果获取快速且准确,而且获取方法仅需一人一车一空地即可完成,极大地降低了成本,提高了车辆转向传动比的计算效率。
技术特征:1.一种车辆转向传动比的计算方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的车辆转向传动比的计算方法,其特征在于,步骤2.2具体为:
3.根据权利要求1或2所述的车辆转向传动比的计算方法,其特征在于,步骤2.1具体为:
4.根据权利要求3所述的车辆转向传动比的计算方法,其特征在于,还包括步骤3:
技术总结本发明公开了一种车辆转向传动比的计算方法,解决了现有车辆转向传动比的获取方法成本高且效率低的问题,具体包括步骤1、采集数据;1.1、向车辆安装惯性导航设备,并将惯性导航设备的天线布置在车顶,其中的主天线设置于车顶的右前方;1.2、在无天线信号干扰的平地上,启动车辆惯性导航设备,固定方向盘转角β,驾驶车辆前行,旋转至少一周,采集主天线的实时位置信息;步骤2、转向传动比的计算;2.1、将采集到的实时位置信息拟合为圆,获取其半径R′,R′即为主天线处的转弯半径;2.2、获取主天线到车辆后轴的轴向距离d<subgt;1</subgt;和主天线至车轴的距离d<subgt;2</subgt;,计算得到车辆在方向盘转角为β时的转向传动比k。技术研发人员:王耀,刘义,徐马长啸,郝海洋,何亚楠,席永强受保护的技术使用者:陕西法士特汽车传动集团有限责任公司技术研发日:技术公布日:2024/10/17本文地址:https://www.jishuxx.com/zhuanli/20241021/318329.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表