一种模块化舵轮底盘的结构与控制方法
- 国知局
- 2024-10-21 14:46:07
本发明涉及舵轮底盘,尤其是提供了一种模块化舵轮底盘的结构与控制方法。
背景技术:
1、移动机器人作为智能制造的典型装备,应用愈发广泛,其便利性在各行业中取得成功应用,移动机器人在运动过程中,需要灵活的底盘实现各种运动形式,四舵轮底盘是通过控制四个舵轮的转角及速度可以实现任意方向运动,成为近几年重载全向移动机器人领域的研究热点。
2、四舵轮底盘结构可以同时满足狭窄工作空间的灵活性要求和复杂地面条件的适应性要求,但其常见舵轮底盘结构零部件连接关系复杂,具有生产制造难度大、行进过程不稳定、需要触地式码盘提供位移数据、需零点复位、运动噪声大、控制方式不灵活,控制精准度差等问题,影响实际应用。
技术实现思路
1、基于此,本发明提供了一种模块化舵轮底盘的结构与控制方法,以简化结构,降低生产制造难度,结合高精度直驱电机且增加减震与力矩传感器,降低了运行噪声和装配难度,提高了运动稳定性及控制精准度。结合三种控制算法,在不同控制需要情况下可灵活控制。通过热锚点测位移模块运算后可实现无触底获取机器人位移数据。实现运动反馈。
2、为了达到上述目的,第一方面,本发明提供了一种模块化舵轮底盘的结构,包括布置在底盘的四个模块化舵轮,所述模块化舵轮包括动力单元和走线单元;所述动力单元包括舵电机及轮电机,所述舵电机的固定体与底盘相连、旋转体与舵轮架相连,被配置为调节舵轮行进方向;所述轮电机固定体与舵轮架相连、旋转体与轮毂相连,被配置为驱动舵轮转动行进;所述走线单元包括上层走线组件、导电滑环及下层走线组件,所述上层走线组件与舵电机相连,包括固定舵电机电源线和信号线;所述导电滑环通过导电滑环固定架与舵电机旋转体相连;所述下层走线组件与轮电机相连,包括轮电机电源线和信号线。
3、进一步的,所述模块化舵轮包括减震检测单元,所述减震检测单元设置有减震组件、全向力矩传感器及信号灯。所述减震组件设置在舵电机的旋转体与轮架之间,并与舵电机旋转体及全向力矩传感器相连,等高螺栓光滑部分从下到上穿过轮电机支架的光滑柱孔、力矩传感器柱孔及减震软垫柱孔,三个柱孔的总厚度与等高螺栓的光滑柱一样高,等高螺栓与舵电机旋转体固定相连,初始状态下等高螺栓面与轮电机圆柱体下面重合,受压后突出轮电机圆柱体下面,以实现减震功能。所述全向力矩传感器设置在减震组件与轮架之间,被配置为检测舵轮受力情况,所述信号灯嵌入安装在轮架内。
4、为了达到上述目的,第二方面,本发明提供了模块化舵轮底盘的控制方法,各控制方法有不同的使用场景,基于路径规划控制模式、用户目视手动控制模式和用户目视手动无头模式及差速控制模式。手动无头模式,用户可以不必将自己目视方向和机器人底盘前进方向保持一致。上述各种控制模式,结合热锚点相机采集处理数据返回的位移数据,能够实现精准运动控制。
5、本发明所提供的模块化舵轮底盘的结构与控制方法的技术优势至少体现在以下几个方面:
6、1.所提供的模块化舵轮底盘包括布置在底盘的四个模块化舵轮,模块化舵轮的动力单元包括舵电机及轮电机,舵电机调节舵轮行进方向,轮电机驱动舵轮转动行进;走线单元的上层走线组件与舵电机旋转体相连,下层走线组件与轮电机相连,导电滑环连接在上层走线组件与下层走线组件连接,采用模块化结构,便于生产制造和后期维护。
7、2.所提供的模块化舵轮底盘可以选择基于路径规划控制模式、手动控制模式及差速控制模式的行走控制,并能够实现精准定位控制,便于降低生产制造难度,提高行进过程稳定性及定位精准度。可以实现全向旋转移动及记录自身位移功能,具有控制精度高响应快、无需初始化零点、无轮系结构体积小且运行噪音小,磨损小使用寿命长、带有减震等特点;
8、3.底盘控制模式上有手动控制和路径规划控制模式,手动控制模式解决了差速轮系轮胎易磨损机械结构易损坏问题,路径规划控制模式可以避免规划后因路径和车头朝向要求导致常见底盘模型不能实现预期运动效果的问题。
9、4.在测量位移时候,使用热成像拍摄热锚点后解算图像差反推位移值,可以实现隐蔽精准测量位移。热锚点发采集的底盘位移数据用来实现闭环反馈,进而实现精准控制。
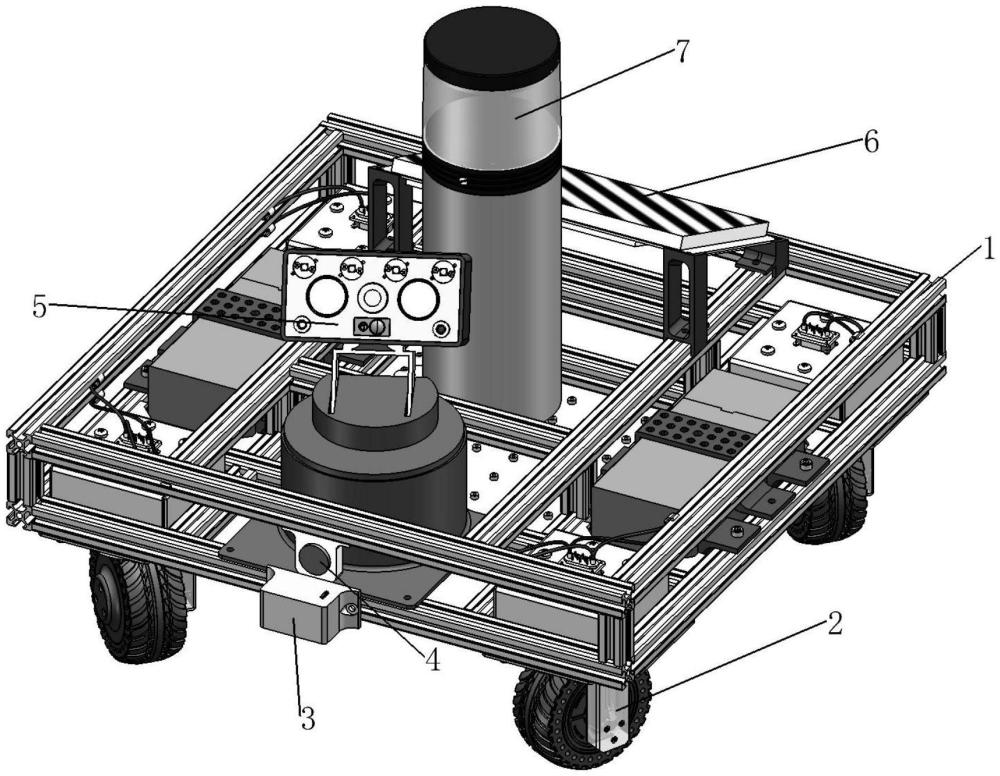
技术特征:1.一种模块化舵轮底盘的结构,包括布置在底盘(1)的四个模块化舵轮(2),热锚点位移传感器(3),接近传感器(4),三目视觉融合采集相机(5),人机交互与机器人控制器(6),激光雷达(7)。其中底盘和四个模块化舵轮其特征在于:
2.根据权利要求1所述的模块化舵轮底盘的结构,其特征在于:所述模块化舵轮(2)还包括减震检测单元,所述减震检测单元设置有减震组件(25)、全向力矩传感器(26)及信号灯,所述减震组件(25)设置在舵电机(21)的旋转体与轮架(23)之间;所述全向力矩传感器(26)设置在减震组件(25)与轮架(23)之间,被配置为检测舵轮受力情况;所述信号灯嵌入安装在轮架(23)内,信号灯由八枚可自由控制颜色的led组成,被配置为指示舵轮运动状态或底盘功能指示。
3.根据权利要求1所述的模块化舵轮底盘的结构,其特征在于:所述减震组件(25)与舵电机(21)旋转体及全向力矩传感器(26)相连,等高螺栓(29)光滑部分从下到上穿过轮电机(22)支架的光滑柱孔、力矩传感器柱孔及减震软垫柱孔,三个柱孔的总厚度与等高螺栓(29)的光滑柱一样高,等高螺栓(29)与舵电机(21)旋转体固定相连,初始状态下等高螺栓(29)面与轮电机(22)圆柱体下面重合,受压后突出轮电机(22)圆柱体下面,以实现减震功能,减震行程可以通过设计减震软垫厚度与等高螺栓长度设定,减震硬度值k值可以通过设定减震软垫中圆柱体数量和大小来实现不同硬度。
4.一种模块化舵轮底盘的控制方法,其特征在于,基于路径规划控制模式、手动控制模式和差速控制模式的其中之一对权利要求1至4任一项所述的模块化舵轮(2)底盘(1)行走控制,并能够进行精准定位控制。
5.根据权利要求4所述的模块化舵轮底盘的控制方法,其特征在于,基于路径规划控制模式的控制过程包括:
6.根据权利要求4所述的模块化舵轮底盘的控制方法,其特征在于,基于手动控制模式的控制过程包括:
7.根据权利要求6所述的模块化舵轮底盘的控制方法,其特征在于,在手动控制模式基础上,当用户手持遥控器面向底盘(1)且遥控器方向与车身坐标系正前方重合时,向量hv和车身正方向重合,传感器与遥控器在同一直线上,此时不需要修正车头朝向;
8.根据权利要求4所述的模块化舵轮底盘的控制方法,其特征在于,基于差速控制模式的控制过程包括:
9.根据权利要求4的模块化舵轮底盘行进控制方法,其特征在于,在各种控制模式下,设计了一种最小转角优化方法,可计算出舵电机最小转角,该方法只需要获取当前舵电机朝向和目标朝向,计算主要思想是,根据速度目标方向变化量,经过优化后,传递给舵电机角度,包括步骤:
10.根据权利要求4所述的模块化舵轮底盘的控制方法,作为感知计算移动机器人位移距离,以实现更加精准的运动控制,其特征在于,在三种控制模式执行时,通过热锚点定位法测量移动机器人位移情况实现控制修正,其定位控制过程包括:
技术总结本发明公开了一种模块化舵轮底盘的结构与控制方法,模块化舵轮底盘包括布置在底盘的四个模块化舵轮,模块化舵轮的动力单元包括舵电机及轮电机,舵电机的固定体与底盘相连、旋转体与舵轮架相连,调节舵轮行进方向;轮电机固定体与舵轮架相连、旋转体与轮毂相连,驱动舵轮转动行进;走线单元的上层走线组件与舵电机旋转体相连,包括固定舵电机电源线和信号线;导电滑环通过导电滑环固定架与舵电机旋转体相连;下层走线组件与轮电机相连,包括轮电机电源线和信号线。所提供的模块化舵轮底盘附有热锚点测位移模块,可以被动的测量位移,修正车运行方向,底盘控制可以选择基于路径规划控制模式、手动控制模式及差速控制模式的行走控制,实现复杂多样的控制方式。上述方案可降低生产制造难度,提高行进过程稳定性及定位精准度。技术研发人员:高瑞贞,张海鹏,陈猛,赵子月受保护的技术使用者:河北工程大学技术研发日:技术公布日:2024/10/17本文地址:https://www.jishuxx.com/zhuanli/20241021/319217.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
动力系统及车辆的制作方法
下一篇
返回列表