一种基于参考SOC修正的混合动力车辆能量管理方法及装置
- 国知局
- 2024-11-21 12:25:41
本发明混合动力车辆能量管理,特别是涉及一种基于参考soc修正的混合动力车辆能量管理方法及装置。
背景技术:
1、混合动力汽车的能量管理策略一般可分为基于规则的控制策略、基于优化模型的控制策略以及基于模型预测的控制策略。其中基于优化模型的能量管理控制策略又可分为瞬时和全局两类策略。基于优化模型中的瞬时能量管理策略可实时求解瞬时最优,可在实车运行过程中求解近似全局最优解。
2、基于瞬时优化模型的能量管理策略中最为代表的策略为等效油耗最小策略(ecms),但该策略存在工况适应性较差以及依赖参考soc规划等问题。此外,ecms通过等效因子将电能消耗等效为燃油消耗,其控制效果受等效因子影响较大。
3、公布号为cn117184034a的中国专利公开了采用lstm神经网络基于车速信息对全局参考soc进行了预测,并以此确定车辆等效因子的能量管理方法,但是其存在车辆实时车速都与车速信息无法保证一致,且无法完全追踪全局参考soc的问题。
技术实现思路
1、针对上述现有技术的缺陷,本发明提供了一种基于参考soc修正的混合动力车辆能量管理方法。本发明的另一目的是提供一种基于参考soc修正的混合动力车辆能量管理装置,优化调整获取的车辆等效因子,提升管理实时性。
2、本发明技术方案如下:一种基于参考soc修正的混合动力车辆能量管理方法,包括:
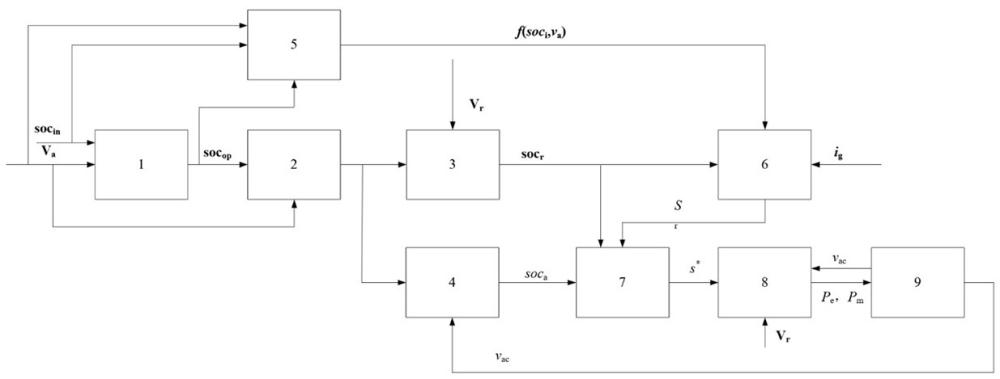
3、获取车辆行进路线上车辆的车速,将车辆行进路线进行分段,确定每个分段上的代表车速工况建立代表性工况集va;
4、基于动态规划算法计算代表性工况集va在不同初始soc值下对应的最优soc序列socop;
5、优化每个分段在不同初始soc值下的等效因子得到最优等效因子,建立最优等效因子与初始soc值以及代表性工况集va中的代表性工况的映射关系;
6、获取车辆当前全行驶里程的车速信息vr 输入至lstm神经网络模型预测全行驶里程参考soc序列 socr;
7、由实时车速 vac输入至lstm神经网络模型预测未来短时域内的最优soc序列 soca;
8、基于全行驶里程参考soc序列 socr以及车辆所处位置由所述映射关系得到各分段的初始等效因子序列 sr并进行修正得到修正等效因子 s*;
9、基于修正等效因子 s* 和实时车速 vac计算使车辆瞬时等效燃油消耗最小的发动机与电机需求功率。
10、进一步地,计算使车辆瞬时等效燃油消耗最小的发动机与电机需求功率时由实时车速 vac与需求车速 v h的差,,通过pi调节获取加速信号 ai,并乘以车辆当前最大输出功率 pmax获取发动机功率 pe与电机功率 pm之和,并由车速模型反馈控制发动机功率和电机功率的实时车速 vac;
11、所述车速模型为,
12、式中,; r为轮胎半径; f r为滚动阻力; f c为空气阻力; f g为爬坡阻力; f a为加速阻力; m为被控车辆整备质量; g为重力加速度; f为滚动阻力系数; c d为被控车辆空气阻力系数; ρ为空气密度; a为被控车辆迎风面积; vac为车辆实时车速; θ为道路坡度; δ为被控车辆旋转质量换算系数。
13、进一步地,计算使车辆瞬时等效燃油消耗最小的发动机与电机需求功率的公式为
14、,
15、式中, pe为发动机功率, pm为电机功率, ηe为发动机效率, ηm为电机效率, ηb为电池效率, h f为燃油热值。
16、进一步地,所述优化每个分段在不同初始soc值下的等效因子时的优化目标为
17、,
18、为初始soc值,s为等效因子。
19、进一步地,对各分段的初始等效因子序列 sr并进行修正得到修正等效因子 s*的修正公式为
20、, n为预测时域长度; socmax与 socmin分别为soc上下限;。
21、本发明还提供一种基于参考soc修正的混合动力车辆能量管理装置,包括:
22、初始化模块,用于获取车辆行进路线上车辆的车速,将车辆行进路线进行分段,确定每个分段上的代表车速工况建立代表性工况集va;
23、最优求解模块,用于基于动态规划算法计算代表性工况集va在不同初始soc值下对应的最优soc序列socop;
24、等效因子优化模块,用于优化每个分段在不同初始soc值下的等效因子得到最优等效因子,建立最优等效因子与初始soc值以及代表性工况集va中的代表性工况的映射关系;
25、全局soc预测模块,用于获取车辆当前全行驶里程的车速信息vr 输入至lstm神经网络模型预测全行驶里程参考soc序列 socr;
26、短程soc预测模块,用于由实时车速 vac输入至lstm神经网络模型预测未来短时域内的最优soc序列 soca;
27、soc修正模块,用于基于全行驶里程参考soc序列 socr以及车辆所处位置由所述映射关系得到各分段的初始等效因子序列 sr并进行修正得到修正等效因子 s*;
28、以及整车控制模块,用于基于修正等效因子 s* 和实时车速 vac计算使车辆瞬时等效燃油消耗最小的发动机与电机需求功率。
29、进一步地,包括车速模型模块,所述整车控制模块计算使车辆瞬时等效燃油消耗最小的发动机与电机需求功率时由实时车速 vac与需求车速 v h的差,,通过pi调节获取加速信号 ai,并乘以车辆当前最大输出功率 pmax获取发动机功率 pe与电机功率 pm之和,所述车速模型模块用于由车速模型反馈控制发动机功率和电机功率的实时车速 vac;
30、所述车速模型为,
31、式中,; r为轮胎半径; f r为滚动阻力; f c为空气阻力; f g为爬坡阻力; f a为加速阻力; m为被控车辆整备质量; g为重力加速度; f为滚动阻力系数; c d为被控车辆空气阻力系数; ρ为空气密度; a为被控车辆迎风面积; vac为车辆实时车速; θ为道路坡度; δ为被控车辆旋转质量换算系数。
32、与现有技术相比,本发明所提供的技术方案的优点在于:
33、本发明通过lstm神经网络对全局参考soc以及短时域内soc进行预测,并依据预测效果对优化获取的等效因子进行调整,可有效对使车辆追踪最优状态序列,具有较高的实时性,可提升车辆的燃油经济性。
本文地址:https://www.jishuxx.com/zhuanli/20241120/335320.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表