一种机器人谐波减速器模态试验装置及试验方法与流程
- 国知局
- 2024-11-25 15:12:09
本发明涉及一种采用锤击激励法测试谐波减速器固有频率、阻尼和振型的试验装置和方法,用以研究机器人谐波减速器的振动特性,属于机器人谐波减速器模态试验。
背景技术:
1、谐波减速器是机器人驱动关节中的关键零部件,其模态参数对工业机器人的动态精度和稳定性等性能具有重要影响,一旦减速器的固有频率与外部激励频率重合,将导致共振,从而严重影响其精度和寿命。模态测试与分析通过评估结构在动态条件下的振动特性来识别结构的固有特性,包括频率、阻尼和振型。其中锤击法模态测试是其中一种简单高效的方法,通过在结构上使用力锤施加短暂的冲击力来激发振动,并通过安装在结构上的加速度传感器或其他传感器记录结构的响应。模态测试与分析技术的应用范围非常广泛,从简单的结构优化到复杂的故障诊断和寿命预测,因此研究谐波减速器的模态试验方法具有重要意义。
2、公开号为cn113484419a的中国专利公开了一种动力电池组自由模态试验装置及其使用方法,使用方法为将动力电池组通过橡皮绳悬挂于试验架下方,采用力锤分别依次敲击动力电池组激励点,得到响应的频率和振型数据,比较后选取有效数据,获得固有频率和振型。然而该方法获得的是动力电池组的模态频率和振型。文献《谐波减速器扭转模态测试技术研究》研究谐波减速器运动自激励技术,基于最小二乘复频域法设计谐波减速器扭转模态辨识方案,最后通过实验实现对模态参数的辨识。然而该方法仅适用于自激励技术,需要搭建测试环境,对锤击法模态测试无法起到指导作用。
技术实现思路
1、本发明的目的是:提供一种机器人谐波减速器的模态试验装置和该模态试验装置的使用方法。
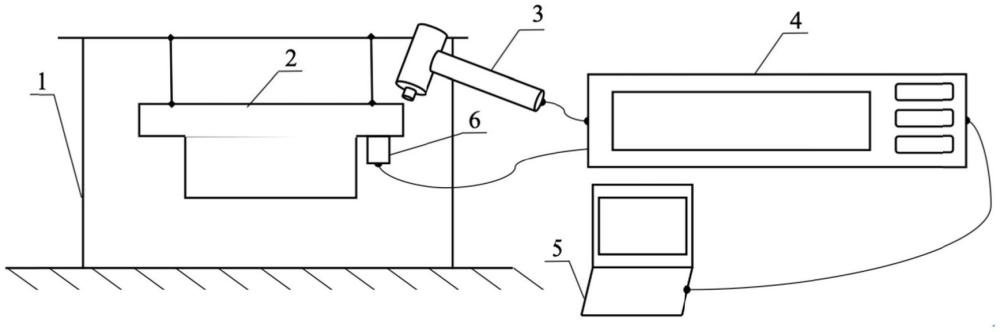
2、为了达到上述目的,本发明的一个方面是公开了一种机器人谐波减速器模态试验装置,其特征在于,包括试验架,机器人谐波减速器样品悬挂在试验架上且处于自由状态;所述机器人谐波减速器样品的测点处设有加速度传感器;所述机器人谐波减速器模态试验装置还包括用于敲击所述机器人谐波减速器样品的激励点的力锤,力锤内设有力传感器;加速度传感器以及力传感器与数据采集卡相连,数据采集卡与计算机系统建立数据通信。
3、优选地,所述机器人谐波减速器样品的两侧分别与一根橡皮绳的一端连接固定,两根橡皮绳的另一端连接固定在所述试验架上。
4、优选地,所述加速度传感器采用胶水固定在所述机器人谐波减速器样品上。
5、优选地,所述力锤的锤头材质为塑料。
6、优选地,所述加速度传感器为三轴加速度传感器。
7、本发明的另一方面是公开了一种机器人谐波减速器模态试验方法,其特征在于,包括以下步骤:
8、步骤1、搭建上述的机器人谐波减速器模态试验装置;
9、步骤2、建立几何模型:
10、步骤201、使用所述计算机系统中的模态测试模块对所述机器人谐波减速器样品进行建模,选择柱坐标方式并设置测点,测点的位置均匀对称,且能表现出所述机器人谐波减速器样品的外形结构;
11、步骤202、设置激励点和响应点的坐标,保证与所述机器人谐波减速器样品实物中的位置对应;
12、步骤3、模态测试参数设置:
13、选择所述力锤敲击激励点,设置所述加速度传感器的量程,选择模态频响函数共振峰较多的点作为激励点,激励点有多个;
14、步骤4、模态测试:
15、开始模态测试,使用所述力锤敲击步骤3选择的激励点,至少敲击三次,所述计算机系统中的模态测试模块对力信号和加速度信号进行频域转换,并计算频响函数;
16、步骤5、模态分析和验证:
17、步骤501、使用所述计算机系统中的模态分析模块,基于polymax模态分析方法进行极点选择和振型计算,其中,振型计算选择所有测点的频响函数;
18、步骤502、使用所述计算机系统中的模态分析模块对提取的模态参数和振型进行验证。
19、优选地,步骤4中,若所述加速度传感器通道较少,采用移动传感器法,分批次对所述机器人谐波减速器样品上的全部测点进行测试。
20、优选地,步骤502中,采用模态置信判据,当模态置信矩阵中非对角线元素值很大时,说明模态参数结果准确度较低,需要进行异常原因排查。
21、本发明通过锤击法模态测试获得机器人谐波减速器的固有频率、阻尼和振型,且操作简单、试验成本低、通用性强。与现有的模态试验技术相比,本发明具体具有如下有益效果:
22、1)通过采用本发明公开的试验装置进行测试,可以较为准确得获取机器人谐波减速器的固有频率、阻尼和振型,并对模态参数进行验证,可以用于减速器的结构优化和寿命预测等。
23、2)采用锤击法进行测试,操作简单,试验系统搭建方便,方便灵活地选择测试场地。
24、3)被测谐波减速器的类型广,对于各种外形、尺寸和重量的减速器都可进行测试。
技术特征:1.一种机器人谐波减速器模态试验装置,其特征在于,包括试验架,机器人谐波减速器样品悬挂在试验架上且处于自由状态;所述机器人谐波减速器样品的测点处设有加速度传感器;所述机器人谐波减速器模态试验装置还包括用于敲击所述机器人谐波减速器样品的激励点的力锤,力锤内设有力传感器;加速度传感器以及力传感器与数据采集卡相连,数据采集卡与计算机系统建立数据通信。
2.如权利要求1所述的一种机器人谐波减速器模态试验装置,其特征在于,所述机器人谐波减速器样品的两侧分别与一根橡皮绳的一端连接固定,两根橡皮绳的另一端连接固定在所述试验架上。
3.如权利要求1所述的一种机器人谐波减速器模态试验装置,其特征在于,所述加速度传感器采用胶水固定在所述机器人谐波减速器样品上。
4.如权利要求1所述的一种机器人谐波减速器模态试验装置,其特征在于,所述力锤的锤头材质为塑料。
5.如权利要求1所述的一种机器人谐波减速器模态试验装置,其特征在于,所述加速度传感器为三轴加速度传感器。
6.一种机器人谐波减速器模态试验方法,其特征在于,包括以下步骤:
7.如权利要求6所述的一种机器人谐波减速器模态试验方法,其特征在于,步骤4中,若所述加速度传感器通道较少,采用移动传感器法,分批次对所述机器人谐波减速器样品上的全部测点进行测试。
8.如权利要求6所述的一种机器人谐波减速器模态试验方法,其特征在于,步骤502中,采用模态置信判据,当模态置信矩阵中非对角线元素值很大时,说明模态参数结果准确度较低,需要进行异常原因排查。
技术总结本发明的一个方面是公开了一种机器人谐波减速器模态试验装置,其特征在于,包括试验架,机器人谐波减速器样品悬挂在试验架上且处于自由状态;所述机器人谐波减速器样品的测点处设有加速度传感器;所述机器人谐波减速器模态试验装置还包括用于敲击所述机器人谐波减速器样品的激励点的力锤,力锤内设有力传感器;加速度传感器以及力传感器与数据采集卡相连,数据采集卡与计算机系统建立数据通信。本发明的另一方面是公开了一种机器人谐波减速器模态试验方法。本发明通过锤击法模态测试获得机器人谐波减速器的固有频率、阻尼和振型,且操作简单、试验成本低、通用性强。技术研发人员:李琼,周吉垣,汪双灿受保护的技术使用者:上海电科院技术有限公司技术研发日:技术公布日:2024/11/21本文地址:https://www.jishuxx.com/zhuanli/20241125/336698.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。