一种三臂开箱机械的制作方法
- 国知局
- 2024-11-25 15:13:49
本发明涉及包装自动化的,尤其涉及一种三臂开箱机械。
背景技术:
1、在现代工业生产中,物流和物料处理是提高生产效率和降低成本的关键环节,越来越多的生产线开始采用机器人和自动化设备来替代传统的人工操作,然而物料的开箱和取料环节一直被忽视,由于操作复杂性和物料多样性,自动化程度一直较低,现阶段成为了制约生产效率提升的重要瓶颈。
2、例如,在工厂的生产线中,来料要拆开箱子拿出物料。目前这类开箱取料都是人工完成的,没有一种能够自动开箱取料。因为箱子本身会移动,取料时又要使箱子固定、吸附吸取物料等多项动作,一般机械手不能完成这类动作。
技术实现思路
1、为了解决上述背景技术中的问题,本发明提供了一种三臂开箱机械,用于自动化生产,且解决了现有技术里来料开箱取货不能自动化的问题。
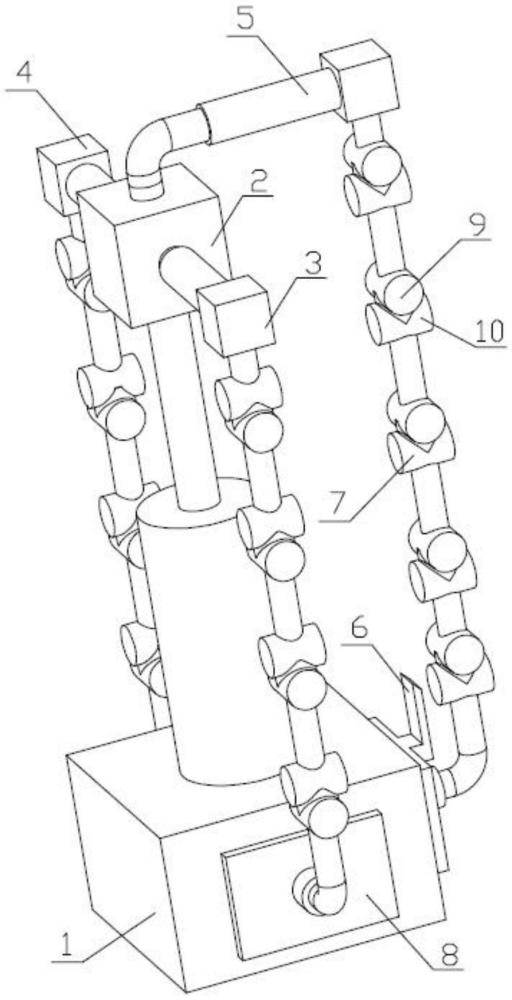
2、本发明解决其技术问题所采取的方案是:一种三臂开箱机械,包括底座、安装座、用于夹紧箱子的左夹臂、用于夹紧箱子的右夹臂、用于划开箱子和从箱子里吸取货物的开箱臂,其中左夹臂、右夹臂、开箱臂安装在安装座上,安装座安装在底座上,左夹臂、右夹臂分别设置在安装座的对侧,开箱臂设置在左夹臂、右夹臂的中间,开箱臂设置有用于划开箱子的刀片,左夹臂、右夹臂、开箱臂均包括可多个角度转动的关节、用于吸附的吸附组件。
3、上述结构中,吸附组件包括与纸箱接触的面板、中间板、底板、气塞,面板、中间板、底板依次放置,中间板与面板、底板连接,中间板设置有用于放置气塞的塞孔,塞孔设置有气孔与中间板、底板之间的空间连通,面板设置有用于吸附的吸附孔,其中塞孔的中心轴线、气孔的中心轴线、吸附孔的中心轴线相同,塞孔的数目、气孔的数目、吸附孔的数目相等,气塞放置在塞孔中以便气塞在吸附孔没有被堵塞住的时候能够堵住气孔来保持中间板、底板之间的空间形成负压。
4、上述结构中,关节包括第一电机、第二电机,其中第一电机与第二电机连接,第一电机的转动中心线与第二电机的转动中心线垂直。
5、上述结构中,气塞设置有用于堵住气孔的塞柱、用于使塞柱与气孔之间保持距离的弹力臂,多个弹力臂之间设置有缝隙以便空气通过,塞柱的长度小于弹力臂的长度。
6、上述结构中,底座、安装座之间还设置有升降机构,升降机构能够使安装座相对于底座做升降运动。
7、上述结构中,升降机构设置为液压油缸,其中液压油缸的缸体与底座连接,液压油缸的活塞与安装座连接。
8、上述结构中,底座的下方还设置有用于移动的滚轮,底座的内部设置有电机、电池,滚轮与电机传动连接,电机与电池电性连接。
9、上述结构中,还包括视觉控制系统,视觉控制系统包括摄像头、控制板,控制板内安装有视觉分析软件以便左夹臂、右夹臂、开箱臂根据摄像头所拍摄的图像来运动。
10、综上所述,本发明的有益效果为:通过设置左夹臂、右夹臂来夹住纸箱,通过设置开箱臂来划开纸箱,打开纸箱,并从纸箱内吸取货物,使开箱取货实现自动化,节省了人工,提高了自动化的程度。
11、上述说明仅是本发明的技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其他目的、特征和优点能够更明显易懂,以下特举较佳实施例,并配合附图,详细说明如下。
技术特征:1.一种三臂开箱机械,其特征在于:包括底座、安装座、用于夹紧箱子的左夹臂、用于夹紧箱子的右夹臂、用于划开箱子和从箱子里吸取货物的开箱臂,其中所述左夹臂、右夹臂、开箱臂安装在安装座上,所述安装座安装在底座上,所述左夹臂、右夹臂分别设置在安装座的对侧,所述开箱臂设置在左夹臂、右夹臂的中间,所述开箱臂设置有用于划开箱子的刀片,所述左夹臂、右夹臂、开箱臂均包括可多个角度转动的关节、用于吸附的吸附组件。
2.根据权利要求1所述的三臂开箱机械,其特征在于:所述吸附组件包括与纸箱接触的面板、中间板、底板、气塞,所述面板、中间板、底板依次放置,所述中间板与面板、底板连接,所述中间板设置有用于放置气塞的塞孔,所述塞孔设置有气孔与中间板、底板之间的空间连通,所述面板设置有用于吸附的吸附孔,其中所述塞孔的中心轴线、气孔的中心轴线、吸附孔的中心轴线相同,所述塞孔的数目、气孔的数目、吸附孔的数目相等,所述气塞放置在塞孔中以便气塞在吸附孔没有被堵塞住的时候能够堵住气孔来保持中间板、底板之间的空间形成负压。
3.根据权利要求1所述的三臂开箱机械,其特征在于:所述关节包括第一电机、第二电机,其中所述第一电机与第二电机连接,所述第一电机的转动中心线与第二电机的转动中心线垂直。
4.根据权利要求2所述的三臂开箱机械,其特征在于:所述气塞设置有用于堵住气孔的塞柱、用于使塞柱与气孔之间保持距离的弹力臂,多个所述弹力臂之间设置有缝隙以便空气通过,所述塞柱的长度小于弹力臂的长度。
5.根据权利要求1所述的三臂开箱机械,其特征在于:所述底座、安装座之间还设置有升降机构,所述升降机构能够使安装座相对于底座做升降运动。
6.根据权利要求5所述的三臂开箱机械,其特征在于:所述升降机构设置为液压油缸,其中所述液压油缸的缸体与底座连接,液压油缸的活塞与安装座连接。
7.根据权利要求1所述的三臂开箱机械,其特征在于:所述底座的下方还设置有用于移动的滚轮,所述底座的内部设置有电机、电池,所述滚轮与电机传动连接,所述电机与电池电性连接。
8.根据权利要求1所述的三臂开箱机械,其特征在于:还包括视觉控制系统,所述视觉控制系统包括摄像头、控制板,所述控制板内安装有视觉分析软件以便左夹臂、右夹臂、开箱臂根据摄像头所拍摄的图像来运动。
技术总结本发明涉及包装自动化的技术领域,尤其涉及一种三臂开箱机械,包括底座、安装座、用于夹紧箱子的左夹臂、用于夹紧箱子的右夹臂、用于划开箱子和从箱子里吸取货物的开箱臂,其中左夹臂、右夹臂、开箱臂安装在安装座上,安装座安装在底座上,左夹臂、右夹臂分别设置在安装座的对侧,开箱臂设置在左夹臂、右夹臂的中间,开箱臂设置有用于划开箱子的刀片,左夹臂、右夹臂、开箱臂均包括可多个角度转动的关节、用于吸附的吸附组件。本发明的有益效果为:通过设置左夹臂、右夹臂来夹住纸箱,通过设置开箱臂来划开纸箱,打开纸箱,并从纸箱内吸取货物,使开箱取货实现自动化,节省了人工,提高了自动化的程度。技术研发人员:晏建斌,罗艳慧受保护的技术使用者:深圳华诚包装科技股份有限公司技术研发日:技术公布日:2024/11/21本文地址:https://www.jishuxx.com/zhuanli/20241125/336850.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表