一种应用于港口AGV的洗车系统及方法与流程
- 国知局
- 2024-12-26 16:47:29
本发明涉及agv清洗的,更具体的说,它涉及一种应用于港口agv的洗车系统及方法。
背景技术:
1、agv(automated guided vehicle),也称自动导向搬运车、自动引导搬运车,在港口当中得到广泛的应用,用于对货物进行短距离搬运,agv在日常使用的过程当中,车身上容易粘附大量的灰尘,为了保证agv车身的洁净,需要定期对agv进行清洗。
2、在目前的港口当中,大多都是通过人工来进行清洗,人工利用高压水枪进行作业,这不仅需要消耗大量的人力成本,还无法保证清洁的效果,并且由于agv车体高,人工清洗难以清洗到agv的顶部;而现有的机械自动化清洗都是通过龙门式洗车方式来进行清洗,只能够做到外观的清洗,对于细节位置的清洗效果差。
技术实现思路
1、针对现有技术存在的不足,本发明的目的在于提供一种应用于港口agv的洗车系统,其通过喷淋系统和机器人系统的设置,能够根据检测系统检测到的信息,精准的对agv的各处进行清洗,既保证了清洗效果,又降低了人力的投入。
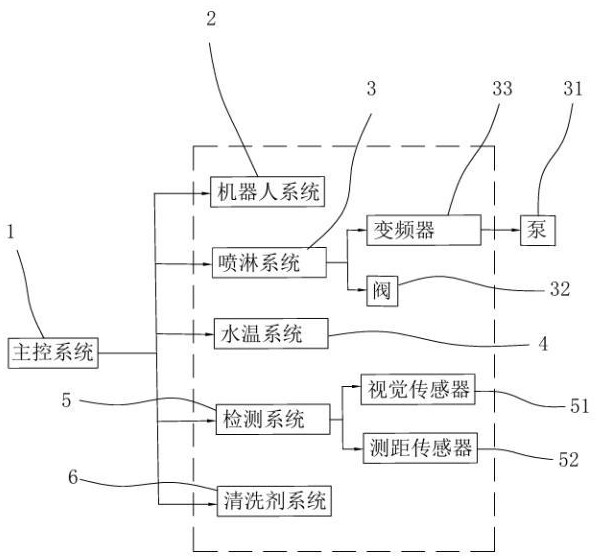
2、为实现上述目的,本发明提供了如下技术方案:一种应用于港口agv的洗车系统,包括检测系统,所述检测系统用于对agv的型号进行识别并且至少对agv四角的位置进行确定;
3、喷淋系统,所述喷淋系统用于向agv车体喷水冲洗;
4、机器人系统,所述机器人系统用于带动喷淋系统对agv车体的各处进行冲洗;
5、以及主控系统,所述主控系统与检测系统、喷淋系统以及机器人系统连接。
6、本发明进一步设置为:还包括清洗剂系统,所述清洗剂系统用于向agv车体喷洒清洗剂,所述清洗剂系统由机器人系统带动对agv车体各处喷洒清洗剂,所述清洗剂系统与主控系统连接。
7、本发明进一步设置为:还包括水温系统,所述水温系统用于控制喷淋系统内水的温度,所述水温系统与主控系统连接。
8、本发明进一步设置为:所述机器人系统包括六轴机器人以及地轨,所述六轴机器人在地轨上沿水平直线滑动。
9、本发明进一步设置为:所述检测系统包括视觉传感器,所述视觉传感器用于获取agv车体的图像信息;
10、以及测距传感器,所述测距传感器设置由多个且至少设置检测与agv四角距离的测距传感器。
11、本发明的另一目的在于提供一种用于港口agv的洗车方法,包括一下步骤:
12、s01、确定清洗任务:agv停靠完成,主控系统根据检测系统检测到的信息确定清洗任务,所述清洗任务至少包括agv型号、清洗区域以及清洗模式;
13、s02、执行清洗任务:喷淋系统和机器人系统接收主控系统的清洗任务并按任务信息执行清洗任务。
14、本发明进一步设置为:所述步骤s01中,清洗模式至少包括清洗剂模式,常温水清洗模式以及加热水清洗模式。
15、本发明进一步设置为:所述步骤s01中,清洗区域至少包括顶部、前部、后部、左部、右部、底部。
16、本发明进一步设置为:所述agv前部区域设置为m00区域,后部区域设置为mn0区域,中部区域由前向后划分为m10、m20…m(n-1)0;中部区域的每一个区域分别包括agv顶部、底部以及两个侧部,m10包括agv顶部的m11,底部的m13,以及两侧部的两个m12。
17、本发明进一步设置为:所述清洗区域还包括液压柜、辅助柜区域m111,电池包区域m112,地面区域m113,扫描仪区域m114。
18、综上所述,本发明相比于现有技术具有以下有益效果:本发明通过喷淋系统和机器人系统的设置,能够根据检测系统检测到的信息,精准的对agv的各处进行清洗,既保证了清洗效果,又降低了人力的投入。
技术特征:1.一种应用于港口agv的洗车系统,其特征在于:包括检测系统(5),所述检测系统(5)用于对agv的型号进行识别并且至少对agv四角的位置进行确定;
2.根据权利要求1所述的一种应用于港口agv的洗车系统,其特征在于:还包括清洗剂系统(6),所述清洗剂系统(6)用于向agv车体喷洒清洗剂,所述清洗剂系统(6)由机器人系统(2)带动对agv车体各处喷洒清洗剂,所述清洗剂系统(6)与主控系统(1)连接。
3.根据权利要求1所述的一种应用于港口agv的洗车系统,其特征在于:还包括水温系统(4),所述水温系统(4)用于控制喷淋系统(3)内水的温度,所述水温系统(4)与主控系统(1)连接。
4.根据权利要求1所述的一种应用于港口agv的洗车系统,其特征在于:所述机器人系统(2)包括六轴机器人以及地轨,所述六轴机器人在地轨上沿水平直线滑动。
5.根据权利要求1所述的一种应用于港口agv的洗车系统,其特征在于:所述检测系统(5)包括视觉传感器(51),所述视觉传感器(51)用于获取agv车体的图像信息;
6.一种应用于港口agv的洗车方法,其特征在于:包括一下步骤:
7.根据权利要求6所述的一种应用于港口agv的洗车方法,其特征在于:所述步骤s01中,清洗模式至少包括清洗剂模式,常温水清洗模式以及加热水清洗模式。
8.根据权利要求6所述的一种应用于港口agv的洗车方法,其特征在于:所述步骤s01中,清洗区域至少包括顶部、前部、后部、左部、右部、底部。
9.根据权利要求8所述的一种应用于港口agv的洗车方法,其特征在于:所述agv前部区域设置为m00区域,后部区域设置为mn0区域,中部区域由前向后划分为m10、m20…m(n-1)0;中部区域的每一个区域分别包括agv顶部、底部以及两个侧部,m10包括agv顶部的m11,底部的m13,以及两侧部的两个m12。
10.根据权利要求9所述的一种应用于港口agv的洗车方法,其特征在于:所述清洗区域还包括液压柜、辅助柜区域m111,电池包区域m112,地面区域m113,扫描仪区域m114。
技术总结本发明公开了一种应用于港口AGV的洗车系统及方法,其技术方案要点是洗车系统包括检测系统,所述检测系统用于对AGV的型号进行识别并且至少对AGV四角的位置进行确定;喷淋系统,所述喷淋系统用于向AGV车体喷水冲洗;机器人系统,所述机器人系统用于带动喷淋系统对AGV车体的各处进行冲洗;以及主控系统,所述主控系统与检测系统、喷淋系统以及机器人系统连接;洗车方法包括:S01、确定清洗任务;S02、执行清洗任务;通过喷淋系统和机器人系统的设置,能够根据检测系统检测到的信息,精准的对AGV的各处进行清洗,既保证了清洗效果,又降低了人力的投入。技术研发人员:刘长勇,刘洪志,许晓川,赵鑫,陈晓龙,李忠鹏受保护的技术使用者:青岛新松机器人自动化有限公司技术研发日:技术公布日:2024/12/12本文地址:https://www.jishuxx.com/zhuanli/20241216/351413.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。