一种具有自适应调节功能的可越障机器人底盘的制作方法
- 国知局
- 2024-12-26 15:29:07
本申请涉及机器人底盘,更具体地说,涉及一种具有自适应调节功能的可越障机器人底盘。
背景技术:
1、机器人(robot)是一种能够半自主或全自主工作的智能机器。机器人能够通过编程和自动控制来执行诸如作业或移动等任务,机器人具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量,而机器人底盘属于机器人整体的一部分。
2、根据检索发现,专利号为cn207087886u的中国专利公开了一种智能机器人,针对上述中的相关技术,申请人认为,包括壳体、机械爪、红外测距仪二、超声波测距仪一、电池、车载驱动电机、红外测距仪一、槽体、超声波测距仪二、控制器和光线传感器,所述槽体的顶端表面中心固定设有壳体;所述槽体与运行方向平行的两端均分别固定设有超声波测距仪一和红外测距仪一;所述槽体的两侧均分别固定设有超声波测距仪二和红外测距仪二。本实用新型可达到根据当前环境采用相应的方法测量距离以避开障碍物的有益效果。
3、针对上述中的相关技术,申请人认为,上述的机器人,在使用时虽然可以实现对障碍物的避让绕道形式,但是在一些情况下,例如,沙发、床铺和桌椅等等此类障碍物的底部存在空隙,而上述机器在使用时通常会花费较多时间绕行,不能根据障碍物底部空隙作出相应的高度调整实现越障,为此,我们提出一种具有自适应调节功能的可越障机器人底盘,
技术实现思路
1、为了解决上述问题,本申请提供一种具有自适应调节功能的可越障机器人底盘,采用如下的技术方案:
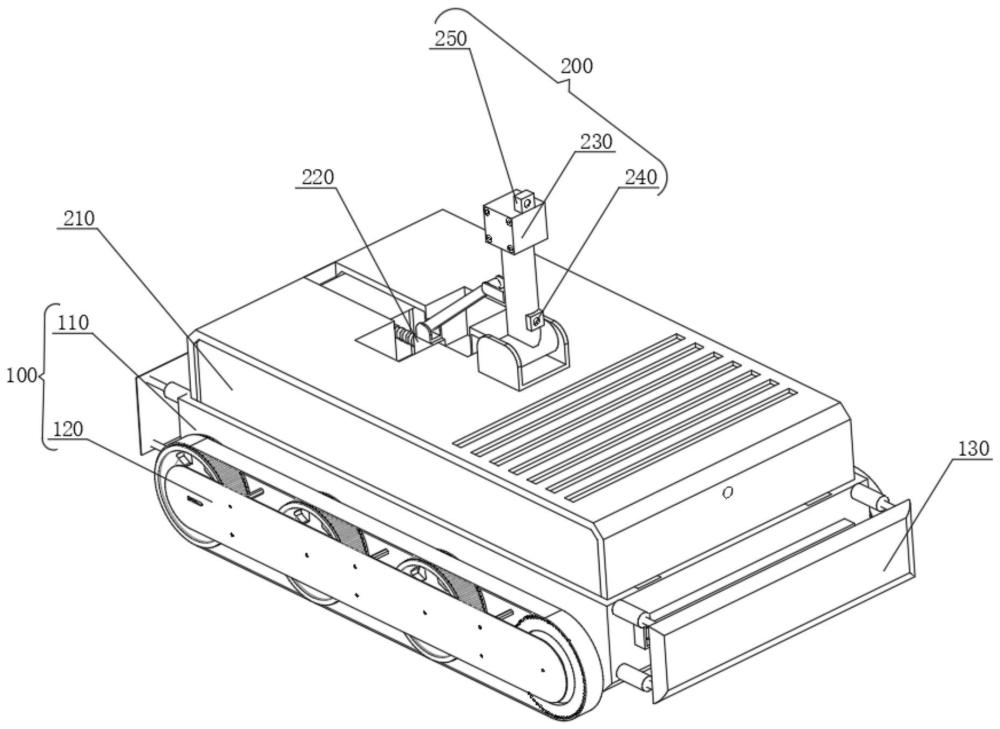
2、一种具有自适应调节功能的可越障机器人底盘,包括主体模块和调整模块,所述主体模块包括下底盘,所述下底盘的两侧均设置有移动履带,所述下底盘的前端面和后端面均设置有缓冲组件,所述调整模块包括活动连接在下底盘内部的上底盘,所述上底盘的内部设置有与下底盘连接的驱动组件,所述上底盘顶部的中心处设置有翻转组件,所述翻转组件与驱动组件连接,所述翻转组件上固定安装有第一测距仪和第二测距仪,所述第一测距仪位于第二测距仪的下方,所述第二测距仪位于翻转组件的顶部,所述第一测距仪和第二测距仪均与驱动组件电性连接。
3、进一步的,所述驱动组件包括固定连接在上底盘内壁顶部的双轴电机,所述双轴电机的两个输出轴均固定连接有丝杆,两个所述丝杆相背的一端分别与上底盘内壁的前端面和后端面转动连接,两个所述丝杆的外表面均螺纹连接有移动块,两个所述移动块与下底盘内壁的底部之间均铰接有第一推杆,所述双轴电机与第一测距仪和第二测距仪电性连接,两个所述丝杆外表面的螺纹相反。
4、通过采用上述技术方案,通过双轴电机的驱动可以使得上底盘在下底盘内部滑动下降。
5、进一步的,所述驱动组件还包括开设在上底盘顶部的转向槽,其中一个所述移动块的顶部铰接有第二推杆,所述第二推杆的一端通过转向槽延伸至上底盘的顶部。
6、通过采用上述技术方案,使得在双轴电机驱动时可以控制翻转组件进行翻转。
7、进一步的,所述翻转组件包括固定连接在上底盘顶部中心处的中空块,所述中空块的内部转动连接有转轴,所述转轴的外表面固定连接有翻转杆,所述翻转杆的顶部固定连接有安装座,所述翻转杆与第二推杆的一端铰接。
8、通过采用上述技术方案,使得双轴电机工作时可以带动翻转组件进行翻转。
9、进一步的,所述安装座的两侧均开设有多个螺纹孔,所述第二测距仪固定连接在安装座的顶部,所述第一测距仪固定安装在翻转杆的外表面。
10、通过采用上述技术方案,可以对拍摄设备进行安装,并通过翻转组件带动其进行翻转。
11、进一步的,所述调整模块还包括开设在上底盘顶部的两个收纳槽,两个所述收纳槽均与转向槽贯通。
12、通过采用上述技术方案,通过收纳槽的设置,可以对翻转后的拍摄设施进行收纳。
13、进一步的,所述缓冲组件包括固定连接在下底盘前端面的中空槽板,所述中空槽板的内部滑动连接有两个滑块,两个所述滑块与中空槽板内壁的两侧之间均设置有阻尼缓冲器,两个所述滑块的内部均铰接有衔接杆,两个所述衔接杆的一端之间铰接有挡板。
14、通过采用上述技术方案,可以对进行冲击力进行缓冲,避免冲击力对底盘造成影响。
15、进一步的,所述缓冲组件还包括四个均设置在挡板和下底盘的前端面之间的伸缩杆,四个所述伸缩杆呈矩形等距离分布。
16、通过采用上述技术方案,可以对挡板进行加固,使得在使用时更加稳固。
17、综上所述,本申请包括以下有益技术效果:
18、(1)本申请通过驱动组件、翻转组件、第一测距仪和第二测距仪的设置,使得在本底盘使用过程中,在出现第二测距仪检测到障碍物而第一测距仪未检测到障碍物时,本底盘可以实现上底盘的下降以及第一测距仪和第二测距仪的翻转,从而通过障碍物的底部缝隙,通过缝隙后进行复原,从而实现本底部实现自适应越障,提升整体机动性;
19、(2)本申请通过阻尼缓冲器、衔接杆、挡板和伸缩杆的设置,使得在本底盘出现碰撞时,可以进行缓冲,从而避免碰撞时产生的冲击力对本底盘造成较大影响,对底盘进行保护。
技术特征:1.一种具有自适应调节功能的可越障机器人底盘,包括主体模块(100)和调整模块(200),其特征在于:所述主体模块(100)包括下底盘(110),所述下底盘(110)的两侧均设置有移动履带(120),所述下底盘(110)的前端面和后端面均设置有缓冲组件(130);
2.根据权利要求1所述的一种具有自适应调节功能的可越障机器人底盘,其特征在于:所述驱动组件(220)包括固定连接在上底盘(210)内壁顶部的双轴电机(221),所述双轴电机(221)的两个输出轴均固定连接有丝杆(222),两个所述丝杆(222)相背的一端分别与上底盘(210)内壁的前端面和后端面转动连接,两个所述丝杆(222)的外表面均螺纹连接有移动块(223),两个所述移动块(223)与下底盘(110)内壁的底部之间均铰接有第一推杆(224),所述双轴电机(221)与第一测距仪(240)和第二测距仪(250)电性连接,两个所述丝杆(222)外表面的螺纹相反。
3.根据权利要求2所述的一种具有自适应调节功能的可越障机器人底盘,其特征在于:所述驱动组件(220)还包括开设在上底盘(210)顶部的转向槽,其中一个所述移动块(223)的顶部铰接有第二推杆(225),所述第二推杆(225)的一端通过转向槽延伸至上底盘(210)的顶部。
4.根据权利要求3所述的一种具有自适应调节功能的可越障机器人底盘,其特征在于:所述翻转组件(230)包括固定连接在上底盘(210)顶部中心处的中空块,所述中空块的内部转动连接有转轴(231),所述转轴(231)的外表面固定连接有翻转杆(232),所述翻转杆(232)的顶部固定连接有安装座(233),所述翻转杆(232)与第二推杆(225)的一端铰接。
5.根据权利要求4所述的一种具有自适应调节功能的可越障机器人底盘,其特征在于:所述安装座(233)的两侧均开设有多个螺纹孔,所述第二测距仪(250)固定连接在安装座(233)的顶部,所述第一测距仪(240)固定安装在翻转杆(232)的外表面。
6.根据权利要求5所述的一种具有自适应调节功能的可越障机器人底盘,其特征在于:所述调整模块(200)还包括开设在上底盘(210)顶部的两个收纳槽(260),两个所述收纳槽(260)均与转向槽贯通。
7.根据权利要求6所述的一种具有自适应调节功能的可越障机器人底盘,其特征在于:所述缓冲组件(130)包括固定连接在下底盘(110)前端面的中空槽板(131),所述中空槽板(131)的内部滑动连接有两个滑块,两个所述滑块与中空槽板(131)内壁的两侧之间均设置有阻尼缓冲器(132),两个所述滑块的内部均铰接有衔接杆(133),两个所述衔接杆(133)的一端之间铰接有挡板(134)。
8.根据权利要求7所述的一种具有自适应调节功能的可越障机器人底盘,其特征在于:所述缓冲组件(130)还包括四个均设置在挡板(134)和下底盘(110)的前端面之间的伸缩杆(135),四个所述伸缩杆(135)呈矩形等距离分布。
技术总结本申请公开了一种具有自适应调节功能的可越障机器人底盘,属于机器人底盘技术领域,包括主体模块和调整模块,所述主体模块包括下底盘,所述下底盘的两侧均设置有移动履带,所述下底盘的前端面和后端面均设置有缓冲组件,所述调整模块包括活动连接在下底盘内部的上底盘,所述上底盘的内部设置有驱动组件,通过驱动组件、翻转组件、第一测距仪和第二测距仪的设置,使得在本底盘使用过程中,在出现第二测距仪检测到障碍物而第一测距仪未检测到障碍物时,本底盘可以实现上底盘的下降以及第一测距仪和第二测距仪的翻转,从而通过障碍物的底部缝隙,通过缝隙后进行复原,从而实现本底部实现自适应越障,提升整体机动性。技术研发人员:段俊快受保护的技术使用者:无锡普菲特工业产品设计有限公司技术研发日:20240227技术公布日:2024/12/23本文地址:https://www.jishuxx.com/zhuanli/20241226/345884.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表