一种无人机视觉动态捕捉的追踪云台的制作方法
- 国知局
- 2025-01-10 13:18:52
本发明涉及无人机,具体是一种无人机视觉动态捕捉的追踪云台。
背景技术:
1、无人机是通过电子遥控设备以及飞行控制系统控制,而不需要飞行员手动控制的飞行器。无人机有多旋翼无人机和固定翼无人机等多种类型,市场上占据主流地位的是轻巧、灵活而且价格相对较低的四旋翼无人机,目前消费类无人机主要以大疆公司的djimavic、mini等系列为主导,无人机硬件的不断发展、飞行控制系统设计的不断优化以及图像智能算法的迅速发展,使得近些年来人们致力于将算法部署在无人机上,让无人机完成一些人们难以完成的工作或达到的目的。
2、机载摄像头赋予了无人机一双眼睛,目标追踪算法赋予了无人机一个大脑,使得无人机可以自主完成一些人力难以完成的工作。例如在地震灾难]现场,可以通过让无人机搭载搜救设备来完成对危险区域的搜寻任务,大大降低救援人员的搜救难度,加快了搜救资源的调度,同时也保障了人员的安全;在电力巡检方面,对于电力工人来说,位于陡峭山区的日常的巡检工作比较困难,使用无人机则可以忽略地理元素的影响,自主完成巡检工作,并安全返航,保障了电力工作人员的人身安全;在精彩的体育赛事中,运动员们的精彩发挥瞬间使用普通相机可能难以抓拍,使用无人机则可以始终保持在最佳角度进行追踪飞行,记录运动员的每个精彩瞬间,为此,我们一种无人机视觉动态捕捉的追踪云台解决上述问题。
技术实现思路
1、本发明的目的在于提供一种无人机视觉动态捕捉的追踪云台,以解决上述背景技术中提出的问题。
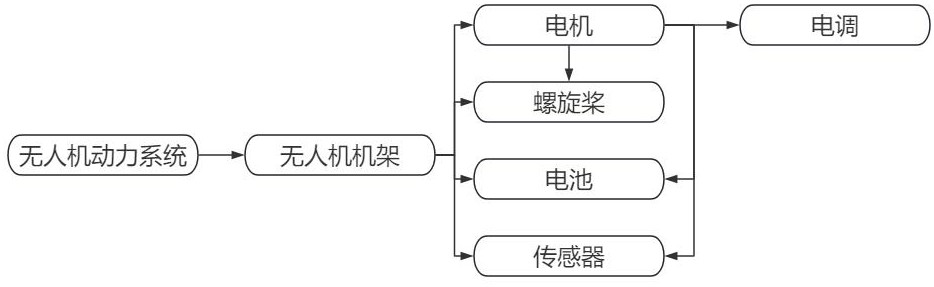
2、本发明的技术方案是:一种无人机视觉动态捕捉的追踪云台,包括无人机动力系统、无人机传感器设计与无人机追踪云台设计,所述无人机的动力系统包括无人机机架,所述无人机机架固定安装有电机,所述电机上固定安装有电调,所述无人机机架固定连接有螺旋桨,所述电机电性连接有电池,所述无人机机架上设置有传感器。
3、优选的,所述传感器上固定安装有陀螺仪,所述传感器上固定安装有磁罗盘,所述无人机机架上固定安装有气压计。
4、优选的,所述电机的输出端与螺旋桨固定连接,所述电机与传感器电性连接。
5、优选的,所述无人机的动力系统设计包括以下步骤:
6、无人机的电机安装时需要保证电机的一头固定在机架力臂的电机座,一头固定螺旋桨,电机需要配合电调一起工作;
7、1)电调:电调主要用于控制电机的转速,动力系统需要适配合适的电调;
8、2)螺旋桨:螺旋桨是直接产生推力的部件,电机驱动螺旋桨转动时,会产生一个反扭力,导致机架反向旋转,通过一个电机正向旋转,一个电机反向旋转,可以互相抵消这种反扭力,最终产生升力协助无人机起飞;
9、3)电池:无人机电池主要采用容量为6000ma锂电池。
10、优选的,所述无人机传感器的设计包括以下步骤:
11、步骤s1:加速度计的主要作用就是提供无人机的加速力,力的方向即xyz三轴,决定无人机在静止状态时的倾斜角度,加速度计同时也被用来提供水平及垂直方向的线性加速,可以用来监测无人机所承受的震动;
12、步骤s2:陀螺仪监测xyz三轴的角速度,计算出俯仰(pitch)、翻滚(roll)和偏摆(yaw)角度的变化率,陀螺仪获取的角度信息的变化能用来维持无人机稳定并防止晃动,陀螺仪还能确保无人机根据用户控制装置所设定的角度旋转;
13、步骤s3:磁罗盘的作用是为无人机提供方向感,可以提供装置在xyz各轴向所承受磁场的数据接着微控制器的算法会对相关磁场数据进行处理,以提供磁北极相关的航向角,最终侦测地理方位的实现就是靠这些数据;
14、步骤s4:在无人机的应用中,磁罗盘除了会被用于感测方向,还可以被用来侦测四周的磁性与含铁金属,如电极、电线、车辆、其他无人机,以避免飞行事故发生;
15、步骤s5:气压计运作是通过大气压力来计算出当前位置高度信息,压力传感器能侦测地球的大气压力,气压计提供的数据能协助无人机导航,并飞行上升到既定的高度;
16、步骤s6:gps为使用者提供无人机的具体位置信息,即便是在视野范围之外也能够通过信号来监测无人机的位置信息。
17、优选的,所述无人机追踪云台设计的步骤如下:
18、步骤s1:安装cygwin,cygwin是windows平台上运行的类unix模拟环境,并且将cygwin_home添加到系统的环境变量中去;
19、步骤s2:安装mavproxy,安装可执行文件并且接受许可和所有默认安装选项;
20、步骤s3:运行sitl,开启一个cygwin64终端,运行sitl启动模拟程序,此时sitl和mavproxy会开启,同时mavproxy会开启三个窗口:第一个可以输入命令直接给sitl,第二个可以显示实时飞控状态与信息,第三个是显示无人机当前位置的地图,可以通过命令/鼠标右键单击来控制无人机移动与执行飞行任务;
21、步骤s4:发送指令给sitl来控制无人机,在这里输入一段命令modeguided;armthrottle;takeoff40;,则无人机会切到引导模式,并增加油门,并起飞到40米高度,再输入以下这段命令rc31500;modecircle;paramsetcircle_radius2000;",此时无人机开启绕圈模式并且将飞行半径设置成2000厘米即20米,如果想让无人机成功返航,只需要输入命令modertl即可:
22、1)下载dronekit-python,同时完成dronckit的编译与安装,安装python2.7;
23、2)运行sitl和mavproxy;
24、3)安装missionplanmer,missionplanner是无人机地面站,也可以用于仿真飞控的连接,这里通过udp连接;
25、步骤s5:运行飞控脚本,首先通过本地的14450端口使用udp连接到sitl模拟器:然后对无人机进行起飞前检查,解锁无人机:接下来将无人机飞行模式切换到“guided”模式,对电机解锁状态进行确认,发送起飞指令,无人机起飞并飞到目标高度,继续发送指令让无人机飞到第一个设置的航点,航点可以通过参数locationglobalrelative设置一定经纬度,然后发送返航指令,无人机会自动返回home点正上方,之后自动降落,达成飞行任务,最终飞行控制模块的输出为控制指令,下一步需要实现将控制指令传输给飞控,进而控制无人机在offboard模式下自主根据计算结果追踪目标。
26、本发明通过改进在此提供一种无人机视觉动态捕捉的追踪云台,与现有技术相比,具有如下改进及优点:
27、其一:本发明,通过云台的稳定性和精度对于获取高质量图像或视频至关重要,通过精确的机械设计和控制系统,云台能够确保摄像头始终指向目标,即使在无人机快速移动或受到外部干扰时也能保持稳定。
28、其二:本发明,通过使用cygwin,开发者可以在windows平台上模拟unix环境,从而能够在更广泛的操作系统上开发和测试无人机飞控系统,sitl(software-in-the-loop)模拟允许开发者在真实飞行之前测试无人机代码和飞控逻辑,减少了因代码错误导致的硬件损坏和飞行事故的风险,mavproxy提供的三个窗口界面,使开发者能够实时监视无人机的状态、发送控制命令,并通过地图窗口直观地控制无人机的移动和飞行任务,提高了开发效率和用户体验,使用dronekit-python和python2.7,开发者能够编写脚本化的飞行控制程序,通过编程接口与sitl模拟器交互,实现对无人机的复杂控制逻辑,通过安装missionplanner这样的无人机地面站软件,开发者可以在仿真环境中模拟真实的飞行控制和任务规划过程,进一步验证飞行逻辑和任务执行的正确性,利用脚本和地面站软件,开发者能够定义高度自定义的飞行任务,包括设置飞行模式、飞行高度、飞行路径等,为无人机应用提供了更大的灵活性,整个流程中的各个组件都是可定制的,可以方便地集成到更大的无人机系统中,或者与其他开发工具和技术栈结合使用,最终飞行控制模块的输出为控制指令,这些指令可以进一步传输给真实的飞控硬件,为在offboard模式下实现自主飞行和追踪目标打下基础。
本文地址:https://www.jishuxx.com/zhuanli/20250110/352350.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表