自动化稠密采样系统、方法及其应用的紫外消毒装置
- 国知局
- 2025-01-10 13:43:08
本发明涉及紫外消毒,更具体地说,它涉及自动化稠密采样系统、方法及其应用的紫外消毒装置。
背景技术:
1、近年来,众多研究已表明,紫外消毒在消毒效果和效率方面均优于人工消毒。在紫外消毒技术领域,依据理论定义,辐照剂量是辐照度在时间上的累计积分值,紫外辐照剂量是影响消毒效果的关键参数,因此准确计算和合理控制辐照剂量,是实现消毒装置高效消毒的核心技术。
2、在现有技术中,近场辐照度分布的探测方案存在以下问题:一方面,探测成本较高;另一方面,探测效率较低。目前尚未提出高效且低成本的稠密测量方案,这使得在消毒装置周围进行快速且稠密的辐照度分布采样变得困难,从而无法获得充分的采样数据,进而难以高效且低成本地将消毒装置的计算值与实际采样值进行对比。这种局限性制约对消毒装置辐照剂量的研究和产品改进。
3、现有技术中的探测成本高主要体现在对紫外灯管近场区域进行点对点辐照度测量时,需要在每个探测点安装一个辐照度计。这意味着所需辐照度计的数量非常庞大,而单个辐照度计的成本本身也相对较高,导致总体探测成本显著增加。此外,现有技术中的探测效率低指的是,若逐个使用辐照度计对探测点进行测量,整个探测过程的效率将会非常低下。
技术实现思路
1、针对背景技术中提出的技术问题,本发明旨在通过自动化稠密采样系统、稠密采样方法完成以较低成本实现高效的自动化稠密采样,解决现有技术中本来难以实现的,如何以较低成本且高效的方法提供更为准确的辐照度分布的技术问题。
2、为解决以上技术问题,本发明首先提供了如下技术方案一:
3、一种自动化稠密采样方法,包括以下步骤:
4、s1、准备工作:
5、选定待采样的管状紫外光辐射源,以及,选定n个紫外光辐照度测量仪器,将其布置在管状紫外光辐射源中心线所在二维平面内;
6、s2、采样工作:
7、启动对n个紫外光辐照度测量仪器当前所在的第一平面内的预设测量区域的测量工作:
8、s2-1、控制n个紫外光辐照度测量仪器扫描第一平面内的预设测量区域的每一个辐照度采集点,以获取当前每一个辐照度采集点的辐照度数值;
9、控制n个紫外光辐照度测量仪器所在平面相较于所述第一平面转动第一预设角度,转动过程以管状紫外光辐射源中心线作为轴线,作为第二平面;
10、启动n个紫外光辐照度测量仪器当前所在的第二平面内的预设测量区域的测量工作:
11、s2-2、控制n个紫外光辐照度测量仪器扫描第二平面内的预设测量区域的每一个辐照度采集点,以获取当前每一个辐照度采集点的辐照度数值;
12、控制n个紫外光辐照度测量仪器所在平面相较于所述第二平面继续转动第一预设角度,转动过程以管状紫外光辐射源中心线作为轴线,作为第三平面;
13、最后,依次控制n个紫外光辐照度测量仪器扫描第三平面至...第m平面内的预设测量区域的每一个辐照度采集点,以最终获取管状紫外光辐射源近场区域内的第二预设角度内的每一个辐照度采集点的辐照度数值;
14、或者,
15、一种自动化稠密采样方法,包括以下步骤:
16、s1’、准备工作:
17、选定待采样的管状紫外光辐射源,以及,选定n个紫外光辐照度测量仪器,将其布置在以管状紫外光辐射源中心线作为轴线的圆柱面内;
18、s2’、采样工作:
19、启动对n个紫外光辐照度测量仪器当前所在的第一圆柱面内的预设测量区域的测量工作:
20、s2-1’、控制n个紫外光辐照度测量仪器扫描第一圆柱面内的预设测量区域的每一个辐照度采集点,以获取当前每一个辐照度采集点的辐照度数值;
21、控制n个紫外光辐照度测量仪器所在圆柱面相较于所述第一圆柱面变化第一预设半径,作为第二圆柱面;
22、启动n个紫外光辐照度测量仪器当前所在的第二圆柱面内的预设测量区域的测量工作:
23、s2-2’、控制n个紫外光辐照度测量仪器扫描第二圆柱面内的预设测量区域的每一个辐照度采集点,以获取当前每一个辐照度采集点的辐照度数值;
24、控制n个紫外光辐照度测量仪器所在圆柱面相较于所述第二圆柱面继续变化第一预设半径,作为第三圆柱面;
25、最后,依次控制n个紫外光辐照度测量仪器扫描第三圆柱面至...第m圆柱面内的预设测量区域的每一个辐照度采集点,以最终获取管状紫外光辐射源近场区域内的预设角度内的每一个辐照度采集点的辐照度数值。
26、通过上述技术方案:本发明自动化稠密采样方法的基本工作原理是,通过控制n个紫外光辐照度计高效自动化扫描近场区域内的每一个采集点,以获取每一个采集点的辐照度数值,提供近场区域的更准确辐照度分布。
27、而扫描过程主要有两种思路,第一种思路是:利用线性分布的n个紫外光辐照度计沿与其连线垂直的方向扫描第一个二维平面内的预设测量区域中的所有采集点,实现对第一个二维平面内的预设测量区域中的所有采集点的探测;再控制第一个二维平面旋转预设角度,形成第二个二维平面...第m平面,以此循环实现对近场区域内所有采集点的探测。
28、第二种思路是:利用布置在圆柱面内的n个紫外光辐照度计,旋转扫描第一个圆柱面内的所有采集点,实现对第一个圆柱面内的预设测量区域中的所有采集点的探测;再控制n个紫外光辐照度计沿半径方向移动,即让第一个圆柱面变化第一预设半径,形成第二个二维圆柱面...第m圆柱面,以此循环实现对近场区域内所有采集点的探测。
29、本发明还提供了如下技术方案二:
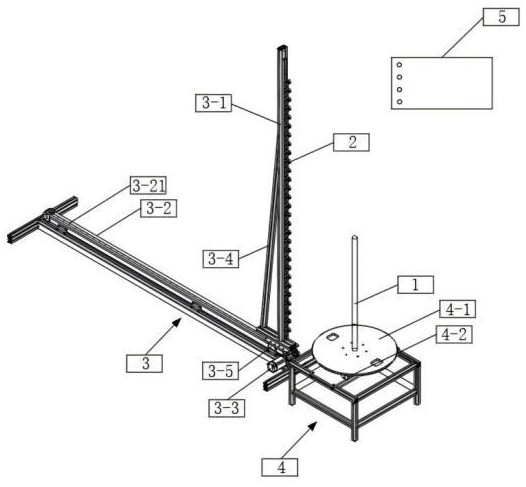
30、一种自动化稠密采样系统,包括:管状紫外光辐射源、n个紫外光辐照度测量仪器、扫描控制器、旋转控制器和数据服务器;
31、n个紫外光辐照度测量仪器与数据服务器通信连接;数据服务器用于接收n个紫外光辐照度测量仪器测得的辐照度数值;
32、n个紫外光辐照度测量仪器位于管状紫外光辐射源中心线所在二维平面内;
33、扫描控制器控制连接于n个紫外光辐照度测量仪器或管状紫外光辐射源,扫描控制器用于控制n个紫外光辐照度测量仪器扫描二维平面内的预设测量区域的每一个辐照度采集点,以获取二维平面内每一个辐照度采集点的辐照度数值;
34、旋转控制器控制连接于n个紫外光辐照度测量仪器或管状紫外光辐射源,旋转控制器用于控制n个紫外光辐照度测量仪器当前位置所在二维平面相较于前一位置所在二维平面转动第一预设角度,转动过程以管状紫外光辐射源中心线作为轴线;
35、或者,
36、一种自动化稠密采样系统,包括:管状紫外光辐射源、n个紫外光辐照度测量仪器、扫描控制器、旋转控制器和数据服务器;
37、n个紫外光辐照度测量仪器与数据服务器通信连接;数据服务器用于接收n个紫外光辐照度测量仪器测得的辐照度数值;
38、n个紫外光辐照度测量仪器位于以管状紫外光辐射源中心线作为轴线的圆柱面内;
39、旋转控制器控制连接于n个紫外光辐照度测量仪器或管状紫外光辐射源,旋转控制器用于控制n个紫外光辐照度测量仪器扫描圆柱面内的预设测量区域的每一个辐照度采集点,以获取当前每一个辐照度采集点的辐照度数值;
40、扫描控制器控制连接于n个紫外光辐照度测量仪器或管状紫外光辐射源,扫描控制器用于控制n个紫外光辐照度测量仪器当前位置所在圆柱面相较于前一位置所在圆柱面的半径增大或减小第一预设半径。
41、通过上述技术方案:本发明自动化稠密采样系统在采样效率和系统成本上做一个合理的平衡,最终实现现实性可实现的更准确的辐照度数值探测。
42、本发明另提供了如下技术方案三:
43、紫外消毒装置,包括消毒装置本体和自动化稠密采样系统,消毒装置本体和自动化稠密采样系统配套使用,自动化稠密采样系统用于对消毒装置本体的近场辐照度进行探测检查。
44、通过上述技术方案:通过本发明稠密采样系统作为紫外消毒装置的配套设施,当紫外消毒装置使用一定周期后,利用稠密采样系统对消毒装置近场区域紫外光进行探测,将探测到的辐照度数值与模型计算的辐照度数值进行对比,判断消毒装置的紫外灯管衰减等级,当确定消毒装置的紫外灯管衰减后,将计算出的衰减程度作为消毒装置参数调整或产品改进的依据。
45、综上所述,本发明具有以下有益效果:
46、(1)现有技术中目前关于近场辐照度探测技术未曾提及稠密采样的探测思路。通常现有技术应用稠密采样的探测思路对紫外灯管近场区域的辐照度进行探测时,每一个探测点的辐照度需要一个辐照度计进行测量,则所需要的辐照度计的数目非常巨大,从而成本更是非常巨大,稠密采样的探测思路现实性实现趋于不可能。另种情况下,假设现有技术采用对数目非常巨大的辐照度探测点逐个探测时,因缺乏自动化设计,探测效率非常低下,现实性实现同样趋于不可能。
47、因此,本发明通过自动化稠密采样系统运行时的稠密采样方法实现自动化高效探测采样。与传统需在每一个探测点安装一个辐照度计的稠密采样技术相比,本发明稠密采样方法、系统可以大大减少辐照度计的使用数量,并利用自动化稠密采样系统运行时的稠密采样方法提供现实性能接受的采样效率,从而本发明在采样效率和系统成本上做一个合理的平衡,最终实现现实性可实现的更准确的辐照度数值探测。
48、(2)通过本发明实现提供更准确的近场辐照度分布后,进一步可以依据近场辐照度分布建立数学模型,即将近场辐照度分布通过数学公式(数学模型)形式进行模拟表达。
49、(3)通过本发明稠密采样方法、系统实现对近场辐照度分布建立数学模型后,将模型应用于消毒装置中时,消毒装置即可通过模型计算知道位于自身周围近场区域内的辐照度分布(辐照度数值),从而能够为紫外消毒装置辐照剂量研究和产品改进提供重要工具。
50、(4)通过本发明稠密采样系统作为紫外消毒装置(消毒机器人)的配套设施,当紫外消毒装置使用一定周期后,利用稠密采样系统对消毒机器人近场区域紫外光进行探测,将探测到的辐照度数值与模型计算的辐照度数值进行对比,判断消毒机器人的紫外灯管衰减等级,当确定消毒机器人的紫外灯管衰减后,将计算出的衰减程度作为消毒机器人参数调整或产品改进的依据。
51、参数调整,例如:
52、①调整辐照度分布模型的初始辐照度数值,从而得到更准确的衰减后的近场辐照度数值;
53、②调整消毒机器人的行走路径,靠近消毒机器人与被消毒物品间的距离,合理控制辐照剂量;
54、③调整消毒机器人的行走速度,减缓消毒机器人的行走速度,延长消毒时间,合理控制辐照剂量。
55、产品改进,例如:
56、①对消毒机器人的紫外灯管更换,确保近场区域模型计算结果与实际近场辐照度分布基本相同。
本文地址:https://www.jishuxx.com/zhuanli/20250110/354903.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表