一种奶酪制作机器人
- 国知局
- 2024-07-12 12:30:57
本发明涉及奶酪制作,具体涉及一种奶酪制作机器人。
背景技术:
1、奶酪又名干酪,是一种发酵的牛奶制品,其性质与常见的酸牛奶有相似之处,都是通过发酵过程来制作的,也都含有可以保健的乳酸菌,但是奶酪的浓度比酸奶更高,近似固体食物,营养价值也因此更加丰富。
2、传统奶酪制作模式是依靠传统工艺和手工操作进行的奶酪制作方式。传统奶酪制作方式需要进行牛奶搅拌、奶块聚拢、乳清排空、捶打、添加辅料等多道工序,工序繁多且操作麻烦。
3、传统奶酪制作模式还存在以下问题和缺陷:
4、1.生产效率低下:传统奶酪制作通常依赖手工操作和传统工艺,生产效率较低,无法满足大规模的市场需求,制作过程需要更多的时间和努力,无法像工业化生产那样实现高效连续生产。
5、2.产品一致性难以保证:传统奶酪制作过程中,由于制作人员的差异、环境变化等因素,不同批次的奶酪可能存在口感、质地和风味的差异。这使得产品的一致性和质量控制较为困难。
技术实现思路
1、为解决上述问题,本发明提供了一种奶酪制作机器人,本发明是通过以下技术方案来实现的。
2、一种奶酪制作机器人,包括:
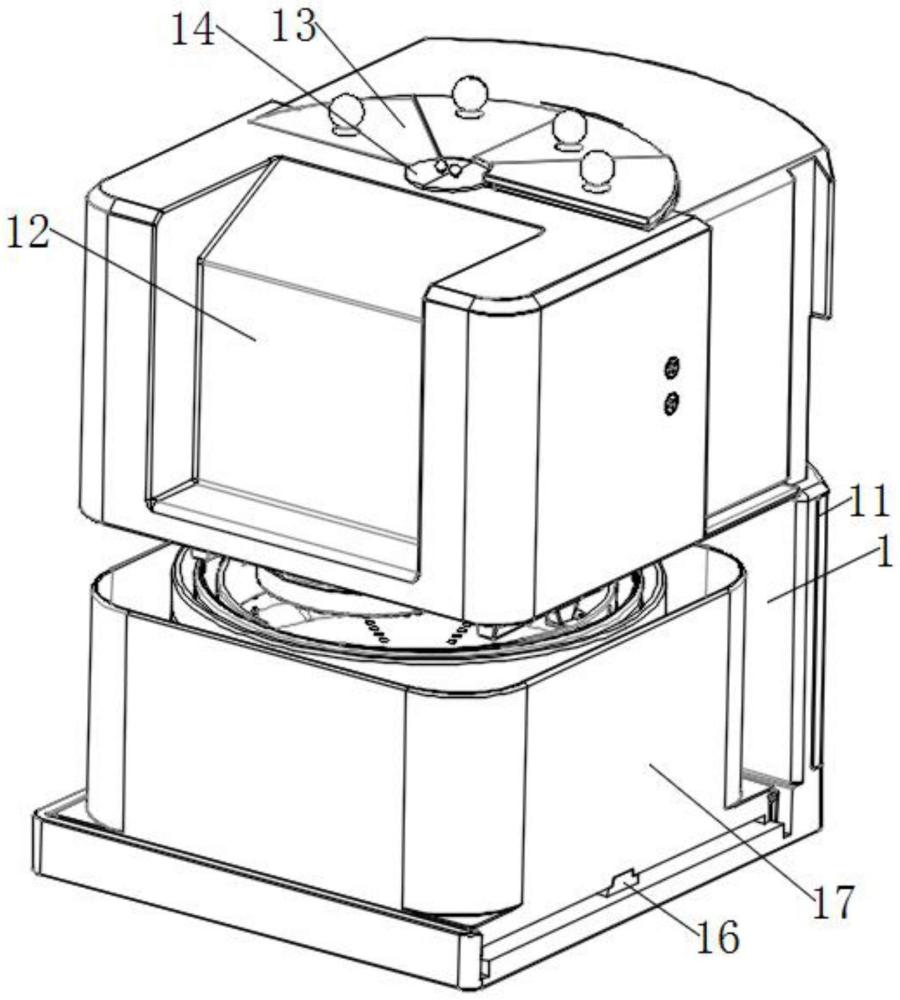
3、支撑架,所述支撑架为l形,支撑架的竖板后侧固接有水箱,支撑架的顶部固接有安装箱,所述安装箱上固接有若干扇形的干果箱,干果箱的交点位置固接有两个半圆形的储料箱,所述储料箱的底部设有电磁球阀;支撑架的底板上固接有滑轨,所述滑轨上滑动连接有滑动箱,滑动箱内固接有水浴锅,所述水浴锅内设有内胆,所述内胆与水浴锅之间形成间隙,内胆的底板下方设有盘状的加热丝,还包括注水管,所述注水管的一端与水箱导通,注水管的另一端与内胆以及水浴锅之间的间隙对齐,滑动箱上固接有出水管,所述出水管的头部与水浴锅连接,且出水管的头部固接有电磁阀;所述内胆中滑动连接有奶酪锅,奶酪锅的底部固接有圆柱体,所述圆柱体经内胆和水浴锅中穿过,奶酪锅上密布有排水口;
4、驱动装置,所述驱动装置上设有固定装置和顶升装置,所述固定装置用于对圆柱体进行固定,所述驱动装置用于带动圆柱体转动,所述顶升装置用于将奶酪锅顶起;
5、搅拌棒、收拢装置、锤压装置和上料装置,所述搅拌棒用于对奶酪锅中的牛奶进行搅拌,所述收拢装置用于将结块的牛奶收拢,所述锤压装置用于将奶酪压实,所述上料装置用于将干果箱中的干果添加到奶酪中。
6、优选的,所述驱动装置包括第一齿圈、第一电机和安装座;所述第一齿圈与滑动箱的底板转动连接,所述第一电机与滑动箱固接,第一电机的输出轴上固接有第一齿轮,第一齿轮的外圈圆周均匀啮合有第二齿轮,所述第二齿轮与第一齿圈啮合,且第二齿轮与滑动箱转动连接,所述安装座固定在第一齿圈上,所述固定装置设置在安装座上。
7、优选的,所述固定装置包括旋转盘、卡盘和第二电机;所述安装座的上表面圆周均匀固接有销轴,所述旋转盘上开设有与销轴对应的连接槽,销轴与连接槽的一侧固接有第一弹簧,旋转盘的内壁圆周均匀铰接有连杆,安装座上还固接有第一转轴,所述卡盘为三角形,卡盘的一角与连杆铰接,卡盘的另一角与第一转轴转动连接,所述第二电机固接在安装座的外壁,第二电机驱动有第一凸轮,还包括推杆,所述安装座上固接有支板,所述推杆与支板滑动连接,推杆的头部固接有推座,所述推座与第一凸轮抵接,推座与支板之间的推杆上套设有第二弹簧,安装座上固接有与推杆对应的耳座。
8、优选的,所述顶升装置包括第三电机和升降台;所述第三电机固接在安装座的中心,第三电机驱动有第三齿轮,安装座上绕第三齿轮圆周均匀转动连接有升降螺杆,所述升降螺杆上固接有与第三齿轮啮合的第四齿轮,所述圆周体的底部开设有空腔,所述升降台滑动连接在空腔中,升降台的底部固接有与升降螺杆啮合的螺纹套。
9、优选的,所述安装箱的底板上固接有安装环,所述安装环固接有壳体,所述壳体上固接有第四电机,所述第四电机驱动有第五齿轮,壳体内转动连接有与第五齿轮啮合的第六齿轮,所述第六齿轮上同心固接有第七齿轮,壳体还还滑动连接有齿条,所述齿条与第七齿轮啮合,所述搅拌棒固接在齿条的底部。
10、优选的,所述收拢装置包括吊架、第五电机、升降框和第六电机;所述吊架固接在安装箱中,吊架内转动连接有第一锥齿轮,第一锥齿轮的两侧啮合有第二锥齿轮,所述第二锥齿轮上固接有伸缩螺杆,所述伸缩螺杆与吊架转动连接,所述第五电机固接在吊架上,第五电机用于驱动第一锥齿轮转动,吊架的两侧滑动连接有伸缩杆,所述伸缩杆与伸缩螺杆啮合,伸缩杆的头部固接有机架,所述升降框与机架滑动连接,升降框的底部固接有收拢板,所述第六电机固接在机架上,第六电机驱动有第三锥齿轮,机架上通过轴杆转动连接有第四锥齿轮,所述第四锥齿轮与第三锥齿轮啮合,轴杆的头部固接有第二凸轮。
11、优选的,所述锤压装置包括驱动仓、摆动架和锤压座;所述驱动仓的上部通过第七电机驱动有蜗杆,驱动仓的下部转动连接有与蜗杆啮合的蜗轮,所述蜗轮上偏心固接有驱动销,所述摆动架的顶部与驱动销铰接,所述锤压座与摆动架的底部铰接。
12、优选的,所述锤压座包括上盖板、与上盖板滑动连接的下盖板、以及设置在上盖板与下盖板之间的第三弹簧。
13、优选的,所述上料装置包括开合座和棘轮;所述安装箱上对应各干果箱底部的位置开设有出料口,安装箱上对应各出料口的位置同心固接有第二齿圈,所述开合座在第二齿圈中圆周均匀布置,各开合座上固接有与第二齿圈啮合的弧形齿板,安装箱的底部通过第八电机驱动有拨盘,所述拨盘上通过扭簧轴铰接有棘爪,所述棘轮绕拨盘等角度布置,棘轮与安装箱转动连接,且棘轮与第二齿圈一一对应,棘轮上偏心铰接有拉杆,所述拉杆的头部固接有圆环,所述圆环上对应各开合座的位置固接有第二转轴,所述开合座与第二转轴转动连接,安装箱的底部还设有落料口。
14、本发明的有益效果是,牛奶放置在奶酪锅中,通过加热丝对牛奶进行水浴加热,搅拌棒下降伸入到奶酪锅中,通过驱动装置带动奶酪锅转动,以实现牛奶的搅拌,在此过程中,储料箱中的柠檬酸和凝乳酶加入,待牛奶凝固后,顶升装置将奶酪锅抬起,聚拢装置将奶块聚拢,从而排出乳清,然后奶酪锅下降,通过驱动装置带动奶酪锅转动,上料装置使干果箱中的干果加入,配合锤压装置,可以将对奶块进行捶打并使干果混入奶块中,本申请可以实现奶酪的自动化生产,可以提高效率,并且通过固定程序的机器生产奶酪,使得产品的一致性较高。
技术特征:1.一种奶酪制作机器人,其特征在于,包括:
2.根据权利要求1所述的一种扫地机器人多机型距离标定工装,其特征在于,所述驱动装置包括第一齿圈、第一电机和安装座;所述第一齿圈与滑动箱的底板转动连接,所述第一电机与滑动箱固接,第一电机的输出轴上固接有第一齿轮,第一齿轮的外圈圆周均匀啮合有第二齿轮,所述第二齿轮与第一齿圈啮合,且第二齿轮与滑动箱转动连接,所述安装座固定在第一齿圈上,所述固定装置设置在安装座上。
3.根据权利要求2所述的一种扫地机器人多机型距离标定工装,其特征在于,所述固定装置包括旋转盘、卡盘和第二电机;所述安装座的上表面圆周均匀固接有销轴,所述旋转盘上开设有与销轴对应的连接槽,销轴与连接槽的一侧固接有第一弹簧,旋转盘的内壁圆周均匀铰接有连杆,安装座上还固接有第一转轴,所述卡盘为三角形,卡盘的一角与连杆铰接,卡盘的另一角与第一转轴转动连接,所述第二电机固接在安装座的外壁,第二电机驱动有第一凸轮,还包括推杆,所述安装座上固接有支板,所述推杆与支板滑动连接,推杆的头部固接有推座,所述推座与第一凸轮抵接,推座与支板之间的推杆上套设有第二弹簧,安装座上固接有与推杆对应的耳座。
4.根据权利要求3所述的一种扫地机器人多机型距离标定工装,其特征在于,所述顶升装置包括第三电机和升降台;所述第三电机固接在安装座的中心,第三电机驱动有第三齿轮,安装座上绕第三齿轮圆周均匀转动连接有升降螺杆,所述升降螺杆上固接有与第三齿轮啮合的第四齿轮,所述圆周体的底部开设有空腔,所述升降台滑动连接在空腔中,升降台的底部固接有与升降螺杆啮合的螺纹套。
5.根据权利要求1所述的一种扫地机器人多机型距离标定工装,其特征在于,所述安装箱的底板上固接有安装环,所述安装环固接有壳体,所述壳体上固接有第四电机,所述第四电机驱动有第五齿轮,壳体内转动连接有与第五齿轮啮合的第六齿轮,所述第六齿轮上同心固接有第七齿轮,壳体还还滑动连接有齿条,所述齿条与第七齿轮啮合,所述搅拌棒固接在齿条的底部。
6.根据权利要求1所述的一种扫地机器人多机型距离标定工装,其特征在于,所述收拢装置包括吊架、第五电机、升降框和第六电机;所述吊架固接在安装箱中,吊架内转动连接有第一锥齿轮,第一锥齿轮的两侧啮合有第二锥齿轮,所述第二锥齿轮上固接有伸缩螺杆,所述伸缩螺杆与吊架转动连接,所述第五电机固接在吊架上,第五电机用于驱动第一锥齿轮转动,吊架的两侧滑动连接有伸缩杆,所述伸缩杆与伸缩螺杆啮合,伸缩杆的头部固接有机架,所述升降框与机架滑动连接,升降框的底部固接有收拢板,所述第六电机固接在机架上,第六电机驱动有第三锥齿轮,机架上通过轴杆转动连接有第四锥齿轮,所述第四锥齿轮与第三锥齿轮啮合,轴杆的头部固接有第二凸轮。
7.根据权利要求1所述的一种扫地机器人多机型距离标定工装,其特征在于,所述锤压装置包括驱动仓、摆动架和锤压座;所述驱动仓的上部通过第七电机驱动有蜗杆,驱动仓的下部转动连接有与蜗杆啮合的蜗轮,所述蜗轮上偏心固接有驱动销,所述摆动架的顶部与驱动销铰接,所述锤压座与摆动架的底部铰接。
8.根据权利要求7所述的一种扫地机器人多机型距离标定工装,其特征在于,所述锤压座包括上盖板、与上盖板滑动连接的下盖板、以及设置在上盖板与下盖板之间的第三弹簧。
9.根据权利要求1所述的一种扫地机器人多机型距离标定工装,其特征在于,所述上料装置包括开合座和棘轮;所述安装箱上对应各干果箱底部的位置开设有出料口,安装箱上对应各出料口的位置同心固接有第二齿圈,所述开合座在第二齿圈中圆周均匀布置,各开合座上固接有与第二齿圈啮合的弧形齿板,安装箱的底部通过第八电机驱动有拨盘,所述拨盘上通过扭簧轴铰接有棘爪,所述棘轮绕拨盘等角度布置,棘轮与安装箱转动连接,且棘轮与第二齿圈一一对应,棘轮上偏心铰接有拉杆,所述拉杆的头部固接有圆环,所述圆环上对应各开合座的位置固接有第二转轴,所述开合座与第二转轴转动连接,安装箱的底部还设有落料口。
技术总结本发明公布了一种奶酪制作机器人,包括支撑架、驱动装置、固定装置、顶升装置、搅拌棒、收拢装置、锤压装置和上料装置,本发明的有益效果是,牛奶放置在奶酪锅中,通过加热丝对牛奶进行水浴加热,搅拌棒下降伸入到奶酪锅中,通过驱动装置带动奶酪锅转动,以实现牛奶的搅拌,在此过程中,储料箱中的柠檬酸和凝乳酶加入,待牛奶凝固后,顶升装置将奶酪锅抬起,聚拢装置将奶块聚拢,从而排出乳清,然后奶酪锅下降,通过驱动装置带动奶酪锅转动,上料装置使干果箱中的干果加入,配合锤压装置,可以将对奶块进行捶打并使干果混入奶块中,本申请可以实现奶酪的自动化生产,可以提高效率,并且通过固定程序的机器生产奶酪,使得产品的一致性较高。技术研发人员:王三众,孙京乙,王文豪,王子凡受保护的技术使用者:燕山大学技术研发日:技术公布日:2024/5/29本文地址:https://www.jishuxx.com/zhuanli/20240614/99074.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表