机械臂及机器人系统的制作方法
- 国知局
- 2024-07-08 10:56:16
本技术涉及机器人设备,尤其涉及一种机械臂及机器人系统。
背景技术:
1、在微创或无创医疗检查及治疗领域常用到各种各样的柔性内窥镜或导管等手术器械。这类器械一般呈细长结构,可通过微创切口、支气管、输尿管、血管等进入人体。以往这类器械都是人工操作和插入,存在定位精度低,医生容易疲劳或必须在放射性环境下操作的问题。随着技术的发展,出现了一批用于插入柔性器械的机器人系统。
2、目前,一些机器人系统包括台车和安装在台车上的机械臂,机械臂的固定端安装在台车上,机械臂从固定端到自由端依次设置有多个转动机构和一个直线移动机构,通过多个转动机构调节机械臂的姿态,通过直线移动机构实现柔性器械的插入。
3、然而,机械臂的自由度有限,限制了机器人系统的适用人群,机器人系统在使用的过程中只允许病人平躺在床上,无法适用于病人因特殊情况只能采用侧卧姿态的情况。此外,机械臂的多个转动机构之间的耦合度高,机械臂的控制困难。
技术实现思路
1、基于此,本实用新型提供了一种机械臂及机器人系统,以解决相关技术中机械臂的自由度有限以及机械臂的控制困难的问题。
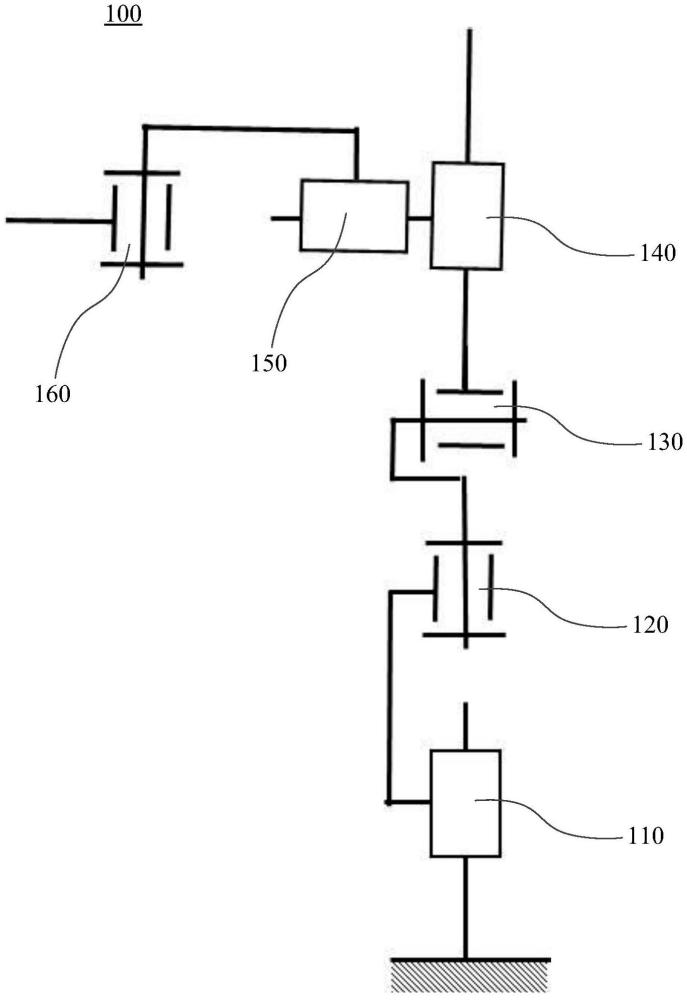
2、一方面,本实用新型提供一种机械臂,机械臂从固定端到自由端依次设置有第一关节、第二关节、第三关节、第四关节、第五关节和第六关节;
3、第一关节、第四关节和第五关节分别为直线关节;
4、第二关节、第三关节和第六关节为转动关节;
5、其中,第一关节的移动轴线平行于第二关节的转动轴线,第一关节的移动轴线倾斜于第五关节的移动轴线,第二关节的转动轴线垂直于第三关节的转动轴线,第二关节的转动轴线和第六关节的转动轴线分别垂直于第三关节的转动轴线,第三关节的转动轴线倾斜于第四关节的移动轴线,第四关节的移动轴线倾斜于第五关节的移动轴线,第四关节的移动轴线平行于第六关节的转动轴线,第五关节的移动轴线倾斜于第六关节的转动轴线。
6、在一种可能的实现方式中,第一关节的移动轴线沿竖直方向延伸,第一关节的移动轴线垂直于第五关节的移动轴线,第三关节的转动轴线垂直于第四关节的移动轴线,第四关节的移动轴线垂直于第五关节的移动轴线。
7、在一种可能的实现方式中,各关节均包括支撑件和驱动单元,第一关节还包括支座,第一关节的驱动单元连接在支座与第一关节对应的支撑件之间,其余关节的驱动单元连接在关节对应的支撑件与相邻关节对应的支撑件之间。
8、在一种可能的实现方式中,机械臂还包括控制器,各关节对应的驱动单元均与控制器电连接,控制器被配置为在第六关节受到外力时控制各关节对应的驱动单元的至少一个运动。
9、在一种可能的实现方式中,第六关节对应的支撑件上安装有把手。
10、在一种可能的实现方式中,把手上设置有激发按钮,激发按钮与控制器电连接。
11、在一种可能的实现方式中,第六关节对应的支撑件上安装有第一力传感器,第一力传感器被配置为获取第六关节所受外力,第一力传感器与控制器电连接。
12、在一种可能的实现方式中,第一关节、第二关节、第三关节、第四关节、第五关节和第六关节均设置有第二力传感器,各第二力传感器分别与控制器电连接。
13、另一方面,本实用新型还提供一种机器人系统,包括台车和上述的机械臂,机械臂的固定端安装于台车上,机械臂的自由端上设置有驱动模块,驱动模块被配置为驱动柔性器械。
14、在一种可能的实现方式中,机器人系统还包括防屈曲导向件,防屈曲导向件的一端与驱动模块连接,柔性器械穿过防屈曲导向件设置。
15、本实用新型提供的机械臂及机器人系统,该机械臂从固定端到自由端依次设置有第一关节、第二关节、第三关节、第四关节、第五关节和第六关节。第一关节、第四关节和第五关节分别为直线关节;第二关节、第三关节和第六关节为转动关节。通过调节第一关节、第四关节和第五关节可以使得机械臂的自由端沿相应关节的移动轴线移动。通过调节第二关节、第三关节和第六关节可以使得机械臂的自由端绕相应关节的转动轴线转动,同时,通过调节第二关节和第三关节还可以调节机械臂自由端的移动方向。这样,机械臂的自由度更多,机器人系统在工作时其机械臂在工作空间内可以实现任意姿态和位置的调整,机器人系统可以适用更多的人群。在手术的过程中,不仅允许病人平躺在床上,还适用于病人因特殊情况只能采用侧卧姿态的情况。此外,本实用新型提供的机械臂,其包括多个直线关节,机械臂的各关节之间耦合性低,当需要调节机械臂自由端的位置和姿态时,其需要调节的关节数量较少,机械臂的控制较为简单、可靠和安全。
技术特征:1.一种机械臂,其特征在于,所述机械臂从固定端到自由端依次设置有第一关节、第二关节、第三关节、第四关节、第五关节和第六关节;
2.根据权利要求1所述的机械臂,其特征在于,所述第一关节的移动轴线沿竖直方向延伸,所述第一关节的移动轴线垂直于所述第五关节的移动轴线,所述第三关节的转动轴线垂直于所述第四关节的移动轴线,所述第四关节的移动轴线垂直于第五关节的移动轴线。
3.根据权利要求1所述的机械臂,其特征在于,各关节均包括支撑件和驱动单元,所述第一关节还包括支座,所述第一关节的驱动单元连接在所述支座与所述第一关节对应的支撑件之间,其余所述关节的驱动单元连接在所述关节对应的支撑件与相邻所述关节对应的支撑件之间。
4.根据权利要求3所述的机械臂,其特征在于,所述机械臂还包括控制器,各所述关节对应的驱动单元均与所述控制器电连接,所述控制器被配置为在所述第六关节受到外力时控制各所述关节对应的驱动单元的至少一个运动。
5.根据权利要求4所述的机械臂,其特征在于,所述第六关节对应的支撑件上安装有把手。
6.根据权利要求5所述的机械臂,其特征在于,所述把手上设置有激发按钮,所述激发按钮与所述控制器电连接。
7.根据权利要求4所述的机械臂,其特征在于,所述第六关节对应的支撑件上安装有第一力传感器,所述第一力传感器被配置为获取所述第六关节所受外力,所述第一力传感器与所述控制器电连接。
8.根据权利要求4所述的机械臂,其特征在于,所述第一关节、所述第二关节、所述第三关节、所述第四关节、所述第五关节和所述第六关节均设置有第二力传感器,各所述第二力传感器分别与所述控制器电连接。
9.一种机器人系统,其特征在于,包括台车和权利要求1-8中任一项所述的机械臂,所述机械臂的固定端安装于所述台车上,所述机械臂的自由端上设置有驱动模块,所述驱动模块被配置为驱动柔性器械。
10.根据权利要求9所述的机器人系统,其特征在于,所述机器人系统还包括防屈曲导向件,所述防屈曲导向件的一端与所述驱动模块连接,所述柔性器械穿过所述防屈曲导向件设置。
技术总结本技术提供一种机械臂及机器人系统,该机械臂依次设置有第一关节、第二关节、第三关节、第四关节、第五关节和第六关节;其中,第一关节的移动轴线平行于第二关节的转动轴线,第一关节的移动轴线倾斜于第五关节的移动轴线,第二关节的转动轴线垂直于第三关节的转动轴线,第二关节的转动轴线和第六关节的转动轴线分别垂直于第三关节的转动轴线,第三关节的转动轴线倾斜于第四关节的移动轴线,第四关节的移动轴线倾斜于第五关节的移动轴线,第四关节的移动轴线平行于第六关节的转动轴线,第五关节的移动轴线倾斜于第六关节的转动轴线。机械臂的自由度更多,可以适用更多的人群。机械臂的各关节之间的耦合度较低,便于更为容易的控制机械臂。技术研发人员:高恒瑞,何伍伟受保护的技术使用者:北京跃维医疗科技有限公司技术研发日:20231030技术公布日:2024/6/11本文地址:https://www.jishuxx.com/zhuanli/20240617/51111.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表