基于数学模型参数迭代的钢轨爬行检测装置定位方法与流程
- 国知局
- 2024-08-01 09:01:32
本技术涉及钢轨爬行检测,尤其涉及一种基于数学模型参数迭代的钢轨爬行检测装置定位方法。
背景技术:
1、现有的轨道结构形式主要包括有砟轨道、板式无砟轨道和钢梁明桥面轨道等。不论哪种轨道结构形式,铁路轨道均承受三个方向的荷载,即作用于轨道的竖向荷载、横向水平荷载及纵向水平荷载。当纵向水平荷载大于轨道抗力(道床阻力、扣件阻力)时,钢轨将相对轨排发生纵向蠕动,这种纵向蠕动一般被称为钢轨爬行,给列车安全运行带来极大风险。
2、为了降低钢轨爬行对列车安全运行带来的风险,检测钢轨爬行位移的算法被广泛的提出并加以应用,其中像序列测量法、单目视觉测量法、双目视觉测量法等方法。由于铁路现场环境恶劣复杂,单目视觉、双目视觉测量法又对拍摄图像质量有一定的要求,导致这两种方法在苛刻的铁路环境下钢轨爬行测量效果表现不佳。
3、图像序列法基于卷积神经网络的标志检测方法,构建编码标志检测及定位模型,对图像序列中的编码标志进行检测和定位。但是卷积神经网络训练成本高,卷积神经网络通常需要大量的数据和计算资源进行训练,训练成本较高维护难度较大。
技术实现思路
1、本技术为解决一种上述卷积神经网络训练成本高,卷积神经网络通常需要大量的数据和计算资源进行训练,训练成本较高维护难度较大的问题,提供一种基于数学模型参数迭代的钢轨爬行检测装置定位方法,方法包括:
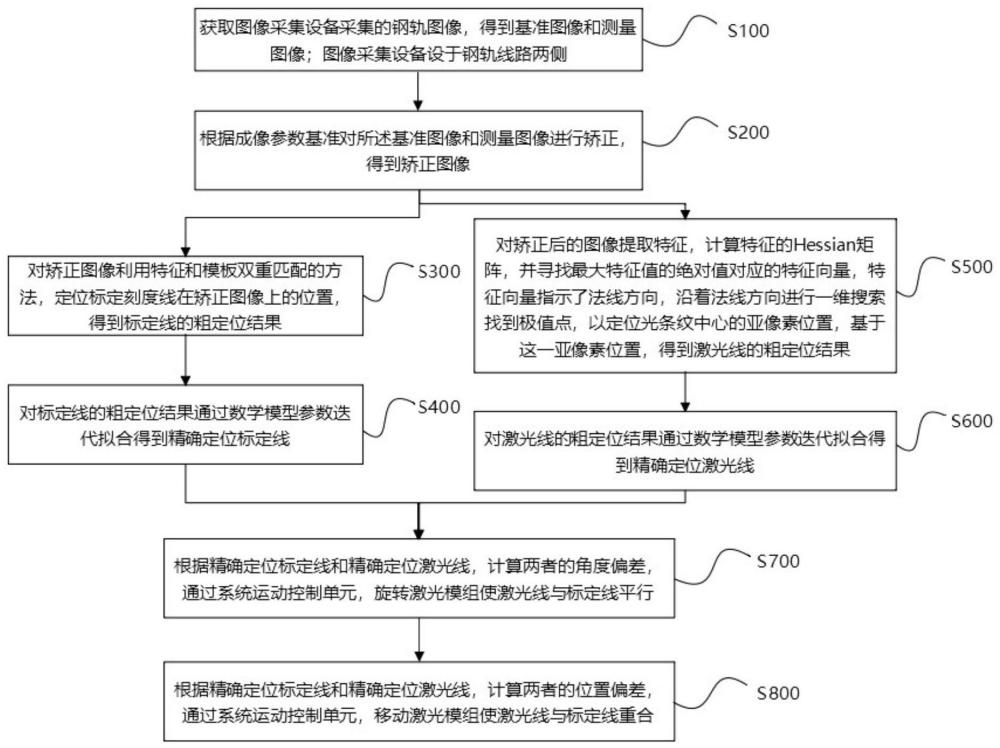
2、获取图像采集设备采集的钢轨图像,得到基准图像和测量图像;所述图像采集设备设于钢轨线路两侧;
3、根据成像参数基准对所述基准图像和所述测量图像进行矫正,得到矫正图像;
4、对所述矫正图像利用特征和模板双重匹配的方法,定位标定刻度线在所述矫正图像上的位置,得到标定线的粗定位结果;
5、对所述标定线的粗定位结果通过数学模型参数迭代拟合得到精确定位标定线;
6、对矫正后的图像提取特征,计算所述特征的hessian矩阵,并寻找最大特征值的绝对值对应的特征向量,所述特征向量指示了法线方向,沿着所述法线方向进行一维搜索找到极值点,以定位光条纹中心的亚像素位置,基于这一亚像素位置,得到激光线的粗定位结果。
7、对所述激光线的粗定位结果通过数学模型参数迭代拟合得到精确定位激光线;
8、根据所述精确定位标定线和所述精确定位激光线,计算两者的角度偏差,通过系统运动控制单元,旋转激光模组使所述激光线与所述标定线平行;
9、根据所述精确定位标定线和所述精确定位激光线,计算两者的位置偏差,通过系统运动控制单元,移动激光模组使所述激光线与所述标定线重合。
10、在一种可行的实现方式中,所述通过数学模型参数迭代拟合得到精确定位标定线或通过数学模型参数迭代拟合得到精确定位激光线包括步骤:
11、从单个连通域内均匀选取5组数据作为初始内点子集,通过所述初始内点子集估算出初始模型;
12、通过所述初始模型测试所述单个连通域内的剩余点,保留内点,舍弃外点;
13、若所述剩余点被归为内点的数量不满足预设数量,则重复上述步骤;
14、若所述剩余点被归为内点的数量满足预设数量,则认为初始模型合理,并将保留的所述内点合并到所述初始内点子集中;
15、采用最小二乘法重新拟合标定线或激光线,并计算拟合误差和内点比例;
16、若所述拟合误差小于预设的最小拟合误差,则认为找到最佳数学模型,终止迭代,并根据所述最佳数学模型,得到所述精确定位标定线或所述精确定位激光线;
17、若所述拟合误差大于或等于预设的最小拟合误差,则重复上述步骤,直至迭代次数上限。
18、在一种可行的实现方式中,所述预设数量为:所述剩余点被归为内点的数量为所述剩余点数量的百分之九十及以上。
19、在一种可行的实现方式中,当达到迭代次数上限后,若当前拟合误差仍大于或等于保留的最小拟合误差,但存在所述剩余点被归为内点的数量满足预设数量,则将得到的所述初始模型作为所述最佳数学模型并输出。
20、在一种可行的实现方式中,所述对矫正后的图像提取特征,计算所述特征的hessian矩阵,并寻找最大特征值的绝对值对应的特征向量,所采用的公式如下:
21、
22、式中,g(x,y)是二维高斯卷积核,用于突出光条的灰度分布特征,z(x,y)是以图像上的点(x,y)为中心,与二维高斯核大小相等的图像矩阵,表示矩阵乘法;其中表示g(x,y)对x的二阶偏导数,表示g(x,y)先对x求偏导数得到再对y求偏导数得到rxx,rxy,ryy为g(x,y)是二维高斯卷积核与z(x,y)图像矩阵,进行运算得出的结果。
23、在一种可行的实现方式中,所述对所述标定刻度线的粗定位结果通过数学模型参数迭代拟合得到精确定位标定线之后还包括:
24、通过所述标定线的所述最佳数学模型获得所述标定线参数方程,并确定所述标定线基于图像水平方向的角度,所述角度范围为0°-180°,确定所述标定线的起始点与终止点。
25、在一种可行的实现方式中,对所述激光线的粗定位结果通过数学模型参数迭代拟合得到精确定位激光线之后还包括:
26、通过所述激光线的所述最佳数学模型获得所述激光线参数方程,并确定所述激光线基于图像水平方向的角度,所述角度范围为0°-180°,确定所述激光线的起始点与终止点。
27、在一种可行的实现方式中,所述根据所述精确定位标定线和所述精确定位激光线,计算两者的角度偏差的步骤包括:
28、根据所述标定线参数方程和所述激光线参数方程;
29、设标志线的参数方程为ax+by+c=0,激光线的参数方程为dx+ey+f=0;
30、通过下式计算出所述标志线与所述激光线的角度偏差:
31、
32、式中,θ表示标志线和激光线的之间的夹角,a、b、c表示标志线方程的参数,d、e、f表示激光线方程的参数。
33、在一种可行的实现方式中,所述根据所述精确定位标定线和所述精确定位激光线,计算两者的位置偏差的步骤包括:
34、根据所述标定线的起始点与终止点和所述激光线的起始点与终止点,计算所述标定线的起始点与所述激光线的起始点的位置偏差,以及所述标定线的终止点与所述激光线的终止点的位置偏差。
35、在一种可行的实现方式中,根据权利要求1所述的基于数学模型参数迭代的钢轨爬行检测装置定位方法,其特征在于,在所述获取图像采集设备采集的钢轨图像之前还包括:
36、在所述钢轨线路上安装图像采集设备,在所述钢轨线路两侧安装十字混凝土基桩,并在所述十字混凝土基桩上放置所述激光归零刻度标,在被测钢轨轨腰处粘贴所述测量标尺。
37、由上述内容可知,本技术提供一种基于数学模型参数迭代的钢轨爬行检测装置定位方法,通过得到标定线的粗定位结果,再对所述标定线的粗定位结果通过数学模型参数迭代拟合得到精确定位标定线;得到激光线的粗定位结果,再对所述激光线的粗定位结果通过数学模型参数迭代拟合得到精确定位激光线;根据所述精确定位标定线和所述精确定位激光线,计算两者的角度偏差和位置偏差,通过系统运动控制单元,旋转激光模组使所述激光线与所述标定线平行再重合。本技术通过平移和旋转将激光线调整到和标志线一致,这样可以大大降低便携式一体机的一致性及安装精度,真正实现便携式和测量一致性的统一并显著降低测量误差并提高测量精度。
本文地址:https://www.jishuxx.com/zhuanli/20240718/234496.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。