巡检机器人的爬坡装置的制作方法
- 国知局
- 2024-08-02 16:20:18
本公开涉及巡检机器人,具体地,涉及一种巡检机器人的爬坡装置。
背景技术:
1、相关技术中,矿用挂轨巡检机器人通常以吊挂的方式沿着工字钢或h形钢轨等轨道在煤矿井下行走,在巡检机器人在行走过程中,煤矿井下的煤泥粉尘和水汽容易附着在轨道表面,进而容易造成轨道表面的摩擦因数减小,巡检机器人在轨道表面移动过程中会产生打滑或者溜车等安全隐患,如果刹车效果不佳,在煤矿井下巡检机器人有可能会对井下人员造成伤害,因此,保证巡检机器人在溜车情况发生时,能够平稳驻车是煤矿井下安全作业的前提。
技术实现思路
1、本公开的目的是提供一种巡检机器人的爬坡装置,该巡检机器人的爬坡装置能够在巡检机器人在轨道上发生溜车情况时,对巡检机器人进行刹车以能够平稳驻车,以至少部分地解决上述技术问题。
2、为了实现上述目的,本公开提供一种巡检机器人的爬坡装置,包括:轨道机构,包括相互连接的水平轨道和倾斜轨道;和驱动机构,包括用于安装巡检机器人的安装架和可转动地安装在所述安装架且能够沿所述轨道机构的水平轨道和倾斜轨道移动的走轮组件;以及制动机构,包括连接于所述走轮组件的触发组件和制动组件,所述制动组件具有能够抵接于所述轨道机构的制动位置,和远离所述轨道机构的非制动位置;所述触发组件配置为能够在所述走轮组件的转速超过预设值时,控制所述制动组件由所述非制动位置切换至所述制动位置,以对所述驱动机构进行制动。
3、可选地,所述触发组件包括:转动盘,同轴连接于所述走轮组件;第一制动件,连接于所述转动盘,所述第一制动件具有收纳位置和伸出位置,在所述收纳位置,所述第一制动件位于所述转动盘内,在所述伸出位置,所述第一制动件的一端伸出于所述转动盘且能够驱动所述制动组件由所述非制动位置切换至所述制动位置。
4、可选地,所述第一制动件包括:安装槽,位于所述转动盘内;活塞,活动连接于所述安装槽且能够在所述安装槽的限位下伸出或收纳于所述转动盘;以及弹性锁止件,位于所述安装槽内,所述弹性锁止件用于将所述活塞处于所述转动盘内时对所述活塞进行锁止。
5、可选地,所述弹性锁止件包括一端连接于所述安装槽内壁的弹簧,以及连接于所述弹簧的楔形块,所述楔形块用于可操作地抵接于所述活塞的侧壁。
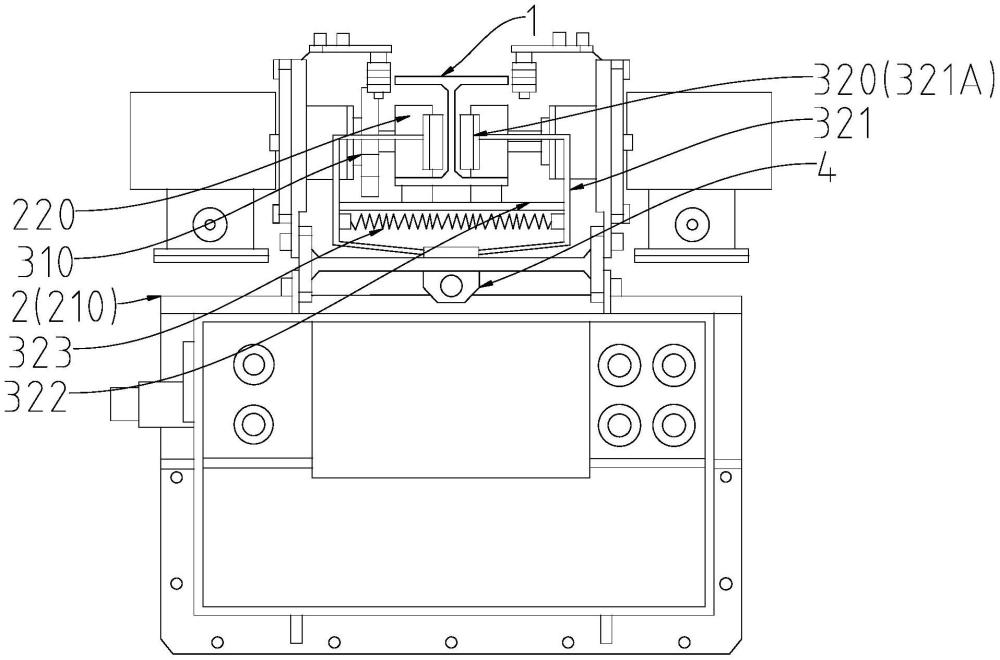
6、可选地,所述制动组件包括:支撑架,数量为两个且通过铰链机构分设在所述轨道机构的相对两侧,所述支撑架远离所述铰链机构的一端设有可操作地抵接于所述轨道机构的刹车片,所述两个支撑架均设有滑槽,至少一个所述支撑架在所述滑槽的一端设有通孔;支撑杆,两端分别抵接于所述滑槽且可沿所述滑槽的延伸方向移动,所述支撑杆能够在移动至所述通孔位置后穿过所述通孔;以及弹性件,两端分别连接于两个所述支撑架的表面,用于在所述支撑杆穿过所述通孔后为所述支撑架上的刹车片提供朝向所述轨道机构的力。
7、可选地,所述走轮组件包括位于所述轨道机构同一侧的主动轮和从动轮,所述安装架连接有位于所述轨道机构另一侧的压紧轮,在所述走轮组件沿所述轨道机构移动时,所述主动轮、所述从动轮以及所述压紧轮共同压紧于所述轨道机构。
8、可选地,所述触发组件连接于所述主动轮或所述从动轮中的任意一者。
9、可选地,所述轨道机构还包括垫层,所述垫层贴合在所述倾斜轨道上,所述垫层位于所述压紧轮和所述倾斜轨道之间。
10、可选地,所述轨道机构还包括过渡层,所述过渡层贴合在所述水平轨道上,且位于所述水平轨道和所述压紧轮之间,所述过渡层的厚度沿靠近所述倾斜轨道的方向逐渐增大。
11、可选地,所述过渡层与所述垫层连接,所述过渡层的最大厚度与所述垫层相等。
12、通过上述技术方案,即本公开所提供的巡检机器人的爬坡装置,在走轮组件沿着倾斜轨道向上爬坡时,若出现动力不足而有溜车的情况发生时,走轮组件会迅速从倾斜轨道由高向低滑动,此时走轮组件的自身转速会加快,而在走轮组件的自身转速加快后,连接于走轮组件的触发组件会将制动组件由非制动位置切换至制动位置,进而可以对驱动机构中的走轮组件进行制动,进而可以达到刹车的效果,能够防止巡检机器人进一步产生溜车的危险,能够对巡检机器人进行平稳驻车。
13、本公开的其他特征和优点将在随后的具体实施方式部分予以详细说明。
技术特征:1.一种巡检机器人的爬坡装置,其特征在于,包括:
2.根据权利要求1所述的巡检机器人的爬坡装置,其特征在于,所述触发组件包括:
3.根据权利要求2所述的巡检机器人的爬坡装置,其特征在于,所述第一制动件包括:
4.根据权利要求3所述的巡检机器人的爬坡装置,其特征在于,所述弹性锁止件包括一端连接于所述安装槽内壁的弹簧,以及连接于所述弹簧的楔形块,所述楔形块用于可操作地抵接于所述活塞的侧壁。
5.根据权利要求4所述的巡检机器人的爬坡装置,其特征在于,所述制动组件包括:
6.根据权利要求1所述的巡检机器人的爬坡装置,其特征在于,所述走轮组件包括位于所述轨道机构同一侧的主动轮和从动轮,所述安装架连接有位于所述轨道机构另一侧的压紧轮,在所述走轮组件沿所述轨道机构移动时,所述主动轮、所述从动轮以及所述压紧轮共同压紧于所述轨道机构。
7.根据权利要求6所述的巡检机器人的爬坡装置,其特征在于,所述触发组件连接于所述主动轮或所述从动轮中的任意一者。
8.根据权利要求7所述的巡检机器人的爬坡装置,其特征在于,所述轨道机构还包括垫层,所述垫层贴合在所述倾斜轨道上,所述垫层位于所述压紧轮和所述倾斜轨道之间。
9.根据权利要求8所述的巡检机器人的爬坡装置,其特征在于,所述轨道机构还包括过渡层,所述过渡层贴合在所述水平轨道上,且位于所述水平轨道和所述压紧轮之间,所述过渡层的厚度沿靠近所述倾斜轨道的方向逐渐增大。
10.根据权利要求9所述的巡检机器人的爬坡装置,其特征在于,所述过渡层与所述垫层连接,所述过渡层的最大厚度与所述垫层相等。
技术总结本公开涉及一种巡检机器人的爬坡装置,包括轨道机构、驱动机构和制动机构,轨道机构包括相互连接的水平轨道和倾斜轨道;驱动机构包括用于安装巡检机器人的安装架和可转动地安装在安装架且能够沿轨道机构的水平轨道和倾斜轨道移动的走轮组件;制动机构包括连接于走轮组件的触发组件和制动组件,制动组件具有能够抵接于轨道机构的制动位置,和远离轨道机构的非制动位置;触发组件配置为能够在走轮组件的转速超过预设值时,控制制动组件由非制动位置切换至制动位置,以对驱动机构进行制动,该巡检机器人的爬坡装置能够在巡检机器人在轨道上发生溜车的情况时,对巡检机器人进行刹车以能够平稳驻车。技术研发人员:徐树,韩佳安,李国浦,袁野,魏琨雨,陈录受保护的技术使用者:国家能源集团内蒙古电力有限公司技术研发日:20231207技术公布日:2024/7/11本文地址:https://www.jishuxx.com/zhuanli/20240718/250295.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。