车辆控制方法、装置、存储介质、控制器及车辆与流程
- 国知局
- 2024-08-02 16:33:02
本公开涉及车辆控制领域,具体地,涉及一种车辆控制方法、装置、存储介质、控制器及车辆。
背景技术:
1、车辆的行驶安全性是关系到用户和社会安全的重大问题,随着车辆保有量的上升,交通事故的发生数量也会随之增加,而在引发交通事故的场景中,碰撞事故通常占据着较大比例。因而,如何减少车辆碰撞事故的发生,对于车辆安全性的提高、减少碰撞事故的人员伤亡、减少车辆损失等具有重要意义。
技术实现思路
1、本公开的目的是提供一种车辆控制方法、装置、存储介质、控制器及车辆,以降低车辆碰撞风险,提升车辆安全性。
2、为了实现上述目的,根据本公开的第一方面,提供一种车辆控制方法,所述方法包括:
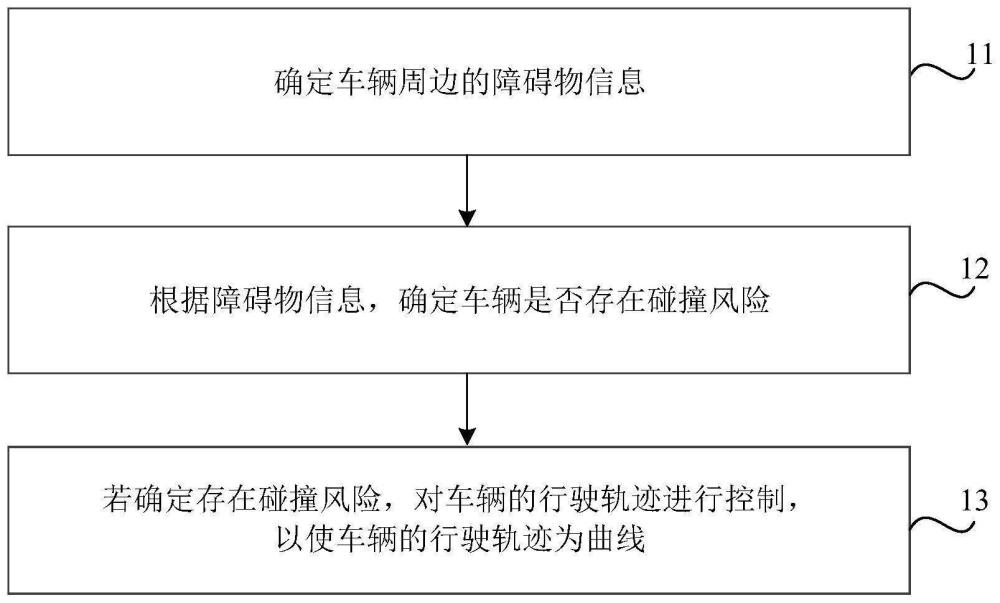
3、确定车辆周边的障碍物信息;
4、根据所述障碍物信息,确定所述车辆是否存在碰撞风险;
5、若确定存在碰撞风险,对所述车辆的行驶轨迹进行控制,以使所述车辆的行驶轨迹为曲线。
6、可选地,所述根据所述障碍物信息,确定所述车辆是否存在碰撞风险,包括:
7、根据所述障碍物信息,确定是否存在符合预设条件的目标障碍物;
8、若存在所述目标障碍物,获取所述车辆的第一速度、所述目标障碍物的第二速度、以及所述车辆与所述目标障碍物之间的第一距离;
9、若所述第一速度大于所述第二速度,确定所述车辆由所述第一速度减速至所述第二速度行驶的第二距离和对应的减速时段;
10、确定所述目标障碍物在所述减速时段内运行的第三距离;
11、通过比较所述第一距离和所述第三距离之和与所述第二距离的大小,确定所述车辆是否存在碰撞风险。
12、可选地,所述根据所述障碍物信息,确定是否存在符合预设条件的目标障碍物,包括:
13、根据所述障碍物信息,确定是否存在位于所述车辆的行驶方向上的障碍物;
14、若存在位于所述车辆的行驶方向上的障碍物,确定存在所述目标障碍物,其中,所述目标障碍物为所述位于所述车辆的行驶方向上的障碍物中的至少一者。
15、可选地,所述通过比较所述第一距离和所述第三距离之和与所述第二距离的大小,确定所述车辆是否存在碰撞风险,包括:
16、若所述第一距离和所述第三距离之和大于所述第二距离,确定所述车辆不存在碰撞风险;
17、若所述第一距离和所述第三距离之和小于所述第二距离,确定所述车辆存在碰撞风险。
18、可选地,所述对所述车辆的行驶轨迹进行控制,以使所述车辆的行驶轨迹为曲线,包括:
19、控制所述车辆的车轮在向左侧转向和向右侧转向之间切换,以使所述车辆在目标车道内沿曲线行驶,所述目标车道为所述车辆所在的车道。
20、可选地,所述控制所述车辆的车轮在向左侧转向和向右侧转向之间切换,包括:
21、获取目标车道对应于第一侧的边缘与所述车辆之间的第一间距,以及目标车道对应于第二侧的边缘与所述车辆之间的第二间距,所述第一侧为所述车辆的左侧或右侧,所述第二侧与所述第一侧相反;
22、当检测到所述第一间距小于第一预设间距时,控制所述车辆的车轮向所述第二侧转向;
23、当检测到所述第二间距小于所述第一预设间距时,控制所述车辆的车轮向所述第一侧转向。
24、可选地,所述控制所述车辆的车轮在向左侧转向和向右侧转向之间切换,包括:
25、获取目标车道对应于目标侧的边缘与所述车辆之间的目标间距,所述目标侧为所述车辆的左侧或右侧;
26、当检测到所述目标间距小于第二预设间距时,控制所述车辆的车轮向与所述目标侧相反的一侧转向;
27、当检测到所述目标间距大于第三预设间距时,控制所述车辆的车轮项所述目标侧转向;
28、其中,所述第二预设间距小于或等于所述第三预设间距。
29、可选地,所述车辆的车轮转向的角度与转向时的车速呈负相关关系。
30、根据本公开的第二方面,提供一种车辆控制装置,所述装置包括:
31、第一确定模块,用于确定车辆周边的障碍物信息;
32、第二确定模块,用于根据所述障碍物信息,确定所述车辆是否存在碰撞风险;
33、控制模块,用于若确定存在碰撞风险,对所述车辆的行驶轨迹进行控制,以使所述车辆的行驶轨迹为曲线。
34、根据本公开的第三方面,提供一种非临时性计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现本公开第一方面所述的车辆控制方法的步骤。
35、根据本公开的第四方面,提供一种控制器,包括:
36、存储器,其上存储有计算机程序;
37、处理器,用于执行所述存储器中的所述计算机程序,以实现本公开第一方面所述的车辆控制方法的步骤。
38、根据本公开的第五方面,提供一种车辆,包括本公开第四方面所述的控制器。
39、通过上述技术方案,通过车辆周边的障碍物信息,确定车辆是否存在碰撞风险,并在识别到车辆存在碰撞风险的情况下,对车辆的行驶轨迹进行控制,使车辆能够沿曲线行驶。由此,通过将车辆的行驶轨迹调整为曲线,增加车辆行驶过的路程,使得车辆在通过曲线行驶接近存在碰撞风险的障碍物过程中,受到风阻、滚阻等因素的作用,能够尽可能消耗掉自身的运动能量,以避免碰撞发生,而即便车辆最终发生了碰撞,也能通过对车辆运动能量的消耗减小碰撞时的冲击力。以及,车辆的曲线行驶也能够在一定程度上引起车内人员的注意,进而提醒车内人员及时采取安全措施。从而,能够降低车辆的碰撞风险,保证车辆安全性。
40、本公开的其他特征和优点将在随后的具体实施方式部分予以详细说明。
技术特征:1.一种车辆控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述根据所述障碍物信息,确定所述车辆是否存在碰撞风险,包括:
3.根据权利要求2所述的方法,其特征在于,所述根据所述障碍物信息,确定是否存在符合预设条件的目标障碍物,包括:
4.根据权利要求2所述的方法,其特征在于,所述通过比较所述第一距离和所述第三距离之和与所述第二距离的大小,确定所述车辆是否存在碰撞风险,包括:
5.根据权利要求1所述的方法,其特征在于,所述对所述车辆的行驶轨迹进行控制,以使所述车辆的行驶轨迹为曲线,包括:
6.根据权利要求5所述的方法,其特征在于,所述控制所述车辆的车轮在向左侧转向和向右侧转向之间切换,包括:
7.根据权利要求5所述的方法,其特征在于,所述控制所述车辆的车轮在向左侧转向和向右侧转向之间切换,包括:
8.根据权利要求5-7中任一项所述的方法,其特征在于,所述车辆的车轮转向的角度与转向时的车速呈负相关关系。
9.一种车辆控制装置,其特征在于,所述装置包括:
10.一种非临时性计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现权利要求1-8中任一项所述的车辆控制方法的步骤。
11.一种控制器,其特征在于,包括:
12.一种车辆,其特征在于,包括权利要求11所述的控制器。
技术总结本公开涉及一种车辆控制方法、装置、存储介质、控制器及车辆。所述方法包括:确定车辆周边的障碍物信息;根据障碍物信息,确定车辆是否存在碰撞风险;若确定存在碰撞风险,对车辆的行驶轨迹进行控制,以使车辆的行驶轨迹为曲线。通过将车辆的行驶轨迹调整为曲线,增加车辆行驶过的路程,使车辆在通过曲线行驶接近存在碰撞风险的障碍物过程中,受到风阻、滚阻等因素的作用,尽可能消耗掉自身的运动能量,避免碰撞发生,而即便车辆最终发生了碰撞,也能通过对车辆运动能量的消耗减小碰撞时的冲击力。车辆的曲线行驶能够在一定程度上引起车内人员的注意,提醒车内人员采取安全措施。从而,能降低车辆的碰撞风险,保证车辆安全性。技术研发人员:林华南,石登仁,江能辉,廖涛,梁震受保护的技术使用者:比亚迪股份有限公司技术研发日:技术公布日:2024/7/4本文地址:https://www.jishuxx.com/zhuanli/20240718/251233.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表