座椅悬架半主动控制方法及座椅悬架与流程
- 国知局
- 2024-08-02 16:34:33
本发明主要涉及座椅悬架半主动控制,尤其涉及一种座椅悬架半主动控制方法及座椅悬架。
背景技术:
1、座椅悬架是连接人员和车厢的减振系统,座椅悬架的好坏,直接影响乘客乘车感受。车辆座椅悬架按照执行机构和控制方法不同,分为被动悬架、半主动悬架和主动悬架。被动悬架具有可靠性高、结构简单、成本低等优点。但是被动悬架的刚度和阻尼一旦设计完成则保持不变,只能适应一种颠簸路面。主动悬架是在被动悬架的基础上增加一个主动执行机构,需要外界输入能量,并结合主动控制器同时工作。主动悬架控制算法能够适应不同路面颠簸程度,具有较好的减振效果,但是结构复杂、成本高、可靠性较低。半主动悬架是在被动悬架的基础上,将固定刚度和固定阻尼器变成可变刚度和可变阻尼器,并结合半主动控制器同时工作。半主动悬架结合了被动悬架和主动悬架的大部分优点,具有能耗低、实现简单、安全性高等优势得到广泛的研究和应用。
2、针对半主动控制算法主要有天棚阻尼(skyhook,sh)和加速度阻尼(accelerationdriven damper,add)控制,其中sh算法适用于座椅的低频振动,add算法适用于高频振动。目前缺乏一种能对低频段和高频段的车辆振动都有明显抑制效果的算法。
技术实现思路
1、本发明要解决的技术问题是提供一种座椅悬架半主动控制方法及座椅悬架,解决目前缺乏一种能对低频段和高频段的车辆振动都有明显抑制效果的座椅悬架。
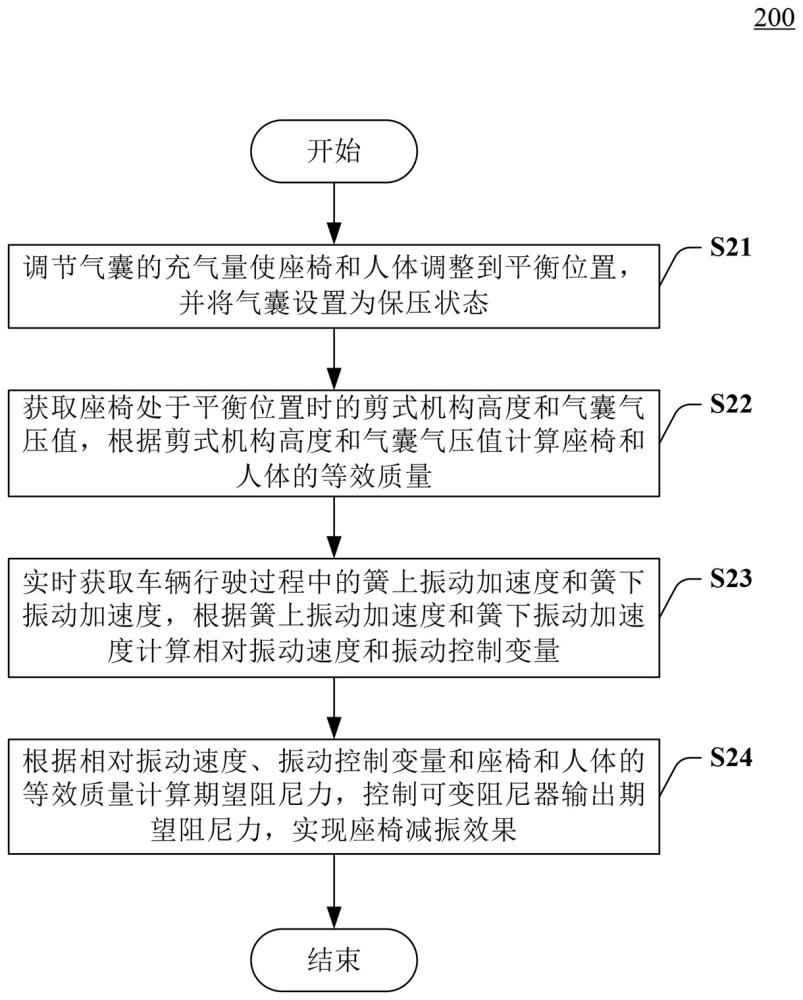
2、为解决上述技术问题,本发明提供了一种座椅悬架半主动控制方法,所述座椅悬架包括剪式机构、与剪式机构的支撑臂连接的气囊和可变阻尼器,包括:调节气囊的充气量使座椅和人体调整到平衡位置,并将所述气囊设置为保压状态;获取座椅处于平衡位置时的剪式机构高度和气囊气压值,根据所述剪式机构高度和所述气囊气压值计算座椅和人体的等效质量;实时获取车辆行驶过程中的簧上振动加速度和簧下振动加速度,根据所述簧上振动加速度和簧下振动加速度计算相对振动速度和振动控制变量;根据所述相对振动速度、所述振动控制变量和所述座椅和人体的等效质量计算期望阻尼力,控制所述可变阻尼器输出所述期望阻尼力,实现座椅减振效果。
3、可选地,根据所述簧上振动加速度和簧下振动加速度计算振动控制变量包括:将所述簧下振动加速度输入到控制系统,所述控制系统根据所述簧下振动加速度计算出所述振动控制变量;
4、其中所述振动控制变量的计算公式为:
5、,
6、s为所述振动控制变量,为所述簧下振动加速度,为簧下振动速度,为高频与低频的分界点。
7、可选地,所述控制系统的传递函数w为:
8、,
9、其中,为高频与低频的分界点,s为复变量。
10、可选地,根据所述簧上振动加速度和簧下振动加速度计算得到相对振动速度包括:对所述簧上振动加速度和簧下振动加速度进行积分得到簧上振动速度和簧下振动速度;将所述簧上振动速度减去所述簧下振动速度得到所述相对振动速度。
11、可选地,还包括:在进行积分之前,滤除所述簧上振动加速度和簧下振动加速度的高频噪声。
12、可选地,根据所述相对振动速度、所述振动控制变量和所述座椅和人体的等效质量计算期望阻尼力包括:计算的值,其中s为所述振动控制变量,为所述相对振动速度;当≤0时,所述期望阻尼力等于所述可变阻尼器能提供的最小阻尼力;当>0时,所述期望阻尼力与所述簧上振动速度和所述簧上振动加速度成正比。
13、可选地,还包括:当>0时,判断所述期望阻尼力是否大于所述可变阻尼器能提供的最大阻尼力,如果大于,则将所述最大阻尼力作为所述期望阻尼力。
14、可选地,当>0时,通过如下公式计算所述期望阻尼力:
15、,
16、,
17、其中,为所述期望阻尼力,为天棚阻尼系数,为加速度阻尼系数,为所述簧上振动加速度,为簧上振动速度,为所述座椅和人体的等效质量,为重力加速度。
18、可选地,通过如下公式计算座椅和人体的等效质量:
19、,
20、其中,为所述座椅和人体的等效质量,为重力加速度,为剪式机构底边长度,为所述气囊气压值,为气囊的有效作用面积,为所述剪式机构高度,为剪式机构斜边长度。
21、可选地,调节气囊的充气量使座椅和人体调整到平衡位置包括:通过位移传感器实时检测剪式机构高度,当所述剪式机构高度低于设定的高度范围下限时,气囊开始充气,当所述剪式机构高度高于设定高度的上限时,气囊开始放气,当所述剪式机构高度位于设定的高度范围内时,气囊处于保压状态,座椅和人体调整到平衡位置。
22、为解决上述技术问题,本发明提供了一种座椅悬架,包括剪式机构、与剪式机构的支撑臂连接的气囊和可变阻尼器,还包括:位移传感器,用于获取剪式机构高度;气压传感器,用于获取座椅处于平衡位置时的气囊气压值;加速度计,用于获取车辆行驶过程中的簧上振动加速度和簧下振动加速度;气囊控制模块,用于调节气囊的充气量使座椅和人体调整到平衡位置;阻尼器控制模块,用于根据平衡位置的剪式机构高度和所述气囊气压值计算座椅和人体的等效质量,根据所述簧上振动加速度和簧下振动加速度计算相对振动速度和振动控制变量,根据所述相对振动速度、所述振动控制变量和所述座椅和人体的等效质量计算期望阻尼力,控制所述可变阻尼器输出所述期望阻尼力,实现座椅减振效果。
23、可选地,所述气囊控制模块包括气泵、单向阀、汇流板、气管、电磁阀和控制器;其中,气泵、单向阀、汇流板、气管依次连接,所述气管与气囊连接,所述电磁阀与所述汇流板连接,所述控制器与所述单向阀和电磁阀通信连接。
24、可选地,所述可变阻尼器为磁流变阻尼器。
25、与现有技术相比,本发明具有以下优点:
26、本申请的座椅悬架半主动控制方法及控制系统,根据簧上振动加速度和簧下振动加速度计算相对振动速度和振动控制变量,根据相对振动速度、振动控制变量和座椅和人体的等效质量计算期望阻尼力,结合了传统的天棚阻尼和加速度阻尼控制算法优点,对低频段和高频段的车辆振动都有明显的效果;本申请相对主动座椅悬架,即使控制模块全部失效,也能作为被动阻尼系统,吸收座椅振动,从而确保乘坐人员的安全。
技术特征:1.一种座椅悬架半主动控制方法,所述座椅悬架包括剪式机构、与剪式机构的支撑臂连接的气囊和可变阻尼器,其特征在于,包括:
2.如权利要求1所述的座椅悬架半主动控制方法,其特征在于,根据所述簧上振动加速度和簧下振动加速度计算振动控制变量包括:
3.如权利要求2所述的座椅悬架半主动控制方法,其特征在于,所述控制系统的传递函数w为:
4.如权利要求1所述的座椅悬架半主动控制方法,其特征在于,根据所述簧上振动加速度和簧下振动加速度计算得到相对振动速度包括:
5.如权利要求4所述的座椅悬架半主动控制方法,其特征在于,还包括:
6.如权利要求4所述的座椅悬架半主动控制方法,其特征在于,根据所述相对振动速度、所述振动控制变量和所述座椅和人体的等效质量计算期望阻尼力包括:
7.如权利要求6所述的座椅悬架半主动控制方法,其特征在于,还包括:
8.如权利要求6所述的座椅悬架半主动控制方法,其特征在于,当>0时,通过如下公式计算所述期望阻尼力:
9.如权利要求1所述的座椅悬架半主动控制方法,其特征在于,通过如下公式计算座椅和人体的等效质量:
10.如权利要求1所述的座椅悬架半主动控制方法,其特征在于,调节气囊的充气量使座椅和人体调整到平衡位置包括:
11.一种座椅悬架,包括剪式机构、与剪式机构的支撑臂连接的气囊和可变阻尼器,其特征在于,还包括:
12.如权利要求11所述的座椅悬架,其特征在于,所述气囊控制模块包括气泵、单向阀、汇流板、气管、电磁阀和控制器;
13.如权利要求11所述的座椅悬架,其特征在于,所述可变阻尼器为磁流变阻尼器。
技术总结本发明提供了一种座椅悬架半主动控制方法及座椅悬架,座椅悬架包括剪式机构、与剪式机构的支撑臂连接的气囊和可变阻尼器,座椅悬架半主动控制方法包括调节气囊的充气量使座椅和人体调整到平衡位置,并将气囊设置为保压状态;获取座椅处于平衡位置时的剪式机构高度和气囊气压值,根据剪式机构高度和气囊气压值计算座椅和人体的等效质量;实时获取车辆行驶过程中的簧上振动加速度和簧下振动加速度,根据簧上振动加速度和簧下振动加速度计算相对振动速度和振动控制变量;根据相对振动速度、振动控制变量和座椅和人体的等效质量计算期望阻尼力,控制可变阻尼器输出期望阻尼力,实现座椅减振效果。技术研发人员:牛心健,郭启寅受保护的技术使用者:上海新纪元机器人有限公司技术研发日:技术公布日:2024/7/4本文地址:https://www.jishuxx.com/zhuanli/20240718/251352.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表