一种适用于陆上复杂地形行进的两栖无人小艇
- 国知局
- 2024-08-02 16:36:04
本发明涉及一种适用于陆上复杂地形行进的两栖无人小艇。
背景技术:
1、近年来,随着智能无人装备技术的迅速发展,无人小艇凭借着其优越的机动性能和极高的作业效率,成为了在海洋、湖泊和河道等水域的重要载荷作业平台。特别是在智能无人装备技术的加持下,无人小艇在测绘、勘探以及监测等科研领域中得到了广泛的应用。
2、然而,在一些崎岖偏远的作业场地里,由于受到地形限制或环境因素的影响,货车、吊机等运载设备难以运行,特别是在一些浅滩或具有落差的岸边,对于无人小艇的运输、布放和回收,目前往往是通过人力搬、抬或举的方式进行,这样的方式不仅耗时费力,同时在操作上也存在着一定的风险和安全隐患。
技术实现思路
1、本发明的目的是提供一种适用于陆上复杂地形行进的两栖无人小艇,以解决上述现有技术存在的问题。在无法使用运载设备的情况下,能够实现无人小艇在陆上复杂地形的两栖运动,便于其自身的运输、布放和回收。在兼顾机动性能好、作业效率高的同时,具有运行平稳、安全性高等特点,为相关作业人员开展科研工作提供极大的便利。
2、为实现上述目的,本发明可通过以下技术方案予以实现:
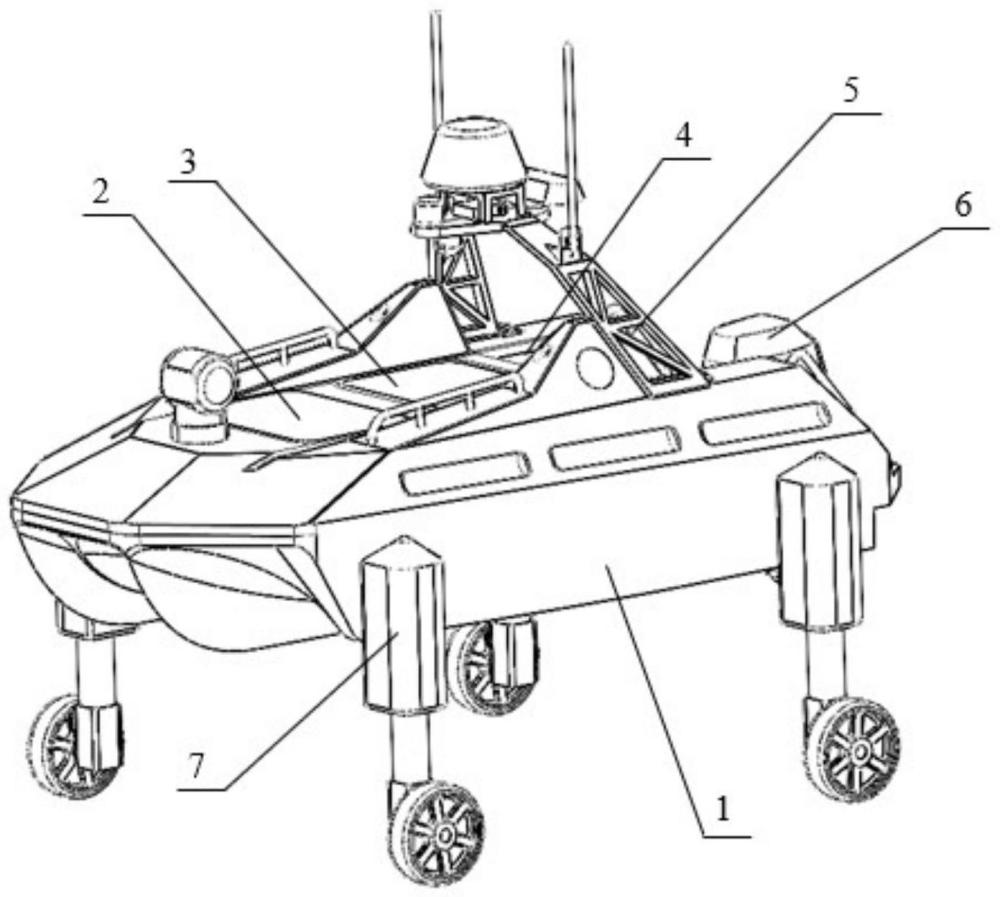
3、本发明提供一种适用于陆上复杂地形行进的两栖无人小艇,包括主艇体和两栖动力部分。所述主艇体包括艇身和艇舱,且于艇舱上部设置有呈平顶a型的艇架,以实现对无人艇正常运行作业所需设备的安装和搭载。所述两栖动力部分包括水下螺旋桨推进装置和陆上可收放轮式行进装置,以实现所述主艇体的水陆两栖运动。
4、优选地,所述主艇体的艇身结构采用多体流线型设计,底部形状向内凹陷形成多槽道空间,以实现降低主艇体在航行过程中的晃动幅度,提高所述主艇体所搭载设备运行的平稳性。
5、优选地,所述主艇体的艇舱分为前、中、后三个部分,与上部呈平顶a型艇架共同实现满足设备搭载需求,并对不同设备硬件进行区域分隔,提高空间利用效率。
6、优选地,所述两栖动力部分的水下螺旋桨推进装置包括主机、螺旋桨、电动升降机构和液压转向机构。所述水下螺旋桨推进装置设置于所述主艇体艉部,其中:通过所述主机带动所述螺旋桨旋转以产生动力;所述电动升降机构设置于所述螺旋桨与主机和所述主艇体艉部的连接处,通过舵机驱动控制所述电动升降机构绕连接处轴线转动,以实现所述水下螺旋桨推进装置的垂直角度调节,防止所述螺旋桨遭受碰撞造成损坏;所述液压转向机构设置于所述主机与螺旋桨和主艇体艉部连接处,通过电动液压泵和管道,利用液压原理控制所述螺旋桨水平角度调节,以实现所述无人小艇在水面的转向运动。
7、优选地,所述两栖运动部分的陆上可收放轮式行进装置包括液压支撑机构和驱动轮。所述液压支撑机构设置于所述主艇体两侧前端和后端,通过控制所述液压支撑机构连杆的长度和首端的旋转角度,实现对所述主艇体底部高度的调节,同时起到对所述主艇体的支撑作用;所述驱动轮固定于所述液压支撑机构杆末端,利用差速原理,通过伺服电机控制所述驱动力转动,以实现无人艇在陆地的前后和转向运动;当无人艇在航行状态时,所述液压支撑机构旋转与所述主艇体平行收起,以实现对主艇体两侧的保护作用。
8、本发明相对于现有技术取得了以下有益技术效果:
9、本发明提供的一种适用于陆上复杂地形行进的两栖无人小艇,采用合理的机电设计,通过主艇体实现对设备进行搭载,通过水下螺旋桨推进装置与陆上可收放轮式行进装置实现无人小艇的水陆两栖运动,这样的设计代替了传统人工对无人小艇的搬运、布放和回收操作,方便了科研人员在受到限制的条件下开展和执行任务,极大的提高了作业的效率和安全性。
技术特征:1.一种适用于陆上复杂地形行进的两栖无人小艇,其特征在于,包括主艇体和两栖动力部分,所述主艇体包括艇身和艇舱,且于艇舱上部设置有呈平顶a型的艇架,以实现对无人艇正常运行作业所需设备的安装和搭载;所述两栖动力部分包括水下螺旋桨推进装置和陆上可收放轮式行进装置,以实现所述主艇体的水陆两栖运动。
2.根据权利要求1所述的适用于陆上复杂地形行进的两栖无人小艇,其特征在于,所述主艇体的艇身结构采用多体流线型设计,底部形状向内凹陷形成多槽道空间,以实现降低主艇体在航行过程中的晃动幅度,提高所述主艇体所搭载设备运行的平稳性。
3.根据权利要求1所述的适用于陆上复杂地形行进的两栖无人小艇,其特征在于,所述主艇体的艇舱分为前、中、后三个部分,与上部所述呈平顶a型的艇架共同实现满足设备搭载需求,并对不同设备硬件进行区域分隔,提高空间利用效率。
4.根据权利要求1所述的适用于陆上复杂地形行进的两栖无人小艇,其特征在于,所述两栖动力部分的水下螺旋桨推进装置包括主机、螺旋桨、电动升降机构和液压转向机构;所述水下螺旋桨推进装置设置于所述主艇体艉部,其中通过所述主机带动所述螺旋桨旋转以产生动力;所述电动升降机构设置于所述螺旋桨与主机和所述主艇体艉部的连接处,通过舵机驱动控制所述电动升降机构绕连接处轴线转动,以实现所述水下螺旋桨推进装置的垂直角度调节,防止所述螺旋桨遭受碰撞造成损坏;所述液压转向机构设置于所述主机与螺旋桨和主艇体艉部连接处,通过电动液压泵和管道,利用液压原理控制所述螺旋桨水平角度调节,以实现所述无人小艇在水面的转向运动。
5.根据权利要求1所述的适用于陆上复杂地形行进的两栖无人小艇,其特征在于,所述两栖动力部分的陆上可收放轮式行进装置包括液压支撑机构和驱动轮;所述液压支撑机构设置于所述主艇体两侧前端和后端,通过控制所述液压支撑机构连杆的长度和首端的旋转角度,实现对所述主艇体底部高度的调节,同时起到对所述主艇体的支撑作用;所述驱动轮固定于所述液压支撑机构杆末端,利用差速原理,通过伺服电机控制所述驱动力转动,以实现无人艇在陆地的前后和转向运动;当无人艇在航行状态时,所述液压支撑机构旋转与所述主艇体平行收起,以实现对主艇体两侧的保护作用。
技术总结本发明公开一种适用于陆上复杂地形行进的两栖无人小艇,包括主艇体和两栖动力部分,主艇体包括艇身和艇舱,且于艇舱上部设置有呈平顶A型的艇架,以实现对无人艇正常运行作业所需设备的安装和搭载;两栖动力部分包括水下螺旋桨推进装置和陆上可收放轮式行进装置,以实现主艇体的水陆两栖运动。在无法使用运载设备的情况下,能够实现无人小艇在陆上复杂地形的两栖运动,便于其自身的运输、布放和回收,且在兼顾机动性能好、作业效率高的同时,具有运行平稳、安全性高等特点,为相关作业人员开展科研工作提供极大的便利。技术研发人员:田亚平,王佳明,吴翔,罗皓旸,祝川,李孝伟,彭艳受保护的技术使用者:上海大学技术研发日:技术公布日:2024/7/9本文地址:https://www.jishuxx.com/zhuanli/20240718/251501.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表