自主式移动机器人
- 国知局
- 2024-08-02 16:36:58
本发明涉及移动机器人,具体涉及自主式移动机器人。
背景技术:
1、现有的人力移动机器人主要存在以下几个缺点:1、劳动强度大:人力移动机器人需要依靠人力进行推、拉或举起车辆,操作人员需要投入大量的体力,对于身体素质较差的工作者来说,其运营效率会大大降低。2、效率低下:相对于其他机械化或自动化移车设备,人力移动机器人的速度相对较慢,且操作人员需要耗费更多的时间和精力,从而降低了操作效率和生产力。3、安全风险大:由于操作人员需要亲身接触汽车并进行推、拉等动作,存在一定的安全风险,如意外挤压、扭伤等伤害风险。特别是在操作过程中无法及时排除障碍物或不当操作可能导致车辆损坏甚至严重事故的发生。4、适用范围受限:人力移动机器人通常只适用于小型或轻型车辆的移动,对于大型或重型车辆,由于体力限制和操作困难,使用人力移动机器人可能面临很大的困难。
技术实现思路
1、本发明的目的在于克服现有技术的不足,提供一种自主式移动机器人。
2、为实现上述目的,本发明采用以下技术方案:
3、自主式移动机器人,包括车体、电源和中控系统,所述车体底部连接有多个麦克纳姆轮,各麦克纳姆轮分别由各自的驱动电机驱动运转;
4、所述车体的中部设有举升装置,该举升装置用于举升被转移的车辆;
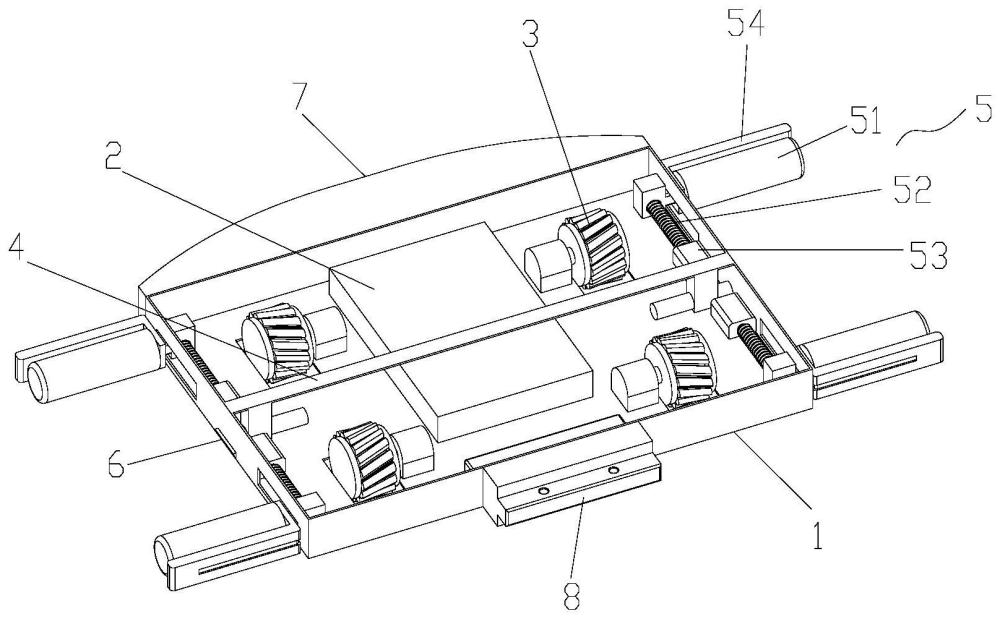
5、所述车体的两侧分别设有车轮夹紧装置,车轮夹紧装置包括两个间隔设置的夹紧轮,两夹紧轮分别由对应的丝杆传动机构带动相互靠近或相互远离,两夹紧轮相互靠近时实现夹紧车轮;
6、所述车轮夹紧装置的中间设有超声波传感器,该超声波传感器用于感测被夹紧的车轮是否被抬升;
7、所述车体的前端设有激光雷达和相机矩阵,激光雷达和相机矩阵用于感知被转移车辆所在的环境信息;
8、所述电源固定在车体的中部,电源用于给整个移动机器人提供电源;
9、所述中空系统用于控制整个移动机器人的运转。
10、进一步的,所述丝杆传动机构包括传动丝杆、夹紧电机和滑座,所述传动丝杆转动连接于车体内部,夹紧电机的输出端与传动丝杆的一端传动连接,滑座滑动连接于车体侧面对应的导向槽上,滑座的内侧端通过螺母与丝杆传动连接,所述夹紧轮转动连接在滑座的外侧端。
11、进一步的,所述车体的后端设有能够相互对接的对接装置,两个机器人的车体通过对接装置拼接成一体。
12、进一步的,所述麦克纳姆轮具有四个,四个麦克纳姆轮分别设置在车体的四个顶角处。
13、进一步的,所述电源为可充电的蓄电池。
14、进一步的,所述车体的中控系统上设有人机交互模块,通过人机交互模块可以对移动机器人进行控制。
15、采用上述的技术方案,本发明具有的有益效果为:
16、本发明采用丝杆传动机构对车轮夹紧装置直接进行控制,使其更加精确控制。使用了超声波传感器,具有非接触性、高精度、宽测量范围、反射性能好、抗干扰能力强和实时性好等优点,使其在移动时能更好的确定位置。
17、目前市面上的移动机器人普遍多为人力移动机器人,通过人力来进行对车辆的移动,忽略了不同环境对移动机器人和人员的干扰,因此本发明特意设计了一款自主式移动机器人,保证对每辆车的移动定位精确,适应不同的环境。
技术特征:1.自主式移动机器人,其特征在于:包括车体、电源和中控系统,所述车体底部连接有多个麦克纳姆轮,各麦克纳姆轮分别由各自的驱动电机驱动运转;
2.根据权利要求1所述的自主式移动机器人,其特征在于:所述丝杆传动机构包括传动丝杆、夹紧电机和滑座,所述传动丝杆转动连接于车体内部,夹紧电机的输出端与传动丝杆的一端传动连接,滑座滑动连接于车体侧面对应的导向槽上,滑座的内侧端通过螺母与丝杆传动连接,所述夹紧轮转动连接在滑座的外侧端。
3.根据权利要求1所述的自主式移动机器人,其特征在于:所述车体的后端设有能够相互对接的对接装置,两个机器人的车体通过对接装置拼接成一体。
4.根据权利要求1所述的自主式移动机器人,其特征在于:所述麦克纳姆轮具有四个,四个麦克纳姆轮分别设置在车体的四个顶角处。
5.根据权利要求1所述的自主式移动机器人,其特征在于:所述电源为可充电的蓄电池。
6.根据权利要求1所述的自主式移动机器人,其特征在于:所述车体的中控系统上设有人机交互模块,通过人机交互模块可以对移动机器人进行控制。
技术总结本发明涉及自主式移动机器人,包括车体、电源和中控系统,所述车体底部连接有多个麦克纳姆轮,各麦克纳姆轮分别由各自的驱动电机驱动运转;所述车体的中部设有举升装置,该举升装置用于举升被转移的车辆;所述车体的两侧分别设有车轮夹紧装置,车轮夹紧装置包括两个间隔设置的夹紧轮,两夹紧轮分别由对应的丝杆传动机构带动相互靠近或相互远离;所述车轮夹紧装置的中间设有超声波传感器,该超声波传感器用于感测被夹紧的车轮是否被抬升;所述车体的前端设有激光雷达和相机矩阵,激光雷达和相机矩阵用于感知被转移车辆所在的环境信息;所述中空系统用于控制整个移动机器人的运转。本发明能够保证对每辆车的移动定位精确,适应不同的环境。技术研发人员:付福成,丁志刚,李乐彦,邹复民,林娟娟,吴琪,龚杨杨,蒋静静,李赟,林名胜,张荣汀受保护的技术使用者:福建理工大学技术研发日:技术公布日:2024/7/9本文地址:https://www.jishuxx.com/zhuanli/20240718/251595.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。