电动汽车能效控制的方法、装置、车辆及存储介质与流程
- 国知局
- 2024-08-02 16:46:32
本技术涉及车辆,特别涉及一种电动汽车能效控制的方法、装置、车辆及存储介质。
背景技术:
1、电动汽车通常被看作是一种更环保的交通方式,高效的电动汽车能减少每公里行驶过程中的能源消耗,从而进一步减少对电网的负担和减少能源生产时的碳排放,因此,提高电动汽车的能效能为消费者节省更多费用,更高的能效意味着更长的行驶距离,可以减少驾驶者对于续航里程的顾虑,由于电池作为电动汽车中最昂贵的组成部分之一,提高能效可以减少对电池的需求和充放电循环,从而延长电池的使用寿命。
2、目前,相关技术(cn110266226a)通过搭建mpc(model predictive control,模型预测控制)算法框架,将预测控制问题转化为以电机直轴电流和交轴电流为变量的优化问题,以保证电动汽车拥有更好的动态性能和更低的能量损耗;此外,相关技术(cn111824117a)通过路面信息和环境信息得到最优控制soc(state of charge,汽车电池的充电状态),根据需求扭矩、最优控制的等价因子和最优控制soc计算混合动力汽车行程的最优控制输出指令,实现插电式混合动力汽车对不同路况的自适应性。
3、然而,相关技术中转化预测控制问题仅考虑车辆自身问题,导致能效控制的具有单一性,降低能效控制的准确性,并且通过电池能量优化控制仅适用于插电式混合动力系统,具有局限性,降低了整车能效,无法满足车辆能效控制的需求,亟待解决。
技术实现思路
1、本技术提供一种电动汽车能效控制的方法、装置、车辆及存储介质,以解决相关技术中转化预测控制问题仅考虑车辆自身问题,导致能效控制的具有单一性,降低能效控制的准确性,并且通过电池能量优化控制仅适用于插电式混合动力系统,具有局限性,降低了整车能效,无法满足车辆能效控制的需求的问题。
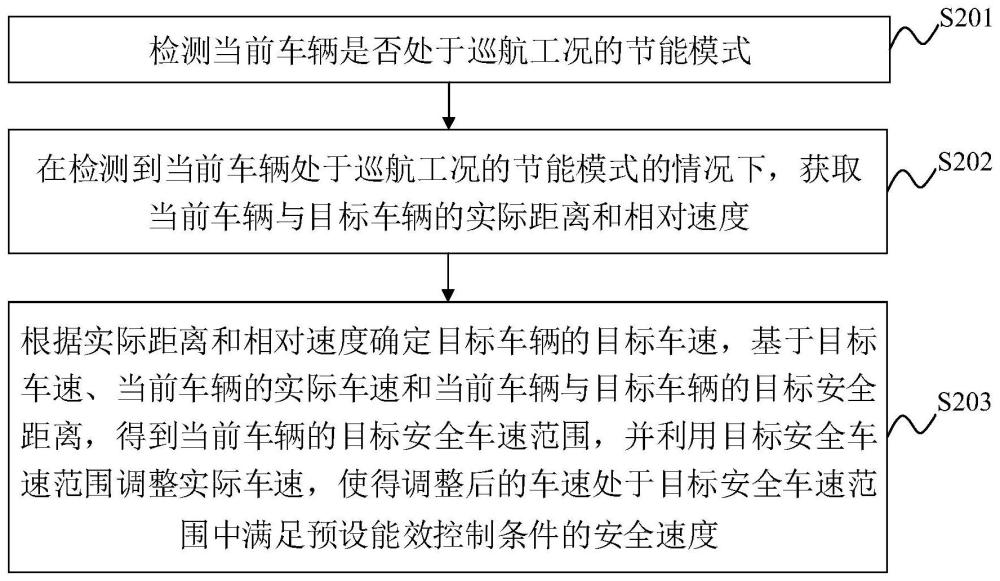
2、本技术第一方面实施例提供一种电动汽车能效控制的方法,包括以下步骤:检测当前车辆是否处于巡航工况的节能模式;在检测到所述当前车辆处于所述巡航工况的节能模式的情况下,获取所述当前车辆与目标车辆的实际距离和相对速度;根据所述实际距离和所述相对速度确定所述目标车辆的目标车速,基于所述目标车速、所述当前车辆的实际车速和所述当前车辆与所述目标车辆的目标安全距离,得到所述当前车辆的目标安全车速范围,并利用所述目标安全车速范围调整所述实际车速,使得调整后的车速处于所述目标安全车速范围中满足预设能效控制条件的安全速度。
3、根据上述技术手段,本技术实施例可以在车辆处于节能模式时,基于目标车辆的目标车速、当前车辆的实际车速和当前车辆与目标车辆的目标安全距离,得到当前车辆的目标安全车速范围,并利用目标安全车速范围调整实际车速,使得调整后的车速满足一定的能效控制条件的安全速度,有效的提升了整车能效,并且提升了车辆的续航里程。
4、可选地,在本技术的一个实施例中,所述基于所述目标车速、所述当前车辆的实际车速和所述当前车辆与所述目标车辆的目标安全距离,得到所述当前车辆的目标安全车速范围,包括:基于所述实际车速、所述当前车辆的目标制动时间和目标缓冲距离,得到所述当前车辆与所述目标车辆的目标安全距离;利用所述目标车速、所述实际车速和所述目标安全距离得到所述当前车辆的目标安全车速范围。
5、根据上述技术手段,本技术实施例可以利用目标车辆的车速、当前车辆的实际车速和目标安全距离得到当前车辆的目标安全车速范围,有效的提升了车辆能效控制的可执行性。
6、可选地,在本技术的一个实施例中,所述利用所述目标安全车速范围调整所述实际车速,包括:判断所述实际距离是否大于或等于所述目标安全距离;若所述实际距离大于或等于所述目标安全距离,则将所述实际车速转换为对应的电驱转速和扭矩,基于预先设置的电驱效率地图,得到所述电驱转速和扭矩的最高效率工况点,利用所述最高效率工况点对应的车速调整所述实际车速;若所述实际距离小于所述目标安全距离,则将所述实际车速调整至所述目标安全车速范围中的目标安全车速。
7、根据上述技术手段,本技术实施例可以在实际距离大于或等于目标安全距离时,根据当前车辆的实际车速确定安全车速范围内的电驱效率地图的高效区,从而确定最高效率工况点,利用最高效率工况点对应的车速调整实际车速,还可以在实际距离小于目标安全距离时,将实际车速调整至目标安全车速范围内的车速行驶,有效的提升了整车能效,满足用户的驾乘体验。
8、可选地,在本技术的一个实施例中,在调整后的车速处于所述目标安全车速范围中满足预设能效控制条件的安全速度之后,还包括:判断所述调整后的车速是否需要更新;若所述调整后的车速需要更新,则获取新的最高效率工况点,利用所述新的最高效率工况点确定新的安全车速,以控制所述当前车辆根据所述新的安全车速行驶,否则控制所述当前车辆根据所述调整后的车速行驶。
9、根据上述技术手段,本技术实施例可以在当前车辆的车速需要调整时,获取新的最高效率工况点,利用所述新的最高效率工况点确定新的安全车速,从而控制当前车辆根据新的安全车速行驶,有效的提升了车辆的安全性和智能性。
10、可选地,在本技术的一个实施例中,所述控制所述当前车辆根据所述新的安全车速行驶,包括:判断是否接收到用户的车速更新指令;若接收到所述车速更新指令,则响应所述车速更新指令,并根据所述车速更新指令控制所述当前车辆根据所述新的安全车速行驶,否则不控制所述当前车辆根据所述新的安全车速行驶。
11、根据上述技术手段,本技术实施例可以通过用户自主控制是否更新当前车辆的实际车速,有效的提升了车辆的交互性和智能性。
12、本技术第二方面实施例提供一种电动汽车能效控制的装置,包括:检测模块,用于检测当前车辆是否处于巡航工况的节能模式;获取模块,用于在检测到所述当前车辆处于所述巡航工况的节能模式的情况下,获取所述当前车辆与目标车辆的实际距离和相对速度;处理模块,用于根据所述实际距离和所述相对速度确定所述目标车辆的目标车速,基于所述目标车速、所述当前车辆的实际车速和所述当前车辆与所述目标车辆的目标安全距离,得到所述当前车辆的目标安全车速范围,并利用所述目标安全车速范围调整所述实际车速,使得调整后的车速处于所述目标安全车速范围中满足预设能效控制条件的安全速度。
13、可选地,在本技术的一个实施例中,所述处理模块包括:第一确定单元,用于基于所述实际车速、所述当前车辆的目标制动时间和目标缓冲距离,得到所述当前车辆与所述目标车辆的目标安全距离;第二确定单元,用于利用所述目标车速、所述实际车速和所述目标安全距离得到所述当前车辆的目标安全车速范围。
14、可选地,在本技术的一个实施例中,所述处理模块包括:第一判断单元,用于判断所述实际距离是否大于或等于所述目标安全距离;第一处理单元,用于若所述实际距离大于或等于所述目标安全距离,则将所述实际车速转换为对应的电驱转速和扭矩,基于预先设置的电驱效率地图,得到所述电驱转速和扭矩的最高效率工况点,利用所述最高效率工况点对应的车速调整所述实际车速;第二处理单元,用于若所述实际距离小于所述目标安全距离,则将所述实际车速调整至所述目标安全车速范围中的目标安全车速。
15、可选地,在本技术的一个实施例中,本技术实施例的装置还包括:判断模块,用于判断所述调整后的车速是否需要更新;处理模块,用于若所述调整后的车速需要更新,则获取新的最高效率工况点,利用所述新的最高效率工况点确定新的安全车速,以控制所述当前车辆根据所述新的安全车速行驶,否则控制所述当前车辆根据所述调整后的车速行驶。
16、可选地,在本技术的一个实施例中,所述处理模块包括:第二判断单元,用于判断是否接收到用户的车速更新指令;第三处理单元,用于若接收到所述车速更新指令,则响应所述车速更新指令,并根据所述车速更新指令控制所述当前车辆根据所述新的安全车速行驶,否则不控制所述当前车辆根据所述新的安全车速行驶。
17、本技术第三方面实施例提供一种车辆,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序,以实现如上述实施例所述的电动汽车能效控制的方法。
18、本技术第四方面实施例提供一种计算机可读存储介质,所述计算机可读存储介质存储计算机程序,该程序被处理器执行时实现如上的电动汽车能效控制的方法。
19、本技术第五方面实施例提供一种计算机程序,所述计算机程序被执行时,以用于实现如上的电动汽车能效控制的方法。
20、本技术的有益效果:
21、(1)本技术实施例可以在车辆处于节能模式时,基于目标车辆的目标车速、当前车辆的实际车速和当前车辆与目标车辆的目标安全距离,得到当前车辆的目标安全车速范围,并利用目标安全车速范围调整实际车速,使得调整后的车速满足一定的能效控制条件的安全速度,有效的提升了整车能效,并且提升了车辆的续航里程。
22、(2)本技术实施例可以在实际距离大于或等于目标安全距离时,根据当前车辆的实际车速确定安全车速范围内的电驱效率地图的高效区,从而确定最高效率工况点,利用最高效率工况点对应的车速调整实际车速,还可以在实际距离小于目标安全距离时,将实际车速调整至目标安全车速范围内的车速行驶,有效的提升了整车能效,满足用户的驾乘体验。
23、本技术附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
本文地址:https://www.jishuxx.com/zhuanli/20240718/252430.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表