一种决策的方法以及相关装置与流程
- 国知局
- 2024-08-02 16:48:50
本技术涉及智能车领域,并且更具体地,涉及一种决策的方法以及相关装置。
背景技术:
1、随着自动驾驶技术的日益成熟,该项技术逐渐普遍应用于智能车中,辅助或者接管驾驶员控制车辆行驶。但是,在控制车辆行驶过程中,难免会遇到一些特殊路况,例如,前方道路施工、前方道路发生交通事故等。在这些情况下,通常使用交通锥来警示接近施工现场或者事故现场的车辆,示意车辆绕行,以避免发生意外。这需要自动驾驶系统准确进行场景识别,并作出驾驶策略,以规划换道或避障等。
2、由于实际道路状况是复杂的,而且自动驾驶系统的感知能力有限,难以保证上述驾驶策略的安全性和鲁棒性。
3、因此,如何保证自动驾驶系统确定的驾驶策略安全性高、鲁棒性强,是亟需解决的问题。
技术实现思路
1、本技术实施例提供一种决策的方法以及相关装置,通过确定第一车道上摆放的临时交通控制装置(temporary traffic control device,ttcd)的分布状态,进而确定车辆的驾驶策略。该方法能够保证自动驾驶系统确定的驾驶策略安全性高、鲁棒性强,即能够更为准确合理地制定驾驶策略,以规划车辆绕障,或者变道,或者刹停。
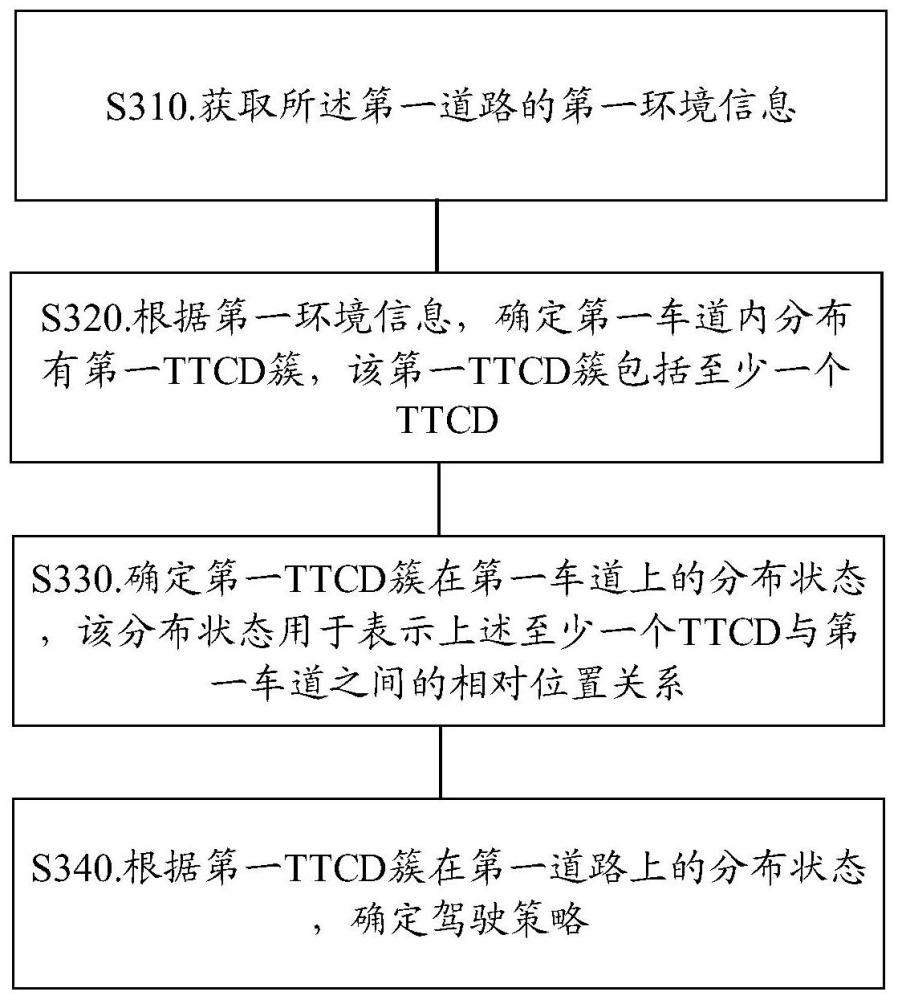
2、第一方面,提供了一种决策的方法,该方法包括:获取第一车道的第一环境信息,车辆行驶于第一车道;根据第一环境信息,确定第一车道内分布有第一ttcd簇,该第一ttcd簇包括至少一个ttcd;确定第一ttcd簇在第一车道上的分布状态,该分布状态用于表示上述至少一个ttcd与第一车道之间的相对位置关系;根据上述第一ttcd簇在第一车道上的分布状态,确定驾驶策略。
3、示例地,上述ttcd可以是一种交通锥、交通筒、交通柱、交通水马等。
4、示例地,上述第一环境信息可以是上述实施例提出的车辆周围的环境信息,可以通过车载的传感器来获取。
5、示例地,上述驾驶策略可以包括:绕障,或者变道,或者刹停。
6、基于上述技术方案,根据第一ttcd簇在第一车道上的分布状态,能够更为准确合理地确定驾驶策略,以规划车辆绕障,或者变道,或者刹停,增加了决策的安全性。
7、结合第一方面,在第一方面的某些实现方式中,当第一ttcd簇在第一车道上的分布状态为第一状态时,确定驾驶策略为第一策略,该第一策略为控制车辆以第一速度绕过第一ttcd簇。
8、示例地,上述第一速度要小于车辆当前的行驶速度。从而使车辆在第一车道内绕过第一ttcd簇的过程中能够提前减速,以避免第一ttcd簇的分布状态或者第一车道内的道路环境发生突变,造成车辆躲避不及而发生碰撞。
9、基于上述技术方案,使车辆能够在传感器探测范围有限的条件下,在绕过第一ttcd簇的过程中,提前对车辆进行限速,有助于车辆避免因第一ttcd簇分布状况发生突变躲避不及而造成碰撞的情况,增加了决策的安全性的同时,还增加了决策的鲁棒性。
10、结合第一方面,在第一方面的某些实现方式中,上述第一状态包括:第一ttcd簇的第一边缘线与第一车道的道路中心线之间的最小距离大于或者等于第一阈值,第一边缘线为第一ttcd簇的沿着第一车道方向延伸的边缘线。
11、示例地,可以基于当前道路包括的车道数量,推断出第一车道的类别,进而确定第一车道的宽度,然后实时调整上述第一阈值。例如,已知双向四车道是2×7.5m,此时第一车道的宽度为3.25m,对应的第一阈值可以是0.5m;双向六车道是2×11.25m,此时第一车道的宽度为3.75m,对应的第一阈值可以是0.6m;双向八车道是2×15m,此时第一车道的宽度为3.75m,对应的第一阈值可以是0.6m。
12、示例地,在上述示例基础上,上述第一阈值还可以结合自车宽度来确定。
13、基于上述技术方案,通过合理地定义上述第一状态,保障了车辆能够安全地在第一车道内绕过第一ttcd簇,从而增加了车辆执行第一策略的可行性,也提升了决策的安全性和鲁棒性。
14、结合第一方面,在第一方面的某些实现方式中,在确定驾驶策略为第一策略之前,根据第一状态,确定第二环境信息,该第二环境信息包括以下至少一种:第一ttcd簇的第一边缘线的长度,第一ttcd簇的第一边缘线与第一车道的道路中心线之间的夹角,车辆与第一ttcd簇之间的最小距离;根据上述第二环境信息,确定上述第一速度。
15、示例地,上述第一边缘线越长,上述第一速度越低;上述第一边缘线与第一车道的道路中心线之间的夹角越大,上述第一速度越低;上述车辆与第一ttcd簇之间的最小距离越小,上述第一速度越低。
16、基于上述技术方案,通过获取的第二环境信息能够合理控制车辆绕过第一ttcd簇时的车速,以避免车辆在绕障的过程中车速过快,增加了决策的安全性和鲁棒性。
17、结合第一方面,在第一方面的某些实现方式中,当第一ttcd簇在第一车道上的分布状态为第二状态时,确定第一车道的相邻车道的第三环境信息;根据该第三环境信息,确定相邻车道的道路条件;根据相邻车道的道路条件,确定上述驾驶策略为第二策略或者第三策略。
18、示例地,上述第二状态为除了上述第一状态之外的所有状态。即在第二状态下,表示当前车辆无法在第一车道内绕过第一ttcd簇。
19、基于上述技术方案,考虑到车辆无法在第一车道内绕过第一ttcd簇的情况,通过获取相邻车道的道路条件,确定除车道内绕障之外的驾驶策略。增加了决策的灵活性以及安全性。
20、结合第一方面,在第一方面的某些实现方式中,上述第二状态包括:第一ttcd簇的第一边缘线与第一车道的道路中心线之间最小距离小于第一阈值。
21、基于上述技术方案,通过合理地定义上述第二状态,保障了车辆能够避免与第一ttcd簇发生碰撞,从而增加了决策的安全性。
22、结合第一方面,在第一方面的某些实现方式中,当上述相邻车道的道路条件满足第一换道条件时,确定驾驶策略为第二策略,第二策略为控制车辆切换至相邻车道行驶;当上述相邻车道的道路条件不满足第一换道条件时,确定驾驶策略为第三策略,第三策略为控制车辆在第一车道内刹停。
23、示例地,可以通过交通标志识别tsr(traffic sign recognition)系统的识别结果,以及车辆搭载的传感器采集的相邻车道的路况信息,以及对应信息的置信度,综合判断上述相邻车道的道路条件是否满足第一换道条件。
24、基于上述技术方案,通过充分采集第一车道与相邻车道的环境信息,从而保障车辆决策的安全性与合理性,避免车辆在不具备换道条件的时候进行换道,引入安全隐患。
25、结合第一方面,在第一方面的某些实现方式中,上述第一换道条件包括:允许车辆在第一车道与相邻车道之间变道,相邻车道前方未被占用,相邻车道的侧后方无其他车辆行驶。
26、示例地,上述相邻车道的道路条件满足第一换道条件,表示满足第一换道条件包括的所有上述条件。若不满足第一换道条件中的任一个条件,都表示上述相邻车道的道路条件不满足第一换道条件。
27、基于上述技术方案,通过充分获取相邻车道前方或者后方交通状况,也考虑到了当前道路的交规因素,以此确定车辆是否能够合理安全地进行换道,以躲避第一ttcd簇,避免车辆在不具备换道条件的时候进行换道,引入安全隐患,进一步增加了驾驶策略的安全性。
28、结合第一方面,在第一方面的某些实现方式中,在上述驾驶策略为第三策略时,基于第一ttcd簇中的第一ttcd与车辆之间的位置关系,确定车辆的刹停策略,第一ttcd为第一ttcd簇中的距离车辆最近的ttcd。
29、示例地,可以通过确定车辆的预期制动距离,进而确定控制车辆的刹停操作。该制动距离可以小于车辆与第一ttcd的距离。
30、基于上述技术方案,使车辆采取第三策略时,能够尽早进行制动,以减小车辆在制动过程中的碰撞风险,并且使决策更具备类人性,提升用户的驾乘体验。
31、结合第一方面,在第一方面的某些实现方式中,上述第一ttcd簇在第一车道上的分布状态是基于聚类拟合的方式识别出来的。
32、示例地,上述聚类算法可以是k均值(k-means)算法,或者层次聚类算法,或者自组织映射(self-organizing feature map,som)聚类算法。
33、基于上述技术方案,能够准确地识别出第一ttcd簇在第一车道上的分布状态,保障了决策的可靠性和准确性。
34、第二方面,提供了一种用于决策的装置,该装置包括:获取单元,用于获取第一车道的第一环境信息,车辆行驶于第一车道;确定单元,用于根据第一环境信息,确定第一车道内分布有第一ttcd簇,该第一ttcd簇包括至少一个ttcd;用于确定第一ttcd簇在第一车道上的分布状态,该分布状态用于表示上述至少一个ttcd与第一车道之间的相对位置关系;用于根据第一ttcd簇在第一车道上的分布状态,确定驾驶策略。
35、基于上述技术方案,根据第一ttcd簇在第一车道上的分布状态,能够更为准确合理地确定驾驶策略,以规划车辆绕障,或者变道,或者刹停。
36、结合第二方面,在第二方面的某些实现方式中,上述确定单元具体用于:当第一ttcd簇在第一车道上的分布状态为第一状态时,确定驾驶策略为第一策略,第一策略为控制车辆以第一速度绕过第一ttcd簇。
37、基于上述技术方案,使车辆能够在传感器探测范围有限的条件下,在绕过第一ttcd簇的过程中,提前对车辆进行限速,有助于车辆避免因第一ttcd簇分布状况发生突变躲避不及而造成碰撞的情况。
38、结合第二方面,在第二方面的某些实现方式中,上述第一状态包括:第一ttcd簇的第一边缘线与第一车道的道路中心线之间的最小距离大于或者等于第一阈值,第一边缘线为第一ttcd簇的沿着第一车道方向延伸的边缘线。
39、基于上述技术方案,通过合理地定义上述第一状态,保障了车辆能够安全地在第一车道内绕过第一ttcd簇,从而增加了车辆执行第一策略的可行性,也提升了决策的安全性和鲁棒性。
40、结合第二方面,在第二方面的某些实现方式中,在确定驾驶策略为第一策略之前,上述确定单元还用于:根据第一状态,确定第二环境信息,第二环境信息包括以下至少一种:第一ttcd簇的第一边缘线的长度,第一ttcd簇的第一边缘线与第一车道的道路中心线之间的夹角,车辆与第一ttcd簇之间的最小距离;根据第二环境信息,确定第一速度。
41、基于上述技术方案,通过获取的第二环境信息能够合理控制车辆绕过第一ttcd簇时的车速,以避免车辆在绕障的过程中车速过快,增加了决策的安全性和鲁棒性。
42、结合第二方面,在第二方面的某些实现方式中,上述确定单元具体用于:当第一ttcd簇在第一车道上的分布状态为第二状态时,确定第一车道的相邻车道的第三环境信息;根据第三环境信息,确定相邻车道的道路条件;根据相邻车道的道路条件,确定驾驶策略为第二策略或者第三策略。
43、基于上述技术方案,考虑到车辆无法在第一车道内绕过第一ttcd簇的情况,通过获取相邻车道的道路条件,确定除车道内绕障之外的驾驶策略。增加了决策的灵活性以及安全性。
44、结合第二方面,在第二方面的某些实现方式中,上述第二状态包括:第一ttcd簇的第一边缘线与第一车道的道路中心线之间最小距离小于第一阈值。
45、基于上述技术方案,通过合理地定义上述第二状态,保障了车辆能够避免与第一ttcd簇发生碰撞,从而增加了决策的安全性。
46、结合第二方面,在第二方面的某些实现方式中,上述确定单元具体用于:当相邻车道的道路条件满足第一换道条件时,确定驾驶策略为第二策略,第二策略为控制车辆切换至相邻车道行驶;当相邻车道的道路条件不满足第一换道条件时,确定驾驶策略为第三策略,第三策略为控制车辆在第一车道内刹停。
47、基于上述技术方案,通过充分采集第一车道与相邻车道的环境信息,从而保障车辆决策的安全性与合理性,避免车辆在不具备换道条件的时候进行换道,引入安全隐患。
48、结合第二方面,在第二方面的某些实现方式中,上述第一换道条件包括:允许车辆在第一车道与相邻车道之间变道,相邻车道前方未被占用,相邻车道的侧后方无其他车辆行驶。
49、基于上述技术方案,通过充分获取相邻车道前方或者后方交通状况,也考虑到了当前道路的交规因素,以此确定车辆是否能够合理安全地进行换道,以躲避第一ttcd簇,避免车辆在不具备换道条件的时候进行换道,引入安全隐患,进一步增加了驾驶策略的安全性。
50、结合第二方面,在第二方面的某些实现方式中,在驾驶策略为第三策略时,上述确定单元还用于:基于第一ttcd簇中的第一ttcd与车辆之间的位置关系,确定车辆的刹停策略,第一ttcd为第一ttcd簇中的距离车辆最近的ttcd。
51、基于上述技术方案,使车辆采取第三策略时,能够尽早进行制动,以减小车辆在制动过程中的碰撞风险,并且使决策更具备类人性,提升用户的驾乘体验。
52、结合第二方面,在第二方面的某些实现方式中,上述第一ttcd簇在第一车道上的分布状态是基于聚类拟合的方式识别出来的。
53、基于上述技术方案,能够准确地识别出第一ttcd簇在第一车道上的分布状态,保障了决策的可靠性和准确性。
54、第三方面,提供了一种用于决策的装置,包括处理器和存储器,其中,处理器和存储器相连,其中,存储器用于存储程序代码,处理器用于调用程序代码,以执行上述第一方面的方法设计中任意一种可能的实现方式中的方法。
55、第四方面,提供了一种芯片系统,芯片系统应用于电子设备;芯片系统包括一个或多个接口电路,以及一个或多个处理器;接口电路和处理器通过线路互联;接口电路用于从电子设备的存储器接收信号,并向处理器发送信号,信号包括存储器中存储的计算机指令;当处理器执行计算机指令时,电子设备执行上述第一方面的方法设计中任意一种可能的实现方式中的方法。
56、第五方面,提供了一种计算机可读存储介质,存储有计算机程序或指令,该计算机程序或指令用于实现第一方面的方法设计中任意一种可能的实现方式中的方法。
57、第六方面,提供了一种计算机程序产品,该计算机程序代码或指令在计算机上执行时,使得计算机执行上述第一方面的方法设计中任意一种可能的实现方式中的方法。
58、第七方面,提供了一种车辆,该车辆包括如第二方面或第三方面中任一种可能实现方式中的装置。
本文地址:https://www.jishuxx.com/zhuanli/20240718/252615.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表