用于停止当前行进方向上不期望的继续的方法与流程
- 国知局
- 2024-08-02 16:57:25
本发明涉及一种用于停止作业机械在当前行进方向上的不期望的继续的方法。本发明还涉及被设计成执行这种方法的控制器。本发明还涉及具有这种控制器的驱动组以及具有这种驱动组的作业机械。
背景技术:
1、用于控制车辆的驾驶行为的方法在现有技术中是已知的。可以主动诱导驾驶行为,例如主动制动。可替代地,可以防止驾驶行为,例如变道。
技术实现思路
1、在第一方面,本发明涉及一种用于停止作业机械在当前行进方向上的不期望的继续的方法。作业机械可以是农业机械、建筑机械、运输机械或越野车辆。作业机械具有用于推进作业机械的电机。电机可以从能量存储器(例如电池,诸如锂离子电池)供应电能,以便推进作业机械。除了用于推进的电机之外,作业机械还可以具有其它机械,诸如例如用于提升桅杆的其它电机。作业机械还可以具有控制器,该控制器可以被设计成执行用于停止作业机械在当前行进方向上的不期望的继续的方法。电机可以具有逆变器,例如低压逆变器。在当前行进方向上的不期望的继续可以是违背作业机械驾驶员意愿的在当前行进方向上的继续。停止在当前行进方向上的不期望的继续可以包括防止在当前行进方向上的进一步继续。
2、该方法包括从作业机械的驾驶员检测期望行进方向。在此过程中,可以检测与行进方向开关的位置有关的信息并将其发送至执行该方法的控制器。检测期望行进方向可以包括接收与行进方向开关的位置相关的信息。检测期望行进方向可以包括取决于接收到的与行进方向开关的位置相关的信息来确定期望行进方向。期望行进方向可以是例如向前、向后或中立。与行进方向开关的位置相关的信息可以通过can或flexray等总线系统来检测。
3、该方法进一步包括检测与作业机械的实际行进方向相关的作业机械的状态变量。与作业机械的实际行进方向相关的状态变量可以是例如作业机械的车轮或履带的旋转速度。转速可以是负值、零值或正值。根据转速的符号,作业机械的实际行进方向可以是例如向前、向后或中立,其中中立可以意味着作业机械不运动并且处于静止状态。检测状态变量可以包括接收与状态变量有关的信息。
4、该方法进一步包括基于所检测到的期望行进方向和所检测到的状态变量来确定电机是否处于安全临界状态。例如,当期望行进方向与状态变量相关的实际行进方向不同时,电机处于安全临界状态。例如,驾驶员可能希望向前行驶,而状态变量可能指示例如实际行进方向是向后的。
5、如果已经确定电机处于安全临界状态,则该方法还包括向电机发送信号以将电机转换成不适合推进的状态。用于执行该方法的控制器可以电连接到电机和逆变器。因此可以向逆变器以及可替代地或附加地向电机发送信号以将电机转换成不适合推进的状态。在此过程中,可以从执行该方法的控制器向电机或逆变器发送安全状态查询。不适合推进的状态可以是电机的安全状态。在不适合推进的状态下,可以使电机不能施加任何驱动力来推进作业机械。
6、因此,所公开的方法可以用于防范和停止在当前行进方向上的继续。例如,在控制器中存在硬件故障或软件错误并且这触发了在当前行进方向上的不期望的继续的情况下,可以通过控制单元来使用这样的方法并且通过执行该方法来停止在当前行进方向上的不期望的继续。
7、根据另一实施例,该方法的特征在于,检测与实际行进方向相关的状态变量包括检测电机的马达旋转方向。例如,这可以通过电机上的传感器来检测。可替代地或附加地,可以经由逆变器处以及可替代地或附加地电机处的电流和电压测量来检测马达旋转方向。所检测到的马达旋转方向可以从逆变器或从电机发送到执行该方法的控制器,并且检测状态变量可以包括接收信号形式的信息。该方法的特征还在于,检测状态变量包括基于所检测到的马达旋转方向来确定实际行进方向。实际行进方向可以取决于马达旋转方向通过预定的齿轮比来确定。例如,当马达旋转方向为第一方向时,实际行进方向可以是向前。当马达旋转方向是与第一方向相反的第二方向时,实际行进方向可以是向后。如果马达旋转方向为零,则实际行进方向可以为中立,并且作业机械可以处于停止状态。该方法的特征还在于,当所确定的实际行进方向不同于所检测到的期望行进方向时,确定安全临界状态。例如,实际行进方向可以指向第一行进方向,例如向前,而期望行进方向可以指向与第一行进方向相反的第二行进方向,例如向后。可替代地,期望行进方向可以是中立的并且不同于实际行进方向,例如向前或向后。
8、因此,公开了一种方法,该方法可以通过与马达旋转方向相关的信息来确定实际行进方向,并且可以通过所确定的实际行进方向来确定安全临界状态。因此可以向电机发送信号,以基于易于测量的电机的状态变量(即,马达旋转方向)来将电机转换成不适合推进的状态。所确定的实际行进方向不同于所检测到的期望行进方向的事实可以是下面描述的进一步实施例的先决条件。因为所确定的实际行进方向不同于所检测到的期望行进方向,所以作业机械的在当前行进方向上的继续可能是不期望的继续。
9、根据另一实施例,该方法的特征在于,检测与实际行进方向相关的状态变量包括检测电机的马达速度。检测电机的马达速度可以包括从逆变器并且可替代地或附加地从电机接收包括与电机的马达速度有关的信息的信号。马达速度可以通过电机上的传感器来检测。可替代地或附加地,可以通过电流和电压测量来确定马达速度。检测马达速度还可以包括检测马达旋转方向。因此,可以基于所检测到的马达速度来确定实际行进方向。该方法的特征还在于,当所检测到的马达速度处于与作业机械的静止相对应的马达速度周围的参数范围之外时,确定安全临界状态。例如,与作业机械的静止相对应的马达速度可以为零。参数范围可以包括正马达速度和负马达速度两者,其中参数范围例如围绕零的马达速度对称地设置。
10、利用所公开的方法,当马达速度处于与作业机械的静止相对应的马达速度周围的范围之外时,可以确定安全临界状态。因此,可以在与参数范围之外的马达速度相对应的行进速度处提供用于停止当前行进方向上的不期望的继续的方法的功能。因此可以仅在大于最小速度的行进速度下执行该方法。因此,可以仅在最小速度而非在更低速度时停止在当前行进方向上的不期望的继续。
11、根据另一实施例,该方法的特征在于,可以基于所检测到的马达速度来确定马达速度的梯度。在这种情况下,控制器可以设计成确定马达速度的梯度。该方法的特征还在于,当所确定的马达速度梯度小于最小梯度时,确定安全临界状态。为此,可以将所确定的梯度与最小梯度进行比较。最小梯度可以是预定的最小梯度并且被存储在控制器上。最小梯度可以在控制器编码期间参数化。梯度的确定和取决于所确定的梯度的安全临界状态的确定也可以独立于参数范围和所检测到的马达速度。
12、通过确定马达速度的梯度并将其与最小梯度进行比较,可以确立作业机械的实际运动的变化。因此可以确立作业机械是否仍在前进并且因此可能在当前行进方向上存在不期望的继续。因此,当马达速度的梯度小于最小梯度时,例如当马达速度不随时间显著变化时,可以确定安全临界状态,因为作业机械在当前行进方向上继续或至少并没有显著减速。如果马达速度减小但不充分,即,例如当梯度小于最小梯度时,在这种情况下,该方法也可以通过确定安全临界状态来停止在当前行进方向上的不期望的继续。
13、根据另一实施例,该方法的特征在于,检测与电机的操作模式相关的信息。在这种情况下,检测可以包括从逆变器并且可替代地或附加地从电机接收与操作模式有关的信息。操作模式可以包括与由电机提供的用于推进作业机械的扭矩相关的信息。例如,操作模式可以是发电机操作、马达操作和无扭矩操作中的一者。在发电机操作期间,电机可以作为发电机操作,并且可以存在负扭矩,其中扭矩例如经由动力系传递到电机。在马达操作期间,可以存在正扭矩,并且电机可以设计成在马达操作期间提供用于推进作业机械的扭矩。在无扭矩操作期间,从电机传递的扭矩或传递到电机的扭矩可以低于一个或多个阈值扭矩。该方法的特征还在于,当电机处于马达操作时确定安全临界状态。因此,例如当电机处于发电机操作或无扭矩操作时,不能确定安全临界状态。因此,当扭矩从电机主动传递以用于推进作业机械时,可以确定安全临界状态。当电机保持在马达操作中,即,在马达操作中持续特定时间段时,可以确定安全临界状态。
14、该方法因此可以考虑电机的操作模式。在这种情况下,可以考虑作业机械是主动驱动还是仅仅滑行。在滑行期间,例如可以存在电机的无扭矩状态,并且在这种情况下例如不能确定安全临界状态。结果,例如可以提高该方法对于不必要的停机的鲁棒性。此外,低压逆变器可以与能够执行该方法的控制器结合使用。对于这种低压逆变器,有时无法获得与电机处的当前或过去扭矩相关的准确信息。可能只有与扭矩是否高于或低于特定阈值扭矩有关的信息可用。例如,该信息可以以操作模式的形式发送到控制器以执行该方法。结合上述实施例,当梯度小于最小梯度时或者当电机处于马达操作时,可以确定安全临界状态。即使仅满足这两个条件之一,也可以确定安全临界状态。如果同时满足这两个条件,也可以确定安全临界状态。
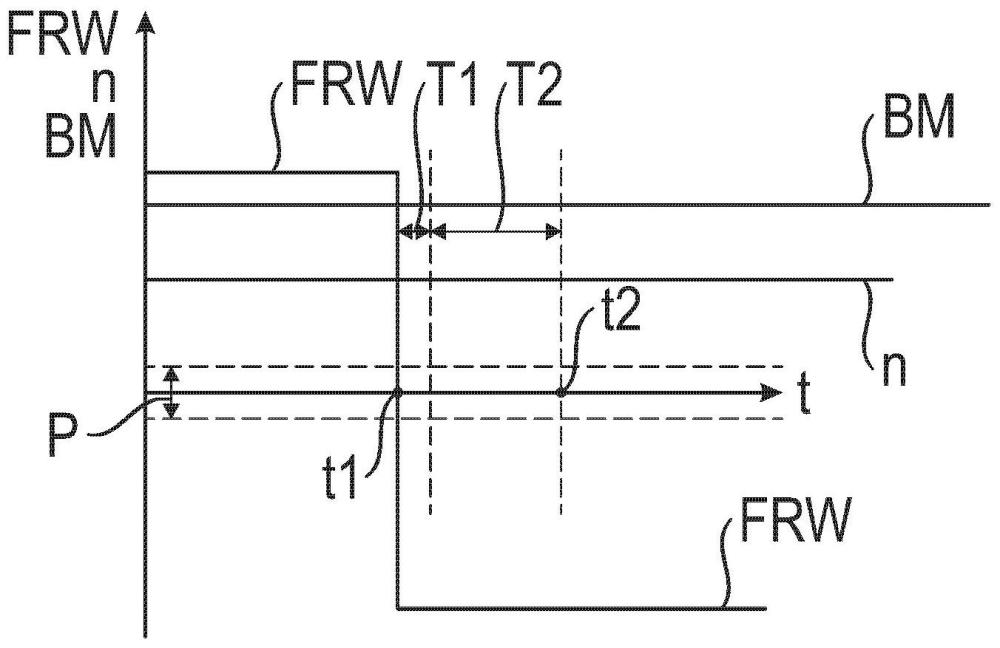
15、根据另一实施例,该方法的特征在于,当安全临界状态存在容错时间的持续时间时,确定安全临界状态。容错时间可以是例如几毫秒、百分之几秒或十分之几秒、或者几秒。容错时间可以是可参数化的,并且可替代地或附加地能够在可执行该方法的控制器上编码。例如,当电机的操作模式在容错时间的持续时间内处于马达操作并且期望行进方向与实际行进方向不同时,可以确定安全临界状态。这可以包括实际行进方向是向前而期望行进方向是中立或向后的情况。另外,它可以包括实际行进方向是向后的而期望行进方向是中立或向前的情况。可替代地,可以监测马达速度以了解马达操作情况。与操作模式无关,当马达速度梯度在容错时间的持续时间上小于最小梯度时,可以确定安全临界状态。在至少一些或所有上述情况下,只要实际行进方向与期望行进方向不同,容错时间就可以开始。
16、容错时间的提供意味着可以使该方法对于不期望的不必要的停机更加鲁棒。因此,当用于确定安全临界状态的条件存在的时间短于容错时间的持续时间时,不能确定安全临界状态。例如,如果期望行进方向与实际行进方向的不同仅持续短于容错时间的短时间,则可以避免确定安全临界状态。当操作模式保持在马达操作并且马达速度的梯度小于最小梯度时,也会发生这种情况。然后,不向电机发送信号以将电机转换成不适合推进的状态。例如,当在执行该方法的控制器的行进方向开关处存在短暂的信号错误时,可能会发生这种情况。
17、根据另一实施例,该方法的特征在于,基于所检测到的期望行进方向和所检测到的状态变量来确定换向请求。例如,当期望行进方向从向前改变成向后并且实际行进方向保持向前时,可以确定换向请求。可替代地,当期望行进方向从向后改变成向前并且实际行进方向保持向后时,可以确定换向请求。例如,当期望行进方向从向前或向后改变到中立时,不能确定换向请求。此外,如果已经确定存在换向请求,则当安全临界状态存在去抖时间时,可以确定安全临界状态。如果不存在换向请求,则即使安全临界状态存在的时间短于去抖时间,也可以确定安全临界状态。去抖时间和容错时间可以相加。因此,当存在换向请求时,当安全临界状态至少在容错时间的持续时间以及附加的去抖时间的持续时间内存在时,可以确定安全临界状态。如果没有换向请求,则当安全临界状态至少在容错时间的持续时间内存在时,可以确定安全临界状态。
18、在换向请求的情况下,该方法因此可以考虑作业机械的惯性。对于换向请求,可能需要额外的时间,即去抖时间。在换向请求的情况下提供该去抖时间意味着通过给予该方法额外的时间(去抖时间)来确定相比之下在换向请求的情况下的安全临界状态,可以使该方法更加鲁棒。与没有换向请求时的情况相同。与此相反,该方法可以在没有换向请求时更快地确定存在安全临界状态。
19、本发明的第二方面涉及一种控制器,所述控制器被设计成执行根据本发明第一方面的实施例的方法以用于控制作业机械。控制作业机械可以包括停止作业机械在当前行进方向上的不期望的继续。控制器可以包括接口,该接口用于从传感器、致动器和另外的控制器接收信号以及向传感器、致动器和另外的控制器发送信号。控制器可设计成取决于驱动命令确定作业机械的驱动策略,该驱动命令可以包括期望行进方向以及可替代地或附加的驱动请求,并且以设定点扭矩致动电机。
20、本发明的第三方面涉及一种驱动组,该驱动组具有电机和根据本发明第二方面的控制器。电机可以具有低压逆变器。电机处的当前扭矩只能在有限的范围内由低压逆变器确定,并且与电机处的扭矩有关的信息可以以与操作模式相关的信息的形式从低压逆变器发送到控制器。此外,与电机处的马达速度有关的信息可以从低压逆变器发送到控制器。低压逆变器可以被设计成在发送信号以将电机转换成不适合推进的状态之后将电机转换成无扭矩状态。
21、本发明的第四方面涉及一种作业机械,其具有根据本发明的第三方面的车辆控制器、行进方向开关和驱动组。可替代地,作业机械具有至少一个踏板,例如制动踏板和油门踏板。该至少一个踏板以及可替代地或附加地行进方向开关可以电气地且电子地连接到车辆控制器,该车辆控制器又可以电气地且电子地连接到驱动组并且在此过程中连接到驱动组的控制器。来自该至少一个踏板以及可替代地或附加地来自行进方向开关的信号可以经由车辆控制器发送到控制器。在控制器中,可以执行用于停止在作业机械的当前行进方向上的不期望的继续的方法的步骤。此外,作业机械可以被设计成将电机转换成不适合推进的状态。作业机械可以根据上述公开进行设计。
本文地址:https://www.jishuxx.com/zhuanli/20240718/253205.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表