一种巡检混合翼无人航空器的制作方法
- 国知局
- 2024-08-01 05:49:24
本发明涉及飞行器,尤其涉及一种巡检混合翼无人航空器。
背景技术:
1、在电力传输系统中,输电塔与输电线的定期巡检工作至关重要,输电巡检旨在及时发现并排除可能影响电力设施正常运行的各种隐患。此类巡检任务的核心内容涵盖了对输电线是否存在外来异物附着的细致检查,以及对输电塔是否存在同样异物侵扰或遭遇非法攀爬行为的严密监控。当前,业界普遍采用无人飞行器作为主要的输电巡检工具,此类无人飞行器设置有一个高清摄像机,用于采集输电设备的图像信息,由于摄像机的视场角较窄,因此此类无人飞行器在飞行时只能够采集到极为有限的图像信息,且拍摄角度较为单一,导致输电巡检效率低。
技术实现思路
1、为了克服现有技术的不足,本发明的目的在于提供一种巡检混合翼无人航空器,以解决目前的巡检无人机图像信息采集效率低的问题。
2、本发明的目的采用如下技术方案实现:
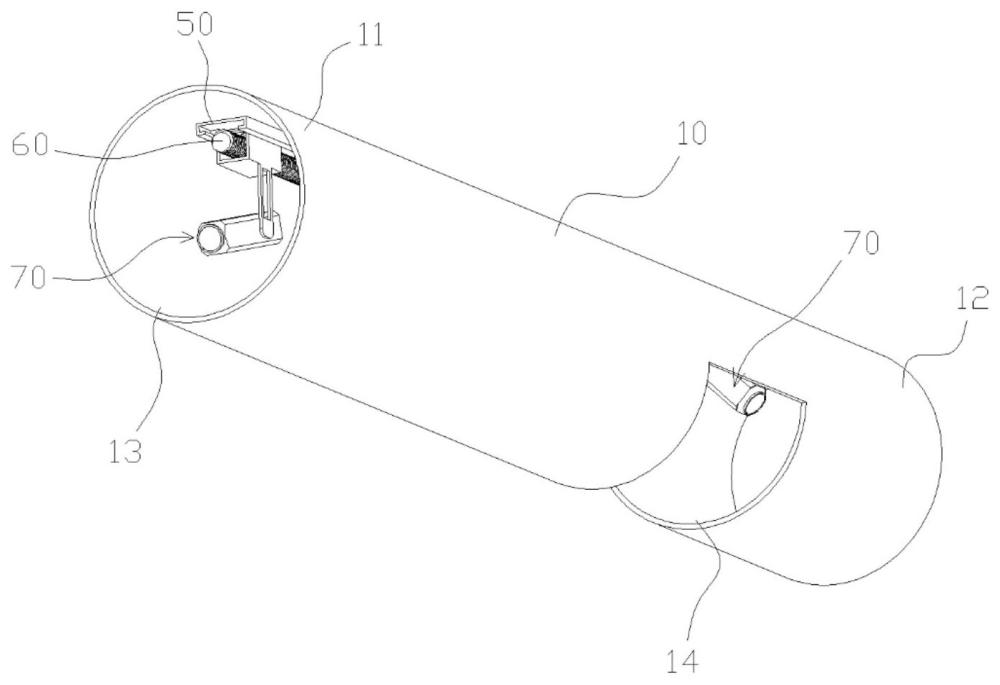
3、一种巡检混合翼无人航空器,包括机身;
4、所述机身为中空且两端相贯通的筒形,且沿一参考轴线延伸设置,所述机身设置有至少两个观察口;
5、所述机身内活动地设有多个摄像装置,所述摄像装置能够在不同的所述观察口之间运动。
6、优选地,所述机身内设置有平行于所述参考轴线的安装导轨;
7、所述摄像装置包括摄像机,所述摄像机可滑动地连接于所述安装导轨;
8、多个所述观察口分别记为第一观察口和第二观察口;
9、所述机身具有首端和尾端,所述首端和/或所述尾端设有所述第一观察口,所述机身的中部设有所述第二观察口;
10、所述摄像机能够沿所述安装导轨在所述第一观察口和所述第二观察口之间运动。
11、优选地,所述机身内设置有与其转动连接的驱动丝杆,所述驱动丝杆与所述安装导轨平行设置;
12、所述摄像机活动连接于所述驱动丝杆。
13、优选地,所述驱动丝杆与所述安装导轨相邻设置;
14、所述摄像机上设有传动组件,所述传动组件包括固设于所述摄像机的驱动电磁体以及活动连接于所述摄像机的传动块,所述传动块的一侧与所述驱动丝杆相对设置,所述传动块的另一侧与所述安装导轨相对设置,所述驱动电磁体用于驱动所述传动块朝所述驱动丝杆运动或朝所述安装导轨运动,所述传动块连接于所述驱动丝杆时二者相啮合。
15、优选地,所述摄像机包括连接架以及转动连接于所述连接架的摄像部件。
16、优选地,所述连接架和所述摄像部件之间设置有用于驱动所述连接架和所述摄像部件绕第一方向相对转动的第一驱动组件、用于驱动所述连接架和所述摄像部件绕第二方向相对转动的第二驱动组件以及用于驱动所述连接架和所述摄像部件绕第三方向相对转动的第三驱动组件,所述第一方向、所述第二方向和所述第三方向两两相垂直设置。
17、优选地,所述摄像装置的数量设有三个。
18、优选地,所述首端和/或所述尾端设有所述第一观察口。
19、优选地,还包括均位于所述机身内的缓冲部件和安装架,所述安装导轨固定连接于所述安装架,所述驱动丝杆转动连接于所述安装架;
20、所述缓冲部件位于所述安装架和所述机身之间,所述缓冲部件的两端分别连接于所述机身和所述安装架。
21、优选地,还包括电连接的飞行控制单元和电池,所述飞行控制单元设于所述机身,所述电池设于所述安装架。
22、相比现有技术,本发明的有益效果在于:
23、筒形的机身内可设置巡检用的摄像装置,机身设置有至少两个观察口,多个摄像装置能够在机身内运动,使摄像装置能够在不同的观察口之间运动,以拍摄不同角度的图像,提高图像采集效率,并通过组合使用多个摄像装置,可实现多种不同的拍摄模式,以达到利用更少数量的摄像装置实现更多种拍摄模式的图像采集。
技术特征:1.一种巡检混合翼无人航空器,其特征在于,包括机身;
2.根据权利要求1所述的巡检混合翼无人航空器,其特征在于,所述机身内设置有平行于所述参考轴线的安装导轨;
3.根据权利要求2所述的巡检混合翼无人航空器,其特征在于,所述机身内设置有与其转动连接的驱动丝杆,所述驱动丝杆与所述安装导轨平行设置;
4.根据权利要求3所述的巡检混合翼无人航空器,其特征在于,所述驱动丝杆与所述安装导轨相邻设置;
5.根据权利要求2至4任一项所述的巡检混合翼无人航空器,其特征在于,所述摄像机包括连接架以及转动连接于所述连接架的摄像部件。
6.根据权利要求5所述的巡检混合翼无人航空器,其特征在于,所述连接架和所述摄像部件之间设置有用于驱动所述连接架和所述摄像部件绕第一方向相对转动的第一驱动组件、用于驱动所述连接架和所述摄像部件绕第二方向相对转动的第二驱动组件以及用于驱动所述连接架和所述摄像部件绕第三方向相对转动的第三驱动组件,所述第一方向、所述第二方向和所述第三方向两两相垂直设置。
7.根据权利要求1所述的巡检混合翼无人航空器,其特征在于,所述摄像装置的数量设有三个。
8.根据权利要求2所述的巡检混合翼无人航空器,其特征在于,所述首端和/或所述尾端设有所述第一观察口。
9.根据权利要求3所述的巡检混合翼无人航空器,其特征在于,还包括均位于所述机身内的缓冲部件和安装架,所述安装导轨固定连接于所述安装架,所述驱动丝杆转动连接于所述安装架;
10.根据权利要求9所述的巡检混合翼无人航空器,其特征在于,还包括电连接的飞行控制单元和电池,所述飞行控制单元设于所述机身,所述电池设于所述安装架。
技术总结本发明公开了一种巡检混合翼无人航空器,属于飞行器技术领域,筒形的机身内可设置多个巡检用的摄像装置,机身设置有至少两个观察口,多个摄像装置能够在机身内运动,使摄像装置能够在不同的观察口之间运动,以拍摄不同角度的图像,提高图像采集效率,并通过组合使用多个摄像装置,可实现多种不同的拍摄模式,以达到利用更少数量的摄像装置实现更多种拍摄模式的图像采集。技术研发人员:曲烽瑞受保护的技术使用者:广东电网有限责任公司广州供电局技术研发日:技术公布日:2024/6/5本文地址:https://www.jishuxx.com/zhuanli/20240722/221585.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表