腹部和尾扇协同推进的仿小龙虾机器人及其耦合运动方法
- 国知局
- 2024-08-01 07:08:19
本发明属于水下机器人应用,具体涉及一种腹部和尾扇协同推进的仿小龙虾机器人及其耦合运动方法,可作为水下平台应用于水下狭窄环境的生态观测、水下勘测、侦察等领域,具有广阔的应用前景。
背景技术:
0、技术背景
1、近年来新兴的软体机器人已成为机器人学领域的重要研究对象,软体机器人的连续性、顺应性和适应性提供了传统刚性机器人无法实现的新功能。但其驱动速度、运动频率上远不如传统刚性机器人,因此提高软体机器人驱动速度和频率有着重要的研究价值。而小龙虾作为入侵物种,因其适应能力强、生长速度快,拥有坚硬外壳的同时又兼具了高游动性能,在国内的生态环境中占绝对竞争优势。因此本发明是以小龙虾为仿生对象,设计出的仿小龙虾机器人可获得高游动性能,为探索和开发海洋资源提供更有效的平台。
2、王进成提出了一种仿虎斑螳螂虾管道机器人专利申请号:202210249019.4),其具有腹腕驱动模式。机器人主体均为刚体结构,利用多个腹腕摆动前进,推进效率低,顺应性不足,达不到很好的运动效果。陈刚提出了一种仿皮皮虾水下机器人专利申请号:202110038072.5),其也是采用上述专利类似的驱动模式。不同的是各个骨架之间采用了柔性连接,提高了机器人的顺应性。储逸尘提出了一种仿莱氏拟乌贼及虾姑的水下多自由度运动机器人专利申请号:202111252957 .1),头部采用了仿乌贼的结构,腹部采用了仿虾姑的结构,具备快速推进移动的能力。但其机动性不足,且结构较为复杂。张凌峰提出了一种基于软执行器仿生虾壳结构的刚柔耦合夹具专利申请号:202211173563 .1)。其内部的软体执行器在充气过程中延展,并在外部连接套筒的限制下进行弯曲活动,并对物体进行抓取,但其输出力和相应速度有限。总之,目前关于面向小龙虾的腹部和尾扇协同推进的内容尚未得到有效研究。
技术实现思路
1、本发明的目的在于提供一种具有高机动性、高游动速度的水下机器人。以小龙虾为仿生对象,设计一种腹部和尾扇协同推进的仿小龙虾机器人,通过腹部和尾扇协同推进来实现高机动性和高游动速度,并提供了腹部和尾扇的耦合运动方法。
2、上述腹部弯曲结构由n个腹部弯曲单元组成,3≤n≤8;每个腹部弯曲单元均由腹部外壳、气动弯曲软体执行器和关节底板组成;气动弯曲软体执行器的一个工作面与关节底板相连,另一个工作面与腹部外壳相连;按头部向尾部方向将所有的腹部弯曲单元按依次称为第一腹部弯曲单元、第二腹部弯曲单元......直至第n腹部弯曲单元;
3、上述第一腹部弯曲单元的关节底板与上述虾头部分相固定,第二腹部弯曲单元的关节底板与第一腹部弯曲单元的腹部外壳相固定......直至第n腹部弯曲单元的关节底板与第n-1腹部弯曲单元的腹部外壳相固定;
4、上述第一、第二......直至第n气动弯曲软体执行器,按顺序以均匀分配或非均匀分配方式分成m组执行器,每一组执行器内的若干气动弯曲软体执行器之间通过气管相联通;
5、腹部弯曲结构拥有多个关节,类似于小龙虾的多节壳体,弯曲起来更加接近真实小龙虾,同时刚性的外壳可以保护内部柔性的软体执行器,提高了使用寿命。
6、上述尾扇弯曲及变张角结构包括尾扇外壳、左尾扇、右尾扇、尾扇气动弯曲左软体执行器、尾扇气动弯曲右软体执行器、左尾扇开合软体执行器和右尾扇开合软体执行器;
7、其尾扇外壳气动弯曲左软体执行器和尾扇气动弯曲右软体执行器安装于第n腹部弯曲单元的腹部外壳内;
8、左尾扇开合软体执行器、右尾扇开合软体执行器安装于尾扇外壳下部;左尾扇后部通过销钉安装于尾扇外壳左侧并使左尾扇根部与左尾扇开合软体执行器外侧的工作面接触配合;右尾扇后部通过销钉安装于尾扇外壳右侧并使右尾扇根部与右尾扇开合软体执行器外侧的工作面接触配合;
9、上述左尾扇开合软体执行器与尾扇外壳气动弯曲左软体执行器通过气管连接;右尾扇开合软体执行器与尾扇外壳气动弯曲右软体执行器通过气管连接;
10、尾扇弯曲及变张角结构是拥有多种自由度,包括扭转、弯曲和开合,在保证自由度的情况下,通过气管连接不同功能的致动器,减少了驱动数目。
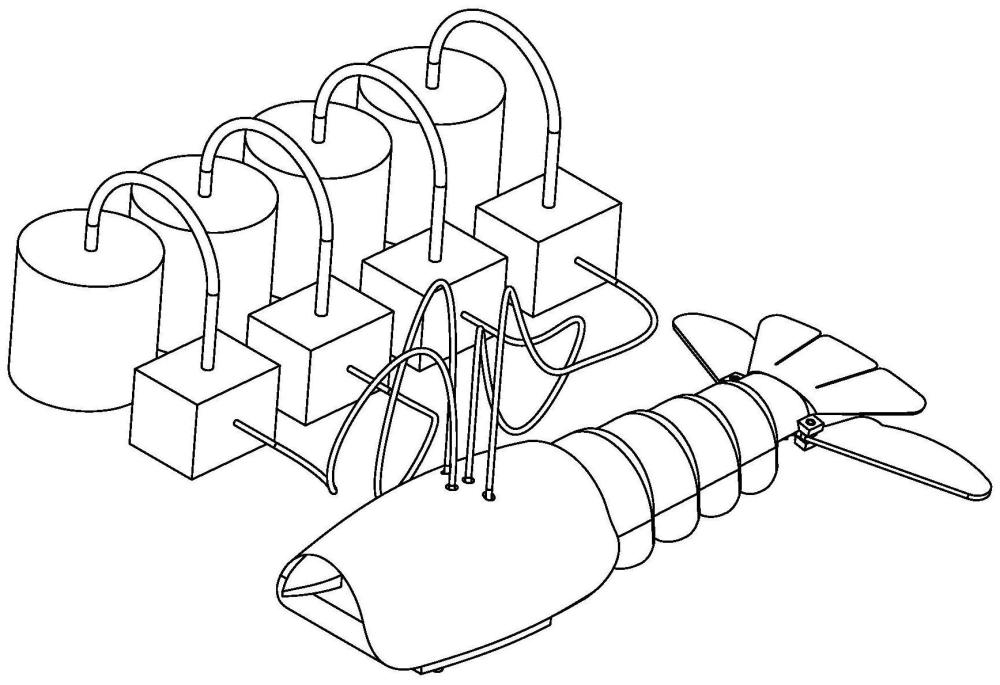
11、上述气动模块包括m个腹部气动单元,它们分别通过气管与上述腹部弯曲结构中的m组执行器中的其中一组执行器相连;
12、还包括2个尾扇气动单元,分别为左尾扇气动单元和右尾扇气动单元,它们分别通过气管与上述尾扇弯曲及变张角结构中的尾扇外壳气动弯曲左软体执行器、尾扇外壳气动弯曲右软体执行器相连。
13、气动模块是仿小龙虾机器人的主要动力来源,对不同驱动对象的气动模块进行分组,方便机器人维护,提高效率。
14、本发明所述的腹部和尾扇协同推进的仿小龙虾机器人的运动方法,其特征在于包括以下过程:
15、通过腹部气动单元对腹部弯曲单元的气动弯曲软体执行器进行泵气或抽气;通过尾扇气动单元对尾扇气动弯曲左软体执行器、尾扇气动弯曲右软体执行器进行泵气或抽气;
16、泵气时,腹部或尾部弯曲;抽气时,腹部或尾部从弯曲状态伸直到自然状态;
17、当所有腹部气动单元、尾扇气动单元都泵气,机器人的腹部和尾部将会弯曲成圆弧状,当所有腹部气动单元、尾扇气动单元都抽气,机器人的腹部和尾部将会伸直;
18、通过左尾扇气动单元和右尾扇气动单元分别对尾扇外壳气动弯曲左软体执行器、尾扇外壳气动弯曲右软体执行器进行泵气或抽气;
19、当左尾扇气动单元泵气,右尾扇气动单元不工作时,尾扇外壳气动弯曲左软体执行器和左尾扇开合软体执行器产生变形,使得尾扇弯曲及变张角结构相对于第n关外壳产生弯曲和扭转,同时左尾扇张角变小;
20、当左尾扇气动单元不工作,右尾扇气动单元泵气,尾扇外壳气动弯曲右软体执行器和右尾扇开合软体执行器产生变形,使得尾扇弯曲及变张角结构相对于第n关外壳产生弯曲和扭转,同时右尾扇张角变小;
21、当左尾扇气动单元和右尾扇气动单元同时泵气时,尾扇弯曲及变张角结构相对于第n关外壳产生弯曲和扭转,同时左尾扇、右尾扇张角均变小。
22、所述的腹部和尾扇协同推进的仿小龙虾机器人的运动方法,其特征在于包括以下过程:
23、拍水运动过程,该运动模式包括以下两种方式:
24、当机器人进行180°掉头:通过腹部气动单元和尾扇启动单元快速泵气,使腹部弯曲结构快速弯曲,左尾扇和右尾扇之间的夹角也不断减小,腹部弯曲结构和尾扇弯曲及变张角结构共同卷曲成圆弧状;由于水对尾扇的反作用力,使得机器人腾空一段距离;在腾空过程中,所有气动单元抽气,机器人快速恢复到原始状态,当气压传感器感受到机器人恢复到原始状态后,控制所有气动单元再次同时泵气,腹部再次快速弯曲成圆弧壮,由于水对尾扇的反作用力,使得机器人前后翻转180°实现掉头;由于机器人重心在虾头部分的下方,机器人实现180°掉头的同时也实现了整体的翻转。
25、当机器人右/左转弯:所有气动单元同时泵气,使腹部弯曲结构快速弯曲,左尾扇和右尾扇之间的夹角也不断减小,腹部弯曲结构和尾扇弯曲和变张角结构共同卷曲成圆弧状;由于水对尾扇的反作用力,使得机器人腾空一段距离;在腾空过程中,所有气动单元抽气,机器人快速恢复到原始状态,当气压传感器感受到机器人恢复到原始状态后,主控板控制m个腹部气动单元、右/左尾扇气动单元泵气,由于左/右尾扇气动单元不工作,尾扇关节气动关节将向左/右扭转,右/左尾扇张角减小,左/右尾扇保持不变;这样使得机器人左右受力不均,进而产生向右/左的偏转力。
26、射流运动过程,该运动模式包括以下两种方式:
27、当机器人进行直线射流逃逸运动时:其初始状态即拍水运动过程的最终状态,腹部弯曲横圆弧状;然后所有气动单元泵气同时反向抽气,使得腹部稍稍展开成直径稍大的圆弧状;接着所有气动单元同时泵气,腹部快速弯曲到直径更小的圆弧,直至尾扇拍打到头部虾头外壳盖板,如此循环,尾扇便在一个较小的范围内快速往复拍动产生射流;该过程由于左尾扇气动单元和右尾扇气动单元同时工作,左尾扇和右尾扇产生的推力相同,这样就实现了机器人的直线逃逸;
28、当机器人进行左/右转弯射流逃逸运动时:其初始状态即拍水运动过程的最终状态,腹部弯曲横圆弧状;然后所有气动单元泵气同时反向抽气,使得腹部稍稍展开成直径稍大的圆弧状;接着m个腹部气动单元和右/左尾扇气动单元同时泵气,左/右尾扇保持张开状态,右/左尾扇张角变小,尾扇弯曲及变张角结构相对于第n关节外壳产生向左/右的扭转,腹部快速弯曲到直径更小的圆弧,直至尾扇拍打到头部虾头外壳盖板,如此循环,尾扇便在一个较小的范围内快速往复拍动产生向右/左的射流,实现右/左转弯。
29、本发明与现有技术相比有如下优点:
30、所有软体执行器由3d打印制成,与传统的软体执行器相比,使用寿命更长,同时能产生更大的输出力;该软体执行器对于泵气和抽气的响应速度和响应频率比传统硅胶软体执行器更快,能够面对不同的水下环境;软体执行器与硬质的外壳采用卡扣配合,这种刚柔耦合的结构能够放大软体执行器的输出力、响应频率和响应速度,同时硬质外壳也能起到保护软体执行器的作用。
31、本发明能够实现仿小龙虾机器人的腹部与尾扇的协同运动,能模拟小龙虾两种逃逸过程,并通过腹部和尾扇的耦合运动有效提高了仿小龙虾机器人的游动速度以及机动性;此外将部分关节软体致动器通过气管连接在一起,即减少了电机的数目,又保留了一定的自由度,进而保证了机器人的机动性;
32、所述的腹部和尾扇协同推进的仿小龙虾机器人,其特征在于:上述虾头部分包括虾头外壳、控制板、气压传感器、电源、虾头外壳盖板;虾头外壳和虾头外壳盖板连接并将控制板、气压传感器、电源密封在虾头外壳的空腔内;控制板内部集成了陀螺仪,电源用于为控制板和气压传感器供电。虾头部分主要容纳元器件及传感器,起到控制和感知的作用;虾头部分整体具有流线型,有限减小了阻力,提高了游动速度,降低能量消耗。
33、所述的腹部和尾扇协同推进的仿小龙虾机器人,其特征在于:上述气动弯曲软体执行器为外分多腔式结构。外分多腔式的软体结构响应速度快,变形量大,输出大,更符合小龙虾腹部的大变形、高运动频率的使用场景。
34、所述的腹部和尾扇协同推进的仿小龙虾机器人,其特征在于:上述气动弯曲软体执行器与关节底板,与腹部外壳之间的连接方式为卡扣连接方式。卡扣的连接方式不易脱落,且便于安装和更换。
35、所述的腹部和尾扇协同推进的仿小龙虾机器人,其特征在于:上述左尾扇开合软体执行器和右尾扇开合软体执行器为一体式结构,其中气路相互独立。一体式的结构可以简化结构,减少其他连接件的使用,使结构更加紧凑。
36、所述的腹部和尾扇协同推进的仿小龙虾机器人,其特征在于:上述左尾扇开合软体执行器和右尾扇开合软体执行器利用其柔性与尾扇外壳尾扇外壳过盈配合。该配合方式安装方便,结构紧凑,减少了连接件的使用。
37、所述的腹部和尾扇协同推进的仿小龙虾机器人,其特征在于:所述腹部气动单元和尾部气动单元均由气泵和电磁阀组成。单一气泵只能实现泵气的功能,利用电磁阀的换向不仅节约了气泵的使用,更提高的泵气和抽气的切换频率。
38、所述的腹部和尾扇协同推进的仿小龙虾机器人,其特征在于:还包括若干分别通过气管与所述腹部弯曲结构中的m组执行器、2个尾扇气动单元相连的气压传感器。通过气压传感器感知各软体执行器的内部气压大小,从而推断软体执行器的变形量,进而进行反馈控制。
本文地址:https://www.jishuxx.com/zhuanli/20240722/226343.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表