车辆用转向系统的制作方法
- 国知局
- 2024-08-01 07:25:31
本发明涉及搭载于车辆的转向系统。
背景技术:
1、在车辆用转向系统中,例如,存在下述专利文献所示的那样的系统,详细而言,存在除了供转向操作部件(以下,存在简称为“操作部件”的情况)连结并且具有驱动源的前轮转向装置之外,还包括将后轮独立于前轮来进行转向的后轮转向装置的系统(以下,存在称为“4轮转向系统”或者“4ws系统”的情况)。在下述专利文献所记载的4轮转向系统中,前轮转向装置的驱动源将施加于操作部件的对驾驶员的操作扭矩进行辅助的操作辅助扭矩作为转向扭矩赋予给前轮,考虑驾驶员感受到的操作感觉的恶化,基于后轮的转向角来决定其操作辅助扭矩。而且,操作扭矩、操作辅助扭矩、转向扭矩、转向角分别是操作力、操作辅助力、转向力、转向量的一种。
2、专利文献1:日本专利第5140662号公报
3、进来,在开发车辆的自动驾驶技术的过程中,也对通过前轮转向装置的驱动源产生的力使前轮积极地转向进行了研究。例如,也对将车辆在成为规范的行驶路线行驶那样的转向力、简言之、驾驶辅助力赋予给前轮进行了研究,通过使该驾驶辅助力为适当的力,能够使4轮转向系统的实用性提高。本发明是鉴于这样的实际情况而完成的,其课题在于提供一种实用性较高的4轮转向系统。
技术实现思路
1、为了解决上述课题,本发明的车辆用转向系统具备:操作部件,由驾驶员进行操作;前轮转向装置,连结该操作部件来实现与该操作部件的操作量对应的转向量的前轮的转向,并且具有用于向前轮赋予转向力的驱动源;后轮转向装置,使后轮独立于前轮进行转向;以及控制器,控制这些前轮转向装置和后轮转向装置,其中,上述控制器构成为:执行用于向前轮赋予转向力的前轮转向力赋予控制,该转向力包含用于使车辆沿着规范行驶路线行驶的驾驶辅助力作为分量,在该前轮转向力赋予控制中,基于用于车辆在规范行驶路线行驶的上述操作部件的操作量亦即目标操作量、和后轮的转向量来决定上述驾驶辅助力。
2、使车辆沿着规范行驶路线行驶的控制是被称为所谓的路线跟踪控制、车道保持控制等(以下,存在称为“路线跟踪控制等”的情况)的控制。上述驾驶辅助力是通过该路线跟踪控制等赋予给前轮的转向力。本发明的车辆用转向系统(以下,存在称为“本转向系统”或者“本系统”的情况)是所谓的4轮转向系统,根据本系统,也基于后轮的转向量来决定赋予给前轮的转向力,因此在4轮转向系统中,例如,实现良好的路线跟踪行为。
3、本系统中的“操作部件”典型地是方向盘,但是例如也可以是操纵杆那样的部件。在操作部件是方向盘的情况下,操作部件的“操作量”例如能够采用从中立位置起的操作角(转向操纵角)。一般来说,车轮的“转向量”是车轮的束角(从中立位置起的转动角),但是例如,既可以是齿条杆等与车轮的转向相关地动作的部件的动作量,另外,在转向装置为了将车轮转向而具有电动马达等驱动源的情况下,也可以是该驱动源的动作量、例如、电动马达的旋转量等。
4、本系统中的“前轮转向装置”能够采用构成所谓的动力转向系统的转向装置。赋予转向力的驱动源只要是电动马达、液压缸等即可。若将赋予给前轮的转向力认为是使车轮转动的力,则一般来说,也能够称为转向扭矩。转向力可以是对连接左右的前轮的转向杆(齿条杆)作用作为使其向左右移动那样的力,另外,也可以是作为旋转力作用于安装方向盘的转向轴的力。
5、本系统中的“后轮转向装置”是不与前轮转向装置机械连接而使后轮独立于前轮地转向的装置。在该车辆是4轮车的情况下,后轮转向装置可以将左右的后轮一同转向,也可以将它们相互独立地转向。后者可以认为是两个后轮转向装置作为一个后轮转向装置发挥功能。后轮转向装置也可以具有驱动源并通过该驱动源将后轮转向。
6、本系统中的“控制器”以由cpu、rom、ram等构成的计算机为主体,能够采用构成为包括前轮转向装置、后轮转向装置具有的驱动源的驱动器等的装置。控制器可以是单一的控制器,分别独立地控制前轮转向装置、后轮转向装置的多个控制器也可以一体地发挥功能。
7、“前轮转向力赋予控制”是用于向前轮赋予转向力的控制。在本系统中,通过前轮转向力赋予控制,向前轮赋予包含“驾驶辅助力”作为分量的转向力。该驾驶辅助力是用于使车辆沿着规范行驶路线行驶的转向力分量。“规范行驶路线”例如能够采用在行驶路面画的左右两侧的划分线的中央的虚拟路线。从不超出本车道的观点出发,也可以为具有一定程度的宽度的行驶路线。规范行驶路线例如基于由监视该车辆的前方的照相机获得的图像数据设定即可。规范行驶路线可以由本系统的控制器设定,另外,例如,也可以从自动驾驶系统的控制器等作为数据来发送。“目标操作量”基于该规范行驶路线决定即可。
8、若将驾驶员施加于操作部件的力作为操作力,则在本系统中,前轮转向力赋予控制中的上述转向力除了上述驾驶辅助力之外,也可以还包括作为辅助操作力的力的操作辅助力作为分量。而且,在操作部件是方向盘的情况下,可以认为操作力是操作扭矩,操作辅助力是操作辅助扭矩。操作辅助力与一般的动力转向系统中的辅助力相同,为与操作力对应的大小的力即可。详细而言,对于操作辅助力而言,操作力越大,则操作辅助力越大即可。若将包含驾驶辅助力与操作辅助力双方作为分量的转向力赋予给前轮,则即使是在赋予驾驶辅助力的过程中有驾驶员的操作力施加于操作部件的情况,也会向前轮赋予适当的转向力。此外,操作力能够通过设置操作力传感器来取得。
9、另一方面,在本系统中,作为后轮转向装置的控制的后轮转向控制例如基于操作部件的操作量来将后轮的转向量决定为目标转向量,并以后轮的实际的转向量变为该目标转向量的方式控制后轮转向装置即可。
10、在前轮转向力赋予控制中,在基于目标操作量和后轮的转向量来决定驾驶辅助力的情况下,其后轮的转向量可以是实际的转向量,另外,也可以是根据目标操作量推断出的转向量。实际的转向量(以下,存在称为“实际转向量”的情况)采用从转向量传感器、根据将后轮转向的驱动源的动作量等获得的值即可。根据目标操作量推断出的转向量(以下,存在称为“推断转向量”的情况)能够通过根据上述的后轮的目标转向量的决定的步骤来推断而获得。实际转向量相对于推断转向量,存在产生一定程度的延迟的可能性,当在赋予驾驶辅助力时驾驶员施加比较大的操作力来对操作部件进行了操作的情况下,该延迟变得比较大。从上述的良好的路线跟踪行为的观点出发,优选采用后轮的推断转向量。
11、对于驾驶辅助力的决定的步骤,并不特别地限定,但是例如基于根据线性二自由度模型推断的车辆的横摆率或者产生于车辆的横向加速度来决定即可。对于该步骤,将在后文中详细叙述。
12、在驾驶辅助力的决定中,也可以决定包含前馈分量和反馈分量在内的驾驶辅助力。在该情况下,基于目标操作量和后轮的转向量来决定前馈分量,并基于实际的操作量相对于目标操作量的偏差来决定反馈分量即可。通过决定包含反馈分量在内的驾驶辅助力,能够执行更适当的前轮转向力赋予控制。
技术特征:1.一种车辆用转向系统,其具备:
2.根据权利要求1所述的车辆用转向系统,其中,
3.根据权利要求1所述的车辆用转向系统,其中,
4.根据权利要求1所述的车辆用转向系统,其中,
5.根据权利要求1所述的车辆用转向系统,其中,
6.根据权利要求1所述的车辆用转向系统,其中,
7.根据权利要求1所述的车辆用转向系统,其中,
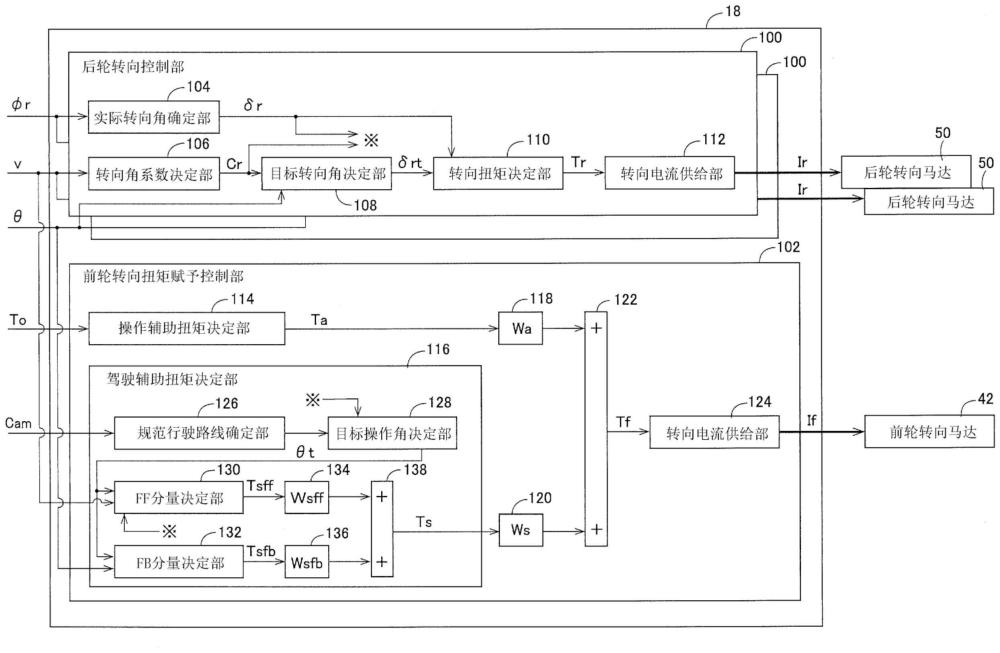
技术总结提供一种实现了良好的路线跟踪行为的4轮转向系统。该车辆用转向系统具备:操作部件,由驾驶员进行操作;前轮转向装置,连结该操作部件来实现与该操作部件的操作量对应的转向量的前轮的转向,并且具有用于向前轮赋予转向力的驱动源(42);后轮转向装置(50),将后轮独立于前轮转向;控制器(18),控制前轮转向装置和后轮转向装置,将控制器构成为:执行用于向前轮赋予包含用于使车辆沿着规范行驶路线(126)行驶的驾驶辅助力作为分量的转向力的前轮转向力赋予控制(102),在该控制中,基于用于车辆在规范行驶路线行驶的操作部件的操作量亦即目标操作量(128)和后轮的转向量(104)来决定驾驶辅助力(130、132)。技术研发人员:吉野隼人,小野仁章受保护的技术使用者:丰田自动车株式会社技术研发日:技术公布日:2024/6/20本文地址:https://www.jishuxx.com/zhuanli/20240722/227519.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表