智能自行车机器人
- 国知局
- 2024-08-01 07:37:28
本发明涉及自行车,具体说是一种智能自行车机器人。
背景技术:
1、随着时间的推移,自行车逐渐发展成为一种普遍的交通工具,可以帮助人们在城市中快速移动,而不受交通拥堵的影响,可以减少对环境的污染和能源消耗,可以增强心肺功能、改善心血管健康,并且有助于控制体重。
2、然而,即使自行车在很多方面都是理想的交通方式,它仍然存在一些技术问题,这些问题不仅影响了自行车的性能和便利性,还导致了一些社会问题的产生。
3、现有的自行车折叠后不能够自主移动,无法实现自动泊车功能,进而无法解决自行车乱停乱放、不规范现象时有发生以及常常占用人行道或非机动车道影响市容市貌的的问题,同时,现有自行车折叠后大多无法实现自平衡,即使部分自行车能够实现自平衡,但均采用调节外置结构状态实现自平衡,有结构脱落的风险带来安全隐患。
技术实现思路
1、针对现有技术中的问题,本发明提供了一种智能自行车机器人。
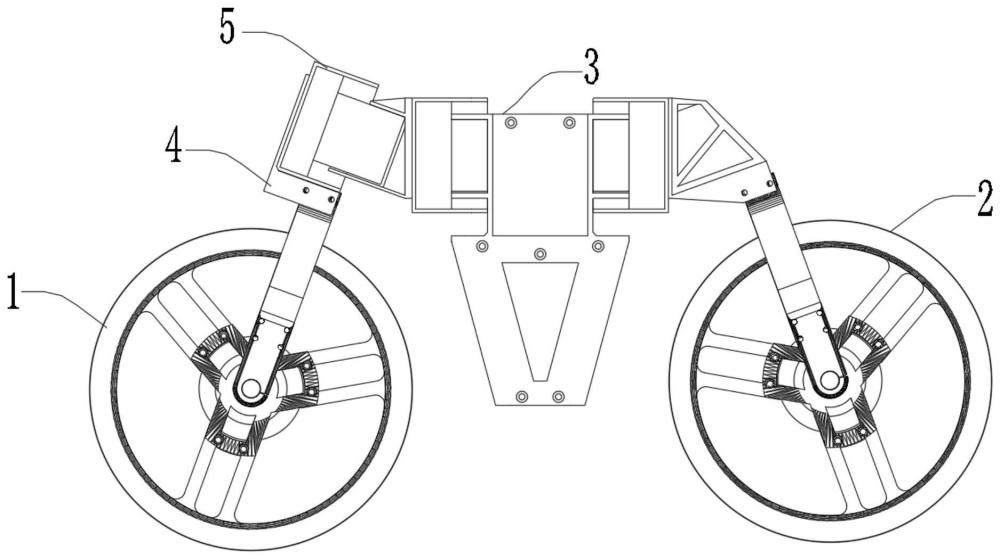
2、本发明解决其技术问题所采用的技术方案是:智能自行车机器人,包括车体以及分别安装在车体前后两端的前轮机构和后轮机构,所述车体包括车身、前倾角件和后倾角件,所述前倾角件转动配合在车身前端,所述后倾角件转动配合在车身后端,所述前轮机构和后轮机构分别通过前倾角件和后倾角件安装在车体两端,该自行车机器人采用三段式折叠车体,在骑行状态(即展开状态)下与普通自行车无异,在非骑行状态(即折叠状态)下能够通过转动前倾角件和后倾角件,折叠为两轮并置态,近似于两轮平衡车,该自行车机器人能够进行折叠,折叠后更加紧凑,便于携带和存放,用户可以更轻松地将自行车机器人放置在车厢、公共交通工具或办公室等空间有限的地方,在折叠状态下,自行车机器人不仅可以作为传统自行车使用,还能够通过pid算法和规定路径进行自主移动,增加了其在不同场景下的应用可能性;
3、其中,所述前轮机构与前倾角件之间增设有前加固件,所述前加固件转动配合在前倾角件端部,所述前轮机构通过前加固件与前倾角件连接。
4、优选的,前轮机构包括前叉和前电机轮,前叉固定安装在前加固件底部,前电机轮转动配合在前叉上。
5、优选的,前轮机构还包括前舵机轮,前舵机轮内嵌套有无刷电机,前舵机轮组合在前电机轮侧部,且前舵机轮驱动前电机轮转动。
6、优选的,后轮机构包括后叉和后电机轮,后叉固定安装在后倾角件上,后电机轮转动配合在后叉上。
7、优选的,后轮机构还包括后舵机轮,后舵机轮内嵌套有无刷电机,后舵机轮组合在后电机轮的侧部,且后舵机轮驱动后电机轮转动。
8、优选的,车身靠近前倾角件的一端安装有驱动前倾角件转动的前折叠舵机,前折叠舵机内嵌套有无刷电机。
9、优选的,车身靠近后倾角件的一端安装有驱动后倾角件转动的后折叠舵机,后折叠舵机内嵌套有无刷电机,自行车在由展开状态变换为折叠态的过程中,分别置于自行车机器人前后的前折叠舵机、后折叠舵机将同时开始工作,分别向相反方向转动90°,使两车轮达到两轮并置态,完成折叠,实现自动折叠功能,折叠后将两轮并置,有利于实现该自行车机器人自平衡功能,通过两轮并置并置方案,仅需控制、驱动自行车机器人自带的无刷电机带动车轮转动实现自平衡,算法较为简单,算法开发难度低,算法运行不易出错,使得该自行车机器人的开发和升级成本低,且使用更加可靠,此外,该自行车机器人的平衡结构均为自身结构,无结构脱落的可能,不存在安全隐患,安全性高。
10、优选的,前倾角件靠近前加固件的一端安装有驱动前加固件转动的转向舵机,转向舵机内嵌套有无刷电机。
11、优选的,车身侧部呈三脚架结构,该自行车机器人于折叠状态侧倒后,可自行展开,后利用车身侧边的三角架结构将自行车机器人支起并再次折叠,期间驱动无刷电机带动前后轮同向转动,调整自行车重心及倾角,使自行车机器人自行恢复为直立可移动态,实现跌倒恢复功能。
12、优选的,车身上安装有双目相机、2d激光雷达、3d激光雷达、广角摄像头、定位模块以及陀螺仪传感器,该自行车机器人在折叠状态下,使用安装于车体上的陀螺仪传感器获取自行车机器人在自平衡状态下的角加速度,通过积分运算、微分运算处理反馈量,驱动安装于前舵机轮和后舵机轮的无刷电机,使自行车机器人保持在一个固定且能够保持自身稳定的倾角,实现自行车机器人自平衡功能,此外,自行车机器人在折叠状态下,可根据系统端传输的路径信息并配合安装于车体上的双目相机、2d激光雷达、3d激光雷达、广角摄像头及定位模块等传感器实现自动避让、自动行驶功能,自行车机器人在用户骑行结束后,自行折叠至折叠状态,自动行驶并运用双目相机、激光雷达等传感器进行扫描、测距检索停车位,能够实现自动泊车功能,通过自动泊车功能,一方面,实现规范停车,有效改善自行车、共享单车乱停乱放、不规范以及常常占用人行道或非机动车道,影响市容市貌的现象,另一方面,在用户骑行至目的地后,可直接离开,无需寻找停车位,自行车机器人会自行折叠并自动泊车。
13、本发明的有益效果:
14、(1)本发明中,该自行车机器人采用三段式折叠车体,在骑行状态(即展开状态)下与普通自行车无异,在非骑行状态(即折叠状态)下能够通过转动前倾角件和后倾角件,折叠为两轮并置态,近似于两轮平衡车,该自行车机器人能够进行折叠,折叠后更加紧凑,便于携带和存放,用户可以更轻松地将自行车机器人放置在车厢、公共交通工具或办公室等空间有限的地方,在折叠状态下,自行车机器人不仅可以作为传统自行车使用,还能够通过pid算法和规定路径进行自主移动,增加了其在不同场景下的应用可能性。
15、(2)本发明中,自行车在由展开状态变换为折叠态的过程中,分别置于自行车机器人前后的前折叠舵机、后折叠舵机将同时开始工作,分别向相反方向转动90°,使两车轮达到两轮并置态,完成折叠,实现自动折叠功能,折叠后将两轮并置,有利于实现该自行车机器人自平衡功能,通过两轮并置并置方案,仅需控制、驱动自行车机器人自带的无刷电机带动车轮转动实现自平衡,算法较为简单,算法开发难度低,算法运行不易出错,使得该自行车机器人的开发和升级成本低,且使用更加可靠,此外,该自行车机器人的平衡结构均为自身结构,无结构脱落的可能,不存在安全隐患,安全性高。
16、(3)本发明中,该自行车机器人在折叠状态下,使用安装于车体上的陀螺仪传感器获取自行车机器人在自平衡状态下的角加速度,通过积分运算、微分运算处理反馈量,驱动安装于前舵机轮和后舵机轮的无刷电机,使自行车机器人保持在一个固定且能够保持自身稳定的倾角,实现自行车机器人自平衡功能,此外,自行车机器人在折叠状态下,可根据系统端传输的路径信息并配合安装于车体上的双目相机、2d激光雷达、3d激光雷达、广角摄像头及定位模块等传感器实现自动避让、自动行驶功能,自行车机器人在用户骑行结束后,自行折叠至折叠状态,自动行驶并运用双目相机、激光雷达等传感器进行扫描、测距检索停车位,能够实现自动泊车功能,通过自动泊车功能,一方面,实现规范停车,有效改善自行车、共享单车乱停乱放、不规范以及常常占用人行道或非机动车道,影响市容市貌的现象,另一方面,在用户骑行至目的地后,可直接离开,无需寻找停车位,自行车机器人会自行折叠并自动泊车,从而节约用户停车时间。
本文地址:https://www.jishuxx.com/zhuanli/20240722/228254.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表