一种爬壁机器人的自适应吸附系统的制作方法
- 国知局
- 2024-08-01 08:06:22
本技术涉及一种爬壁机器人的自适应吸附系统。
背景技术:
1、爬壁机器人是既可以在水平面进行移动也可以在与水平面有角度的壁面甚至是悬垂壁面运动的移动机器人。磁吸附爬壁机器人适用于导磁性材料构成的壁面上进行工作,如船舶、风电等领域的壁面检测、清理、维护等,在磁吸附爬壁机器人的设计中,永磁吸附组件是关键部分,通过永磁吸附组件对导磁壁面产生吸附力,从而产生对壁面的一个正压力,可以让爬壁机器人克服自身重力从而在有一定倾斜度、垂直或者倒立的壁面上具有静止以及移动的能力。然而,目前存在的永磁吸附组件存在一定的问题,如永磁吸附组件的密封性不好,导致空气、水和杂质等物质进入侵蚀了磁钢导致磁吸附力下降,而且爬壁机器人在爬壁时碰到转角或者凹凸不平的壁面时,很有可能会因为磁吸附力不稳定而导致机器人掉落而损坏。
技术实现思路
1、本实用新型提供一种爬壁机器人的自适应吸附系统。
2、本实用新型解决上述技术问题所采用的技术方案为:
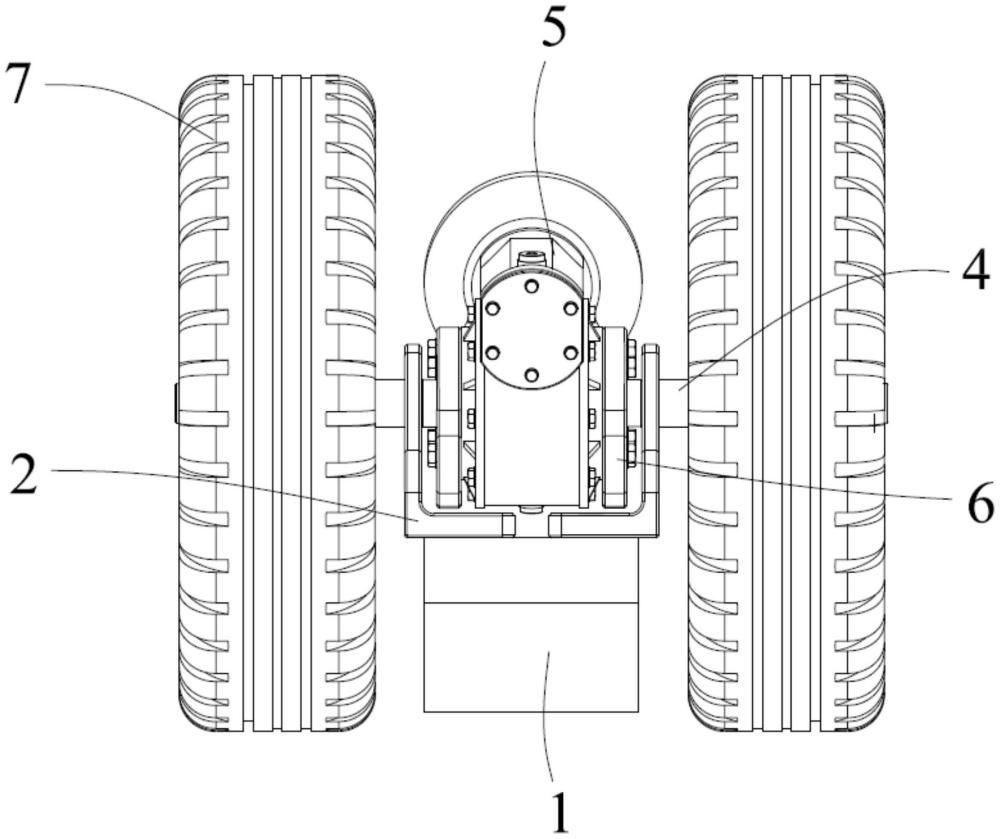
3、一种爬壁机器人的自适应吸附系统,包括磁吸附系统、设置在磁吸附系统上方的两块相对设置的永磁体连接板、设置在磁吸附系统上端的减速机,所述减速机两端均设置有机器人固定支架,所述减速机的内部贯穿设置的传动轴,所述传动轴从减速机两端延伸出来并且穿过机器人固定支架和永磁体连接板,所述传动轴的两端设置有两个轮胎,所述减速机设置在永磁体连接板的内侧,所述机器人固定支架设置在永磁体连接板和减速机之间,所述磁吸附系统包括磁钢、沉头螺钉、磁钢固定支架和外罩,所述磁钢固定支架为一块中间凹陷、两端平整的方形体,所述磁钢为第一磁钢、第二磁钢、第三磁钢、第四磁钢和第五磁钢顺时针拼接而成的扇形体,所述第一磁钢的充磁方向沿弧面相切并且背向第二磁钢,所述第二磁钢的充磁方向沿圆弧半径向内,所述第三磁钢的充磁方向沿弧面相切并且背向第二磁钢和朝向第四磁钢,所述第四磁钢的充磁方向沿圆弧半径向外,所述第五磁钢的充磁方向沿着弧面相切并且朝向第四磁钢,所述磁钢的磁场排列方式为halbach阵列,所述磁钢的外弧面为强磁面、内弧面为弱磁面,所述外弧面为工作面,所述磁钢固定支架的两端设置有四个连接孔,所述连接孔为盲孔,所述永磁体连接板用螺丝固定在磁钢固定支架的连接孔上,所述永磁体连接板通过角接触轴承与传动轴连接,所述机器人固定支架包括支架本体、第一凸肩和第二凸肩,所述第一凸肩和第二凸肩分别位于支架本体的两端,第一凸肩和第二凸肩在机器人固定支架的边缘凸起。
4、优选为,所述两块永磁体连接板为直角板,在磁吸附系统上的安装方式为两个直角相对连接。
5、优选为,所述磁钢利用沉头螺钉固定在磁钢固定支架的凹陷处,所述沉头螺钉埋在磁钢中。
6、优选为,所述沉头螺钉的材料为不锈钢,所述外罩的材料为不锈钢。
7、优选为,所述第一磁钢、第二磁钢、第三磁钢、第四磁钢和第五磁钢的大小相同。
8、优选为,所述支架本体通过螺钉固定在减速机上,所述支架本体沿着第一凸肩的方向往外凸出有长方体支架。
9、与现有技术相比,本实用新型一种爬壁机器人的自适应吸附系统,通过磁钢的halbach阵列,使磁钢的工作面形成了磁性相对于常规排列的磁钢更高的磁场,节约了磁钢原材料的用料,降低了生产成本;所述外罩的上端与磁钢固定支架的边缘通过采用满焊的焊接工艺以及所述磁钢固定支架上的连接孔为盲孔,可以防止空气、水或者其他物质进入磁吸附系统的内部腐蚀磁钢而导致磁钢的吸附力不强,保证了设备的使用寿命;所述两块永磁体连接板为直角板,在磁吸附系统上的安装方式为两个直角相对连接,并用螺丝固定在磁钢固定支架的连接孔上,所述永磁体连接板通过角接触轴承与传动轴连接,当机器人在过转角起伏的墙面时,角接触轴承的滚动可以实现永磁体连接板的相对于轮胎的前后摆动,从而实现磁吸附系统的前后摆动,使得磁钢的强磁力点一直与最近的墙面点吸附,保证与墙面的吸附力最大,避免设备在过转角起伏的墙面时因磁吸附系统底面磁力小而导致设备从墙面掉落而使机器人受损的情况;所述第一凸肩和第二凸肩在机器人固定支架的边缘凸起,分别与永磁体连接板接触来调控磁吸附系统的摆动角度,所述第一凸肩和第二凸肩的凸出高度可以调整磁吸附系统的摆动的角度。
技术特征:1.一种爬壁机器人的自适应吸附系统,包括磁吸附系统(1)、设置在磁吸附系统(1)上方的两块相对设置的永磁体连接板(2)、设置在磁吸附系统(1)上端的减速机(5),所述减速机(5)两端均设置有机器人固定支架(6),所述减速机(5)的内部贯穿设置的传动轴(4),所述传动轴(4)从减速机(5)两端延伸出来并且穿过机器人固定支架(6)和永磁体连接板(2),所述传动轴(4)的两端设置有两个轮胎(7),所述减速机(5)设置在永磁体连接板(2)的内侧,所述机器人固定支架(6)设置在永磁体连接板(2)和减速机(5)之间,其特征在于,所述磁吸附系统(1)包括磁钢(11)、沉头螺钉(12)、磁钢固定支架(13)和外罩(14),所述磁钢固定支架(13)为一块中间凹陷、两端平整的方形体,所述磁钢(11)为第一磁钢(111)、第二磁钢(112)、第三磁钢(113)、第四磁钢(114)和第五磁钢(115)顺时针拼接而成的扇形体,所述第一磁钢(111)的充磁方向沿弧面相切并且背向第二磁钢(112),所述第二磁钢(112)的充磁方向沿圆弧半径向内,所述第三磁钢(113)的充磁方向沿弧面相切并且背向第二磁钢(112)和朝向第四磁钢(114),所述第四磁钢(114)的充磁方向沿圆弧半径向外,所述第五磁钢(115)的充磁方向沿着弧面相切并且朝向第四磁钢(114),所述磁钢(11)的磁场排列方式为halbach阵列,所述磁钢(11)的外弧面为强磁面、内弧面为弱磁面,所述外弧面为工作面,所述磁钢固定支架(13)的两端设置有四个连接孔,所述连接孔为盲孔,所述永磁体连接板(2)用螺丝固定在磁钢固定支架(13)的连接孔上,所述永磁体连接板(2)通过角接触轴承(3)与传动轴(4)连接,所述机器人固定支架(6)包括支架本体(61)、第一凸肩(62)、第二凸肩(63),所述第一凸肩(62)和第二凸肩(63)分别位于支架本体(61)的两端,第一凸肩(62)和第二凸肩(63)在机器人固定支架(6)的边缘凸起。
2.根据权利要求1所述的一种爬壁机器人的自适应吸附系统,其特征在于,所述两块永磁体连接板(2)为直角板,在磁吸附系统(1)上的安装方式为两个直角相对连接。
3.根据权利要求1所述的一种爬壁机器人的自适应吸附系统,其特征在于,所述磁钢(11)利用沉头螺钉(12)固定在磁钢固定支架(13)的凹陷处,所述沉头螺钉(12)埋在磁钢(11)中。
4.根据权利要求1所述的一种爬壁机器人的自适应吸附系统,其特征在于,所述沉头螺钉(12)的材料为不锈钢,所述外罩(14)的材料为不锈钢。
5.根据权利要求1所述的一种爬壁机器人的自适应吸附系统,其特征在于,所述第一磁钢(111)、第二磁钢(112)、第三磁钢(113)、第四磁钢(114)和第五磁钢(115)的大小相同。
6.根据权利要求1所述的一种爬壁机器人的自适应吸附系统,其特征在于,所述支架本体(61)通过螺钉固定在减速机上,所述支架本体(61)沿着第一凸肩(62)的方向往外凸出有长方体支架(64)。
技术总结一种爬壁机器人的自适应吸附系统,包括磁吸附系统、设置在磁吸附系统上方的两块相对设置的永磁体连接板、设置在磁吸附系统上端的减速机,所述减速机两端均设置有机器人固定支架,减速机的内部贯穿设置的传动轴,所述传动轴从减速机两端延伸出来并且穿过机器人固定支架和永磁体连接板,所述传动轴的两端设置有两个轮胎。本技术一种爬壁机器人的自适应吸附系统,通过磁钢的Halbach阵列,使磁钢的外弧面为强表磁面;所述外罩的上端与磁钢固定支架的边缘采用满焊的焊接工艺,磁钢固定支架上的连接孔为盲孔;所述永磁体连接板用螺钉固定在磁钢固定支架的连接孔上,永磁体连接板通过角接触轴承与传动轴连接;所述机器人固定支架包括第一凸肩和第二凸肩。技术研发人员:王月受保护的技术使用者:宁波尼兰德磁业股份有限公司技术研发日:20231226技术公布日:2024/7/11本文地址:https://www.jishuxx.com/zhuanli/20240722/230406.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表