用于防止飞行器的方向舵脚蹬不当操作的告警系统和告警方法与流程
- 国知局
- 2024-08-05 12:12:10
本发明涉及一种用于防止飞机垂尾出现严重载荷情况的告警系统和告警方法,更具体来说,本发明涉及提示一种通过监控飞行器的方向舵脚蹬并在发现方向舵脚蹬出现快速且大行程往复偏转等不当操作时,以告警的形式提示飞行员停止此类不当操作的用于防止飞行器的方向舵脚蹬不当操作的告警系统和告警方法。
背景技术:
1、在历史上曾发生一起因航空飞行员(又可称“飞行员”)为应对尾流采取了不必要且过度的方向舵往复操作,使得飞机垂尾载荷超过设计极限载荷,由此造成了航空历史上严重的空难事故。
2、faa(联邦航空局)在对运输类飞机的飞行员对方向舵脚蹬的使用情况进行调查后,发现飞行员非正常操作方向舵脚蹬的情况远超预期,包括错误的方向舵脚蹬输入和一些往复偏转的情况(例如,遇到尾流涡流),因此,必须采取适当的措施,以告警飞行员正在执行飞行器的方向舵脚蹬不当操作。
3、当前民用航空领域中,部分主流系列的机型上装载有“stop rudder input”(“停止脚蹬输入”)告警功能,该功能用于提醒飞行员禁止进行不适当的方向舵脚蹬操作。
4、已知专利文献1(美国专利us 8584990b2)公开了一种飞行器偏航控制的方法,其中,利用警报系统,通过检测在预定持续时间的第一时间间隔内、由飞行员导致的指令系统的(i)两个相反方向中的一个方向上的至少一个第二位置至(ii)在两个相反方向中的另一个方向上的至少一个第二位置的旋转,来确定方向舵反转状况是否已经被唤起,并且当方向舵反转状况已经被飞行员唤起时,利用警报系统来发出警报,以通知飞行员潜在不安全的方向舵反转状况。
5、该专利文献1的告警逻辑如下:
6、(1-1) 飞行员操作指令系统(脚蹬装置)过程中,在小于或等于3s的时间区间(监控预定时间)内,若指令系统从两个相反方向的极限位置之一到另一个反向的极限位置,则触发告警;
7、(1-2) 告警持续时间:至少持续5秒左右;
8、(1-3) 该警报可以以视觉或声音信号的形式触发,以引起飞行员的注意。
9、但是,在该专利文献1中,告警延时点与方向舵脚蹬幅度是否大于舵偏满偏的脚蹬幅度有关,告警触发点与相反方向的方向舵脚蹬幅度是否大于舵偏满偏的脚蹬位置有关。若考虑延时被触发后的脚蹬保持,该方法适合方向舵脚蹬保持时间较短情况下的识别。
10、另外,已知专利文献2(中国专利cn103693190b)公开了一种防止对飞行器的方向舵脚蹬不恰当操作的警报方法和设备,其中,监视方向舵脚蹬的当前位置以便能检测何时方向舵脚蹬到达极限位置,在该极限位置处方向舵到达其最大旋转位置之一;且当检测到方向舵脚蹬到达极限位置时,在该极限位置处方向舵因此到达其最大旋转位置之一,执行检查以检验在已经到达该极限位置之后的一段预设期限内是否满足以下警报致动条件:方向舵连续地回到中性位置并从该中性位置又离开;且当在预设期限内满足警报致动条件时,触发警报。
11、该专利文献2的告警逻辑是,以舵偏量为监控对象,首先将舵偏数据转化为绝对值,当舵偏达到限偏时触发延时,在预定时间段内(优选3s时间),方向舵连续地从极限位置带到中性位,然后在离开该中性位时(方向任意),此类飞行员的不当操作将自动地触发“stop rudder input”(“停止脚蹬输入”)告警,关于中性位置,可选择到最大偏度之间的任意位置,其中优选1/2最大偏度的位置。
12、但是,在该专利文献2中,告警延时点与是否达到舵偏满偏有关,若考虑延时被触发后的脚蹬保持,该方法适合方向舵脚蹬保持时间较短情况下的识别。此外,在专利文献2中,方向舵舵偏信号取绝对值,所以方向舵出现朝单侧往复偏转时也会触发告警,而单侧往复操作方向舵可能会出现在侧风着陆或是侧风起飞这样的场景中,此时触发告警可能会影响飞行员在某些特殊场景中的正常操作。
13、另外,已知专利文献3(中国专利cn101297250b)公开了一种限制飞行器方向舵偏转角的方法和系统,其中,包括以下操作:检测飞行器侧滑状态以及在第一方向上以最大偏转角进行的对方向舵偏转的第一控制,所述第一方向与所述方向舵的当前位置相反;实施对所允许的最大偏转角的限制。
14、该专利文献3的告警逻辑是,持续监控方向舵,若舵偏从某一方向的舵偏极限运动到另一个方向的舵偏极限,则视为检测到“双偏转”,另外飞机此时存在横向加速度,则认为飞机处于“关键状态”,可能存在超出极限载荷的风险,在这种情况下,实施对所允许的最大偏转角的限制。
15、但是,在该专利文献3中,检测到“双偏转”情况时,是以限制舵偏的方式保证飞行器安全操作,不涉及告警功能。此外该方法需要增加飞机横向加速度检测传感器以用于识别飞机的侧滑状态。
16、因此,如何设计一种能与方向舵脚蹬在某一方向上的较大偏转位置处的保持时间无关,且无需增加(例如飞机横向加速度检测传感器等)机上额外的传感器便能准确地识别往复偏转的发生的告警系统和告警方法,便成为亟待解决的技术问题。
技术实现思路
1、本发明为解决上述现有技术而作,其目的在于,提供一种用于防止飞行器的方向舵脚蹬不当操作的告警系统和告警方法,与方向舵脚蹬在任意某一方向上的较大偏转位置处的保持时间无关,即使方向舵或脚蹬在较大位置处被长时间保持,只要出现了快速且从某一偏转方向上的较大位置向另一偏转方向大行程地往复偏转等不当操作,便能立即被识别到,并以告警的形式提示飞行员停止此类不当操作。
2、为了实现上述目的,本发明提供一种用于防止飞行器的方向舵脚蹬不当操作的告警系统,所述方向舵脚蹬被用于控制飞行器的方向舵在两个相反的枢转方向上围绕竖直轴线的旋转,所述方向舵脚蹬具有脚蹬中性位置并能够在与所述方向舵的两个相反的枢转方向相关联的两个偏转方向上发生偏转,所述方向舵脚蹬在每个偏转方向都有偏转极限位置,其特征是,所述告警系统包括:用于接收所述方向舵脚蹬当前的脚蹬位置的位置信号值的脚蹬位置接收装置;用于接收所述方向舵脚蹬的偏转极限位置的极限位置接收装置;用于对所述方向舵脚蹬的脚蹬位置的历程是否满足告警触发条件进行判断的判断装置;以及在所述方向舵脚蹬的脚蹬位置的历程满足所述告警触发条件时触发告警动作的告警触发装置,作为告警动作监视位置的脚蹬位置阈值包括触发延时动作的延时动作触发位置和触发告警动作的告警动作触发位置,所述告警触发条件包括延时动作触发条件和告警动作触发条件,所述方向舵脚蹬向所述两个偏转方向中的某一偏转方向发生了偏转的脚蹬位置在超过了该某一偏转方向上的延时动作触发位置,然后又返回到该某一偏转方向上的延时动作触发位置时,所述判断装置判断为满足所述延时动作触发条件,并触发预定的延时,并且在所述预定的延时内,所述方向舵脚蹬从向所述某一偏转方向发生了偏转的脚蹬位置开始向与所述某一偏转方向反向的另一偏转方向发生偏转且此时的脚蹬位置到达所述另一偏转方向上的所述告警动作触发位置时,所述判断装置判断为满足所述告警动作触发条件。
3、此外,本发明提供一种用于防止飞行器的方向舵脚蹬不当操作的告警方法,所述方向舵脚蹬被用于控制飞行器的方向舵在两个相反的枢转方向上围绕竖直轴线的旋转,所述方向舵脚蹬具有脚蹬中性位置并能够在与所述方向舵的两个相反的枢转方向相关联的两个偏转方向上发生偏转,所述方向舵脚蹬在每个偏转方向都有偏转极限位置,在所述方向舵脚蹬的所述脚蹬中性位置与所述偏转极限位置之间设定有作为告警动作监视位置的脚蹬位置阈值,其中,所述告警动作监视位置包括触发延时动作的延时动作触发位置和触发告警动作的告警动作触发位置的告警动作监视位置,其特征是,所述告警方法包括:接收所述方向舵脚蹬当前的脚蹬位置的位置信号值的脚蹬位置接收步骤;执行对所述方向舵脚蹬向所述两个偏转方向中的某一偏转方向发生了偏转的脚蹬位置是否在超过了该某一偏转方向上的所述延时动作触发位置后又返回到所述某一偏转方向上的所述延时动作触发位置的延时动作触发判断,并且在判断为满足所述延时动作触发条件时触发预定的延时且同时执行在预定的延时内所述方向舵脚蹬是否从向所述某一方向发生了偏转的脚蹬位置开始向与某一偏转方向反向的另一偏转方向发生偏转且此时的脚蹬位置是否到达所述另一偏转方向上的所述告警动作触发位置的告警动作触发判断的告警触发判断步骤;在所述告警触发判断步骤中判断为所述方向舵脚蹬的脚蹬位置满足告警触发条件时触发告警动作的告警触发步骤。
4、根据本发明的告警系统和告警方法,能够通过监控飞行器的方向舵脚蹬并在发现方向舵脚蹬出现快速且大行程往复偏转等不当操作时,以告警的形式提示飞行员停止此类不当操作,以避免飞行员执行往复操作方向舵脚蹬,从而能够提高飞行器的飞行过程中航向操作的安全性。
5、此外,根据本发明的告警系统和告警方法,通过对所述方向舵脚蹬向两个偏转方向中的任意某一偏转方向发生了偏转的脚蹬位置是否在超过了该偏转方向上的延时动作触发位置后又返回到该偏转方向上的延时动作触发位置进行监控,即,通过将“方向舵脚蹬超过延时动作触发位置并返回该延时动作触发位置”的时间点作为延时动作的触发点,从而与方向舵脚蹬在较大偏转位置处的保持时间无关,即使方向舵脚蹬的脚蹬位置在任意某一偏转方向上超过延时动作触发位置并在该偏转方向上的较大偏转位置处停留保持较长时间,也不会因延时失效而影响往复偏转的识别,只要出现了快速且从某一偏转方向上的较大位置向另一偏转方向大行程地往复偏转等不当操作,便能立即被识别到,并以告警的形式提示飞行员停止此类不当操作。
6、优选的是,所述延时动作触发位置和所述告警动作触发位置是机械上能确定且能检测到的固定位置。
7、现有的绝大多数机型中,设计成在方向舵脚蹬位于偏转极限位置时方向舵处于满舵,而本发明所能应用的不仅包括前述现有的绝大多数机型,还包括在动态过程中可能出现的在方向舵脚蹬位于偏转极限位置时方向舵未处于满舵的情形的机型。
8、根据如上所述构成,通过对具体的脚蹬机械位置进行监视,能即时地识别是否出现了方向舵脚蹬快速且从某一偏转方向上的较大位置向另一偏转方向大行程地往复偏转等不当操作。
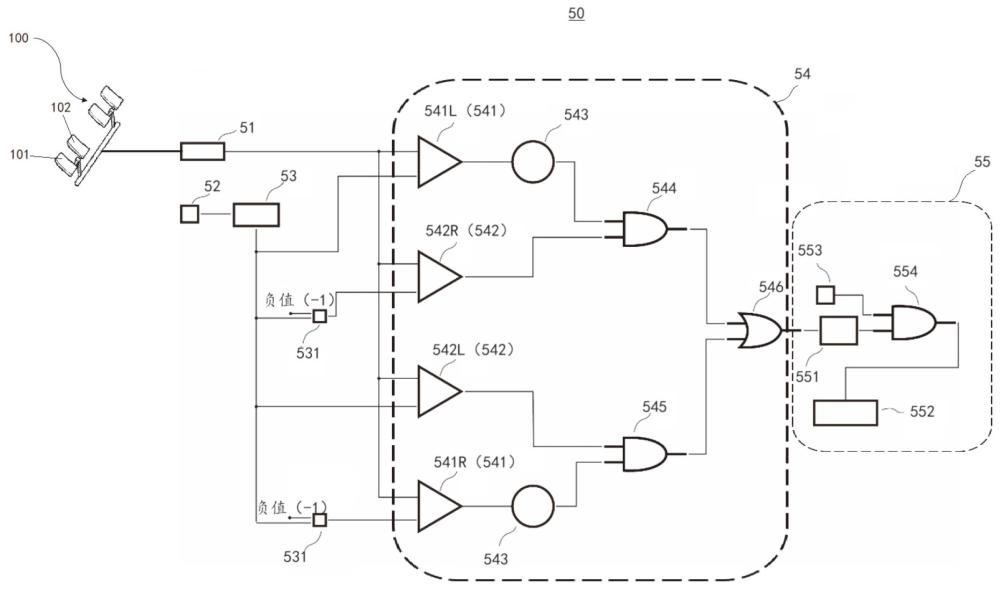
9、优选的是,所述判断装置包括:第一比较器,所述第一比较器用于判断所述方向舵脚蹬的脚蹬位置的历程是否满足所述延时动作触发条件,并在满足所述延时动作触发条件时触发延时器的延时动作;以及第二比较器,所述第二比较器用于判断所述方向舵脚蹬的脚蹬位置的历程是否满足所述告警触发条件。
10、另外,优选的是,所述告警触发装置包括:带计时功能的信号发生器,所述信号发生器在所述告警触发装置被触发告警时开始计时并在规定的计时时间内持续输出告警信号;以及告警提示装置,所述告警提示装置进行告警提示。
11、例如,所述第一比较器对与所述方向舵脚蹬的当前的脚蹬位置对应的当前偏转幅度是否大于同一偏转方向上的所述延时动作触发位置对应的第一偏转幅度阈值进行比较,其逻辑值在所述当前偏转幅度大于所述第一偏转幅度阈值时输出为true值,在所述当前偏转幅度小于等于所述第一偏转幅度阈值时输出为false值,所述第一比较器在其逻辑值从所述true值变为所述false值的时间点,触发延时器的延时动作。并且,在该实例中,所述第二比较器对所述方向舵脚蹬当前的脚蹬位置对应的当前偏转幅度是否大于同一偏转方向上的所述告警动作触发位置对应的第二偏转幅度阈值进行比较,其逻辑值在所述当前偏转幅度大于所述第二偏转幅度阈值时输出为true值,在所述当前偏转幅度小于等于所述第二偏转幅度阈值时输出为false值,所述第二比较器在所述方向舵脚蹬当前的脚蹬位置的偏转方向与所述第一比较器做出触发延时动作的判断时的所述方向舵脚蹬的脚蹬位置的偏转方向不同时且所述第二比较器的逻辑值从所述false值变为所述true值的时间点,触发告警动作。
12、在本发明的一个实例中,所述第一比较器具有在所述两个偏转方向上各自进行比较的两个第一比较器,所述第二比较器具有在所述两个偏转方向上各自进行比较的两个第二比较器,所述判断装置还包括:第一与门,所述第一与门的输入端与所述某一偏转方向上的第一比较器的输出端和所述另一偏转方向上的第二比较器的输出端连接;以及第二与门,所述第二与门的输入端与所述另一偏转方向上的第一比较器的输出端和所述某一偏转方向上的第二比较器的输出端连接。此外,所述判断装置包括或门,所述或门的输入端与所述第一与门的输出端和所述第二与门的输出端连接,并与所述告警触发装置连接。
13、根据如上所述构成,能利用延时器和带计时功能的信号发生器实现边沿检测方法,并能结合多种逻辑门电路(与门、或门)实现告警逻辑,由此,根据脚蹬位置阈值将方向舵脚蹬当前的脚蹬位置的位置信号值转化为数字信号(true值和false值),通过检测数字信号(true值和false值)的上升沿(false值->true值)和下降沿(true值->false值)的方式,能使得告警系统的判断实现更为简洁,占用算力资源更少。
14、另外,根据如上所述构成,能够对方向舵脚蹬向任意某个偏转方向的脚蹬位置向与该某个偏转方向反向的另一偏转方向的往复偏转进行识别,能够实现在双向上实现早期的告警监测和告警提示。
15、另外,优选的是,所述告警触发装置还包括:告警抑制装置,所述告警抑制装置对所述告警提示是否被允许进行判断,并且根据判断结果,允许或是抑制所述告警提示装置进行所述告警提示;以及第三与门,所述第三与门的输入端与所述信号发生器和所述告警抑制装置连接,输出端与所述告警提示装置连接。
16、根据如上所述构成,对于特殊情况下必须进行方向舵脚蹬的往复偏转的情况,能根据其他逻辑判断的结果或是飞行员的手动控制,对方向舵脚蹬的往复偏转的告警提示进行抑制。
本文地址:https://www.jishuxx.com/zhuanli/20240802/261517.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表