旋转推进式植保无人机自主更换电池装置
- 国知局
- 2024-08-05 12:10:12
本发明涉及植保无人机领域,,特别涉及一种旋转推进式植保无人机自主更换电池装置。
背景技术:
1、在智慧农业的体系中,无人机在农业植保方面也得到了大量的运用,无人机在进行药物喷洒或者种子播撒的任务中,由于农田面积大、作业工作量大、工作时间长,需要更换新的电池以保障农用植保无人机的长时间工作。
2、如果能够在农田上搭建一种自主更换电池的装置,既可以解决植保无人机在无人值守的情况下能够自主更换电池的问题,也可以进一步的提高植保无人机作业期间的效率和经济效益。
技术实现思路
1、为了克服目前植保无人机自身存在的续航时间短以及在智慧农业体系中手动更换电池步骤繁琐且效率低下的问题,本发明旨在设计一种旋转推进式植保无人机自主更换电池装置。
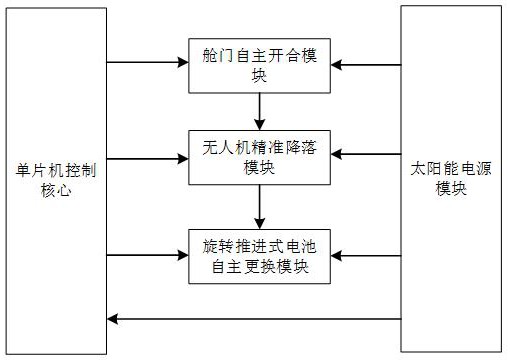
2、所述的旋转推进式植保无人机自主更换电池装置主要具有由以下功能模块组成:舱门自主开合模块、无人机精准降落模块、旋转推进式电池自主更换模块以及太阳能电源模块。
3、所述的舱门自主开合模块包括微波雷达监测系统和运用滑轮且在固定轨道上移动的单扇舱门。微波雷达监测装置安装在舱门侧边,根据无人机的特征,将靠近舱门距离作为舱门打开条件设置雷达设备的识别参数。将微波雷达装置与单片机控制电路连接,通过编程设定舱门打开触发条件,一旦雷达系统检测到符合触发条件的无人机,可以通过与舱门开关机制的连接,发送指令打开移动舱门,并收纳需要更换电池的无人机。
4、所述的无人机精准降落模块包括含有限位槽和比电池侧面积稍大的方形孔的停机坪,所述的限位槽两侧安装有用于再次固定无人机位置的机械卡扣。
5、进一步地,在移动舱门自动打开后,安装在停机坪上含有rtk、gps定位系和图像识别定位系统的装置,通过rtk、gps定位系内基于rtk、gps技术测量降落装置与无人机坐标位置,可以支持较远距离上的飞行感应,可以通过北斗导航的三维坐标算法,确定降落装置与无人机坐标位置,通过相对位置数值控制无人机进行对应的动作指令,在rtk、gps定位系的基础上,在移动距装置合适距离时,用户可通过切换至图像识别定位系状态,由原先的gps定位转换为红外识别,识别红外信标模组,感应到红外信标模组内的红外led灯矩阵模块产生的红外光源,得到红外像素偏移量。
6、其功能在于让收纳进装置的无人机能够在停机坪指定位置落位并对无人机进行自动固定。该模块通过装置于无人机内分别设置的rtk、gps定位系和图像识别定位系两种方式的双重配合下,使无人机精准降落控制更加精确稳定。
7、无人机落在停机坪的限位孔中,所述的限位孔两边的机械卡扣装置在检测到无人机落位后自动将无人机的底角架卡扣固定在地面或者其他支撑物上,通过特定的卡扣设计可以实现稳固的固定以及快速释放。
8、所述的旋转推进式电池自主更换模块包括含有四个凹槽的电池更换转轮、可更换锂聚合物电池以及凹槽中的无线充电部件和推进板。
9、进一步地,在检测到无人机在停机坪上稳定后,所述的旋转推进式电池自主更换模块对无人机的电池进行自主的拆卸和更换;电池更换转轮将空位凹槽旋转至停机坪的电池更换孔下面,无人机的电池利用惯性沿着无人机上的电池滑轨落入空位凹槽中。进一步地,转轮将其他凹槽中已经满电的电池旋转至正对停机坪电池更换孔下面,利用凹槽中的推进板将电池推入无人机上电池更换滑轨中,直至电池上的卡扣固定。
10、所述的太阳能电源模块采用perc电池,能够将农场上可收集太阳能高效的转换成电能并进行储存,并用于整个装置的供能。
11、本发明通过所述的舱门自主开合模块、无人机精准降落模块、旋转推进式电池自主更换模块以及太阳能电源模块四个模块在单片机的控制下协调工作,具有以下的优点:首先装置使得无人机在执行任务时不需要人工干预,从而节省了任务执行的时间和人力成本;其次是可以在电池电量耗尽前自动返回基地更换电池,达到延长无人机工作时间的目的;然后是自主更换电池装置可以减少人为操作引起的错误和失误,提高了更换电池的准确性和可靠性;所述的自主更换电池装置具有一定的智能化和自主性,从而可以实现更高程度的自主作业能力;最后是采用市面上最为先进的太阳能发电装置,可以在一定程度上节约成本和电力资源。。
技术特征:1.旋转推进式植保无人机自主更换电池装置,其特征在于:由单片机控制电路、舱门自主开合模块、无人机精准降落模块、旋转推进式电池自主更换模块以及太阳能电源模块组成。
2.根据权利要求1所述的旋转推进式植保无人机自主更换电池装置,其特征在于:所述的舱门自主开合模块包括在其主体舱门上安装有微波雷达探测器,所述的舱门依靠两侧的双排滑轮轨道进行平行移动。
3.根据权利要求1所述的旋转推进式植保无人机自主更换电池装置,其特征在于:所述的无人机精准降落模块主体为停机坪,所述的停机坪为方形,在其中间嵌入一块所述的具备rtk/ gps定位系和图像识别定位系两种方式的双重配合的装置,在rtk/ gps装置的两侧为双排限位孔,在所述的双排限位孔两侧分别为加固无人机底部支架的机械卡扣,在所述的 rtk/ gps装置正前方为电池更换孔。
4.根据权利要求1所述的旋转推进式植保无人机自主更换电池装置,其特征在于:所述的旋转推进式电池自主更换模块包括其自身整体为一个柱状转轮,所述的柱状转轮正中间为一根中心轴,所述的柱状转轮有四个充电凹槽,所述的充电凹槽底部是电池充电接头,所述的充电接头下方是推进板。
5.根据权利要求1所述的旋转推进式植保无人机自主更换电池装置,其特征在于:所述的太阳能电池模块安装在装置的左边,所述的太阳能电池模块上层为perc太阳能电池板,所述的太阳能电池模块底部为锂离子蓄电池。
技术总结本发明涉及一种旋转推进式植保无人机自主更换电池装置。该装置由以下四个模块组成:舱门自主开合模块、无人机精准降落模块、旋转推进式电池自主更换模块以及太阳能电源模块。四个模块均由单片机进行运行控制。该装置是一个立方体外形,各个部件均分布在该装置中。所述的舱门自主开合模块使用微波激光雷达技术,传感器安装在舱门上,当无人机靠近装置指定的距离时,舱门自动打开;针对无人机精准降落模块针对传统导航方式精度低、误差等问题,使用RTK、GPS定位系和图像识别定位系统的装置,最终使得无人机能够精准落在停机坪的限位孔中。技术研发人员:李昂,徐止政,王子奕,程义受保护的技术使用者:江苏师范大学技术研发日:技术公布日:2024/8/1本文地址:https://www.jishuxx.com/zhuanli/20240802/261363.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表