一种集成式前桥自动转向系统及其控制方法与流程
- 国知局
- 2024-08-05 12:18:27
本发明涉及车辆控制系统,尤其涉及一种集成式前桥自动转向系统及其控制方法。
背景技术:
1、随着我国农业机械自动化及智能化水平不断提高,用户对农业机械的自动化程度提出了更高的要求。如今越来越多的拖拉机已经集成或者加装了自动导航驾驶系统,用于在起垄、播种、植保等不同的田间作业过程中实现拖拉机的自动驾驶与转向,从而保证理想的作业效果。
2、目前,拖拉机自动驾驶导航系统以及自动转向控制技术已逐步在市场上流行,并受到广大农户的喜爱。然而,现有的自动转向系统多采用电动方向盘的方式控制,由于沿用传统的机械连接方式,方向盘、转向机之间存在间隙,导致转向旷量,且转向阻尼的手感无法根据用户习惯调整。
3、综上可知,现有技术在实际使用上显然存在不便与缺陷,所以有必要加以改进。
技术实现思路
1、针对上述的缺陷,本发明的目的在于提供一种集成式前桥自动转向系统及其控制方法,其可以通过设置一种自动控制的结构,通过单纯的采集反向盘的转动角度信号,通过ecu控制单元自动控制转向,避免了机械传动存在的间歇,实现车辆转向功能的实时性。
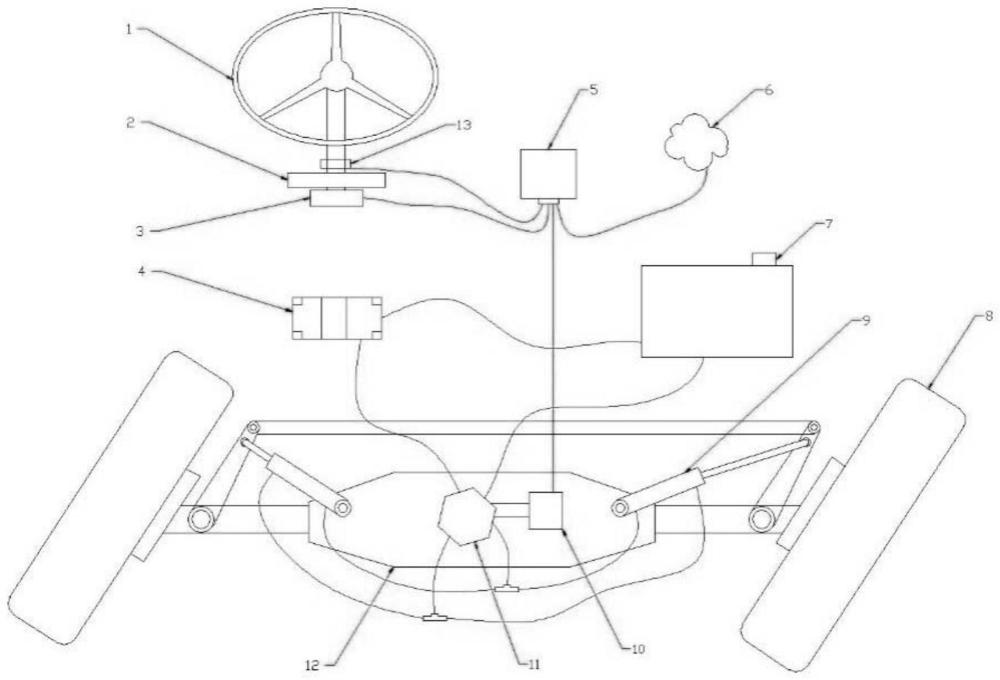
2、为了实现上述目的,本发明提供一种集成式前桥自动转向系统,包括:控制模块,包括手动控制单元和自动驾驶单元,自动驾驶单元和手动控制单元最多只有一个处于运行状态,所述手动控制单元和自动驾驶单元均输出控制信号;数据采集模块,采集车辆的实时状态信息并且接收gnss信号,将对应的信息和信号输送到ecu控制单元;ecu控制单元,采集控制模块的控制信号,并对控制信号进行处理输出执行信号,同时接收数据采集模块的信号,并且对执行信号进行修正;执行模块,与ecu控制单元连接,用于接收执行信号并执行转向动作。
3、根据本发明的集成式前桥自动转向系统,所述手动控制单元包括:
4、方向盘,所述方向盘的转动轴的外部套设有采集反向盘转动角度的方向盘角度传感器,所述方向盘角度传感器与ecu控制单元连接;
5、阻尼限位器,其套设于所述方向盘的外部,用于提供方向盘可变的转向圈数,用于控制方向盘转角与转向轮转角α的比值。
6、根据本发明的集成式前桥自动转向系统,所述执行模块包括:
7、前桥,所述前桥的两端设有转向轮和对转向轮的转向角度进行检测的转向轮角度传感器;
8、液压机构,其包括转向油缸和控制转向油缸伸缩的电机变速器,所述电机变速器与ecu控制单元连接,所述电机变速器控制液压机构向所述转向油缸的内部供油,所述转向油缸的一端铰接于所述前桥上,另一端铰接于转向轮上。
9、根据本发明的集成式前桥自动转向系统,所述电机变速器与所述转向油缸之间设有转向器,所述转向器通过油管与所述转向油缸连接。
10、根据本发明的集成式前桥自动转向系统,所述液压机构还包括对转向器供油的齿轮泵和与齿轮泵连接的油箱,所述转向器的回油管与油箱连接。
11、本发明还提供了一种自动转向系统的控制方法,包括以下控制步骤:
12、s1:检测是否执行自动驾驶模式,若处于自动驾驶模式状态,自动驾驶单元自动发送控制信号到ecu控制单元,若不是处于自动驾驶模式,通过手动控制单元向ecu控制单元发送控制信号;
13、s2:ecu控制单元接收控制信号,控制信号包括手动控制单元中方向盘角度传感器的角度信号和自动控制单元输出的角度信号,所述ecu控制单元对角度进行处理然后输出执行信号到执行机构;
14、s3:数据采集模块采集车辆当前状态信息,包括速度、车辆姿态和行进方向信号并接受gnss信号,数据采集模块将对应信息反馈到ecu控制单元;
15、s4:ecu控制单元采集对比车辆速度信号,实时改变方向盘和转向油缸的转向比,然后实现方向盘的转向旷量的从无到有的变化,并可调整旷量的大小;
16、s5:执行机构接收对应转向比和执行信号,电机变速器驱动转向器给转向油缸供油。
17、根据本发明的自动转向系统的控制方法,在步骤s2中,ecu控制单元对反向盘角度传感器的角度信号的处理步骤如下:
18、s2.1:ecu控制单元定时检测反向盘角度传感器当前角度信息序列yn;其中yn={t1,t2,t3......tn.},其中t1为初始时刻方向盘角度数据,tn为第n个时刻方向盘角度数据;
19、s2.2:根据定时检测的反向盘角度传感器的角度信息用最小二乘法拟合数据曲线x,x=a+b×t+c×t2,其中,a为方向盘运行方程常数参数,b为方向盘运行方程一次参数,c为方向盘运行方程二次参数;
20、s2.3:通过方程可得当前方向盘位置p=a+b×t+c×t2,其中,a为方向盘运行方程常数参数,b为方向盘运行方程一次参数,c为方向盘运行方程二次参数,t为时间;
21、s2.4:通过对曲线的一次求导得到方向盘的旋转速度v=2×c×t+b,其中b为方向盘运行方程一次参数,c为方向盘运行方程二次参数,t为时间;
22、s2.5:通过对曲线的二次求导得到方向盘的旋转加速度a=c,其中c为方向盘运行方程二次参数;
23、得到驾驶员对方向盘操作的具体信息及方向盘的运动预测,采集完后就可以利用以上数据对电机变速器进行控制。
24、根据本发明的自动转向系统的控制方法,所述电机变速器的控制运动方法如下:电机变速器的控制电机采用步进电机或者伺服电机,将方向盘旋转速度信息与加速度信息生成新的运动方程z=a1+b×t+c×t2,其中a1为方向盘当前位置信息,b为方向盘运行方程一次参数,c为方向盘运行方程二次参数,t为时间,将新方程z离散,转换成电机控制的脉冲信息,并将脉冲信息输入电机进行控制,在电机控制过程中加入超前预测控制,通过电机运动方程z可得出电机在接下来n段时间内的运动趋势,将生成的脉冲提前输入到电机中进行超前控制。
25、根据本发明的自动转向系统的控制方法,在自动驾驶模式下,方向盘检测信息无效,此时控制信息来源为自动驾驶单元发出的自动控制指令,在此种条件下,电机控制信息完全按照ecu控制单元自动获取自动驾驶单元的自动运行指令做执行。
26、根据本发明的自动转向系统的控制方法,在方向盘的转动轴上设置有扭矩传感器,所述自动驾驶模块实时检测扭矩传感器信号,当需要切换手动控制单元时,转动方向盘,带动转矩传感器产生转矩信号发送给ecu控制单元,ecu控制单元立即停止采集自动驾驶单元信号转为采集人工控制单元信号。
27、综上,本发明产生的技术效果是:
28、1、采用方向盘+角度传感器的方式收集驾驶员的转向意图,连接可靠无间隙,完全过滤路感。
29、2、采用转向器与电机直连或通过变速机构连接的方式布置在前桥上,提高了集成化程度,节约成本。
30、3、通过ecu控制单元调整角度传感器的分辨率,实现传统方向盘的转向旷量,并可根据使用工况,如山区、丘陵、平原等调整转向旷量的大小。
技术特征:1.一种集成式前桥自动转向系统,其特征在于,包括:
2.根据权利要求1所述的集成式前桥自动转向系统,其特征在于,所述手动控制单元包括:
3.根据权利要求1所述的集成式前桥自动转向系统,其特征在于,所述执行模块包括:
4.根据权利要求3所述的集成式前桥自动转向系统,其特征在于,所述电机变速器与所述转向油缸之间设有转向器,所述转向器通过油管与所述转向油缸连接。
5.根据权利要求4所述的集成式前桥自动转向系统,其特征在于,所述液压机构还包括对转向器供油的齿轮泵和与齿轮泵连接的油箱,所述转向器的回油管与油箱连接。
6.一种自动转向系统的控制方法,其特征在于,包括以下控制步骤:
7.根据权利要求6所述的自动转向系统的控制方法,其特征在于,在步骤s2中,ecu控制单元对反向盘角度传感器的角度信号的处理步骤如下:
8.根据权利要求7所述的自动转向系统的控制方法,其特征在于,所述电机变速器的控制运动方法如下:
9.根据权利要求8所述的自动转向系统的控制方法,其特征在于,在自动驾驶模式下,方向盘检测信息无效,此时控制信息来源为自动驾驶单元发出的自动控制指令,在此种条件下,电机控制信息完全按照ecu控制单元自动获取自动驾驶单元的自动运行指令做执行。
10.根据权利要求6~9任一项所述的自动转向系统的控制方法,其特征在于,在方向盘的转动轴上设置有扭矩传感器,所述自动驾驶模块实时检测扭矩传感器信号,当需要切换手动控制单元时,转动方向盘,带动转矩传感器产生转矩信号发送给ecu控制单元,ecu控制单元立即停止采集自动驾驶单元信号转为采集人工控制单元信号。
技术总结本发明适用于车辆控制系统技术领域,提供了一种集成式前桥自动转向系统及其控制方法,包括:控制模块,包括手动控制单元和自动驾驶单元,手动控制单元和自动驾驶单元均输出控制信号;数据采集模块,采集车辆的实时状态信息并且接收GNSS信号,将对应的信息和信号输送到ECU控制单元;ECU控制单元,采集控制模块的控制信号,并对控制信号进行处理输出执行信号,执行模块,与ECU控制单元连接,用于接收执行信号并执行转向动作,借此,本发明通过设置一种自动控制的结构,通过单纯的采集反向盘的转动角度信号,通过ECU控制单元自动控制转向,避免了机械传动存在的间歇,实现车辆转向功能的实时性。技术研发人员:王立峰,李武海,杨建富,尹伟科,隋海龙,刘焕荣受保护的技术使用者:博鼎精工智能科技(山东)有限公司技术研发日:技术公布日:2024/8/1本文地址:https://www.jishuxx.com/zhuanli/20240802/262067.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表