一种实现最大效率追踪的无线充电系统识别方法
- 国知局
- 2024-08-22 14:41:51
本技术属于新能源无线充电,具体为一种实现最大效率追踪的无线充电系统识别方法。
背景技术:
1、传统有线充电站的建设与维护成本高,且充电过程受限于物理连接,难以满足电动汽车大规模普及后的高效、便捷充电需求。这时,无线充电技术的出现,无疑为绿色出行提供了全新的解决方案。无线充电技术通过电磁感应或磁共振原理,实现了无需物理接触即可为电动汽车充电的目标,无线电能传输系统由于其与用电设备之间没有直接的电气连接,克服了传统有线充电方式在恶劣环境中的安全隐患,具有可靠性高、便携性强的优点;但在现有的wpt 系统的工作过程中,充电对象的变化以及耦合机构之间的偏移会导致系统互感和负载可能会发生变化,该变化将会导致系统的传输性能受到影响。
技术实现思路
1、本发明的目的在于提供一种实现最大效率追踪的无线充电系统识别方法,以解决上述背景技术中提出无线充电设计在自适应性、传输性能等方面存在一定的局限性的问题。
2、为实现上述目的,本发明提供如下技术方案:
3、一种实现最大效率追踪的无线充电系统识别方法,包括全桥逆变器、整流桥、补偿谐振电路、buck-boost电路和负载rl,包括以下步骤:
4、s1,建立lcc-s无线充电系统的辨识适应函数,将辨识问题转化成寻优问题;
5、s2,根据提出的改进的蜣螂算法对s1建立的适应函数寻优,辨识出lcc-s无线充电系统的互感m和负载rl;
6、s3,根据s2辨识出来的互感和负载,计算出最优负载时的占空比,实现系统最大效率实时追踪。
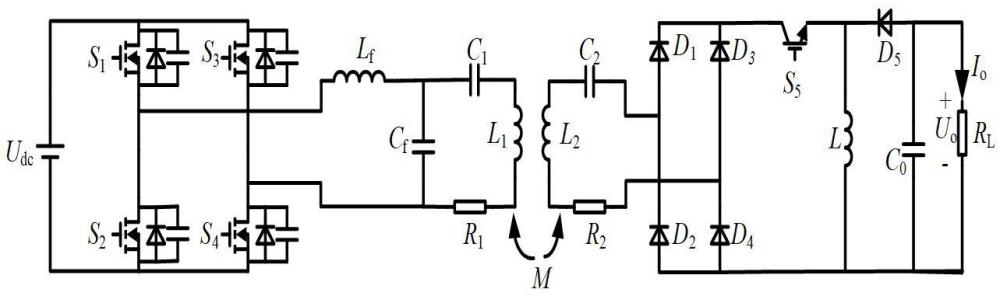
7、优选的,包括全桥逆变器、整流桥、补偿谐振电路、buck-boost电路和负载rl;
8、所述全桥逆变器包括开关管(s1、s2、s3、s4),其中开关管s1和开关管s2串联作为全桥逆变器的前臂a,开关管s3和开关管s4串联作为全桥逆变器的后臂b;
9、补偿谐振电路包括原边补偿谐振电路和副边补偿谐振电路;其中原边补偿谐振电路由原边补偿电容c1与原边线圈l1组成的串联支路与并联电容cf并联后与补偿电感lf串联组成,原边线圈电感l1的寄生电阻记为r1;副边补偿谐振电路由副边串联补偿电容c2与副边线圈电感l2串联组成,副边线圈电感l2寄生电阻记为r2;全桥逆变器的前臂a与后臂b分别与原边补偿谐振电路的两端连接;
10、所述整流桥包括二极管(d1、d2、d3、d4),其中二极管d1、d2串联作为整流桥的a臂、d3、d4串联后作为整流桥的b臂, 整流桥的a臂和b臂并联后分别接副边补偿谐振电路的两端;
11、buck-boost电路包括开关管s5、电感l和二极管d5;电容co并联于buck-boost电路两端,负载rl并联于电容co两端。
12、优选的,步骤s1中,辨识适应函数如下:
13、;
14、其中是辨识模型中的逆变电流,是测量的逆变电流,是辨识模型中谐振电容 c f的电流峰值,是测量谐振电容 c f的电流峰值;
15、辨识模型中逆变电流和谐振电容的电流峰值如下:
16、;
17、其中,,是逆变电流的峰值,是补偿谐振电路二次侧等效电路的阻抗,是输入阻抗,是系统的角频率,是逆变电流的相位差, t是时间;为全桥逆变器输入电压。
18、优选的,改进的蜣螂算法辨识步骤:
19、s21:种群初始化:初始种群的大小、采样时间、迭代次数、参数的取值范围,利用piecewise映射生成初始化种群;
20、s22:计算每个个体的适应度函数 f(m,r l )值;
21、s23:记录并保存最佳结果,确定下一代种群范围;
22、s24:确定迭代条件:判断是否到达迭代次数或辨识精度,如果满足终止条件,输出最佳参数 m、,结束;否则继续执行下一步;
23、s25:通过滚球、跳舞、觅食、偷窃和繁殖的过程更新下一代,在滚球行为中加入随机游走策略和纵横交叉策略进行扰动;
24、s26:更新迭代次数,返回到step 22。
25、优选的,步骤s21中,在改进蜣螂算法的初始化过程中引入了piecewise映射,公式如下:
26、 ;
27、式中, x(t)为当前粒子位置,即互感m或负载当前值;为设定的特征参数值。
28、优选的,步骤s25中,采用随机游走策略对蜣螂滚球行为进行扰动,随机游走策略公式如下:
29、;
30、其中, x(m)为随机游走的步数集 ;c ussum为游走步数累计和;m为当前游走步数; m n为第n次游走步数, r(m)为随机函数;
31、对其进行归一化如下:
32、 ;
33、式中,为第 i只蜣螂在第 h次迭代中的参数m和粒子位置;和分别为第 i维随机游走变量的最小值和最大值;和分别为第 i维随机游走变量在第 h次迭代的最小值和最大值。
34、优选的,步骤s25中,横向交叉假设和分别是配对后的父代个体,其子代为和经以下公式获得:
35、;
36、其中和分别表示和的第j 维,j=1,2,…,、分别是和在第j 维上横向交叉产生参数m 和子代的第j 维,和是(0,1)范围内均匀分布的随机数,和是(-1,1)范围内均匀分布的随机数.生成的参数m和子代分别与其父代进行比较,保留目标函数值更小的个体;
37、纵向交叉如下:
38、 ;
39、其中,和分别表示和的第i 维,是和在纵向交叉产生子代的第i维, r是(0,1)范围内均匀分布的随机数,生成的参数m和rl子代与其父代进行比较,保持目标值更小的个体。
40、优选的,没加入buck-boost电路的无线充电系统谐振时的传输效率计算如下:
41、;
42、其中是系统的角频率,m是线圈互感,是整流之后的等效负载,d是占空比;
43、对效率求偏导,得到系统最大效率时的最优等效负载:
44、 ;
45、而加入buck-boost电路系统的等效负载为:
46、 ;
47、由系统等效负载等于最大效率时的最优负载可以计算得到最大效率时最佳占空比:
48、 ;
49、当线圈发生偏移或充电对象变化时,通过算法参数辨识出互感和负载,计算出最佳占空比,通过设置占空比实现最大效率追踪。
50、优选的,采用pwm控制,工作在互补模式且占空比为50%,当开关管s1和s4导通时,电流流经补偿电感lf和原边补偿电容 c 1 、c f构成的lcc共振网络;在换相过程中,当s1和s4关断时,电流不会立即停止,而是会通过s2和s3的反向并联二极管续流,以确保恒流续流路径;换相结束后,s1和s4关断,s2和s3导通,继续向共振网络提供电能,通过全桥逆变电路,直流电压被逆变为交流电压,作为原边共振网络的输入电压; lcc结构利用谐振方式将电能从发送端传输到接收端;接收端的交流电压,经过由二极管d1、d2、d3、d4组成的全桥整流电路转换为直流电压,经过buck-boost电路升降压,然后经过电容c0滤波输出直流电压 u out,提供给负载 r l。
51、优选的,占空比调节模式如下:
52、首先判断互感或负载是否发生变化,当互感或负载没发生变化时,直接计算占空比;当互感或负载发生变化时,选择单参辨识,如果互感和负载两个参数都发生变化,选择双参辨识 ,系统将重新辨识互感和负载参数,根据互感和负载参数进行计算最优负载时占空比,调整占空比,实现最大效率追踪。
53、与现有技术相比,有益效果如下:
54、1.将无线充电技术引入电动汽车充电系统,可以有效解决传统充电方式中容易出现的过热、过充等安全问题。传统的有线充电方式由于需要反复插拔充电线,充电接头和插口容易出现磨损和老化,导致接触不良,从而引发过热、过充等风险。无线充电通过电磁感应或电磁共振等原理进行能量传输,无需使用充电线缆,能量传输过程不受环境因素如潮湿、灰尘和温度变化的影响,因此比传统的插拔式充电更加安全可靠。此外,无线充电技术的应用还提高了充电系统的耐用性。由于无需物理接触,无线充电避免了机械磨损,延长了充电设备的使用寿命。无线充电系统的设计还可以消除电火花等潜在的安全隐患,减少了火灾和其他事故的风险。无线充电的便捷性也使得电动汽车用户在充电时不再需要手动插拔电缆,提升了用户体验的同时,也增强了充电过程的安全性和可靠性。
55、2.本改进蜣螂算法的参数识别及最大效率追踪的无线充电系统中,比传统算法辨识速度更快,更准确。通过优化参数识别,该系统能够更精确地识别和调整充电过程中的关键参数,从而提高充电效率和稳定性。其次,最大效率追踪功能确保了充电系统始终运行在最佳状态,减少能量损耗,延长设备的使用寿命。此外,这种改进提升了系统的自适应能力,使其能在不同环境和负载条件下保持高效运行。总之,该系统在能效、可靠性和适应性方面都有显著提升,为无线充电技术的发展提供了有力支持。
本文地址:https://www.jishuxx.com/zhuanli/20240822/279530.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种车辆锁车器的制作方法
下一篇
返回列表